






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
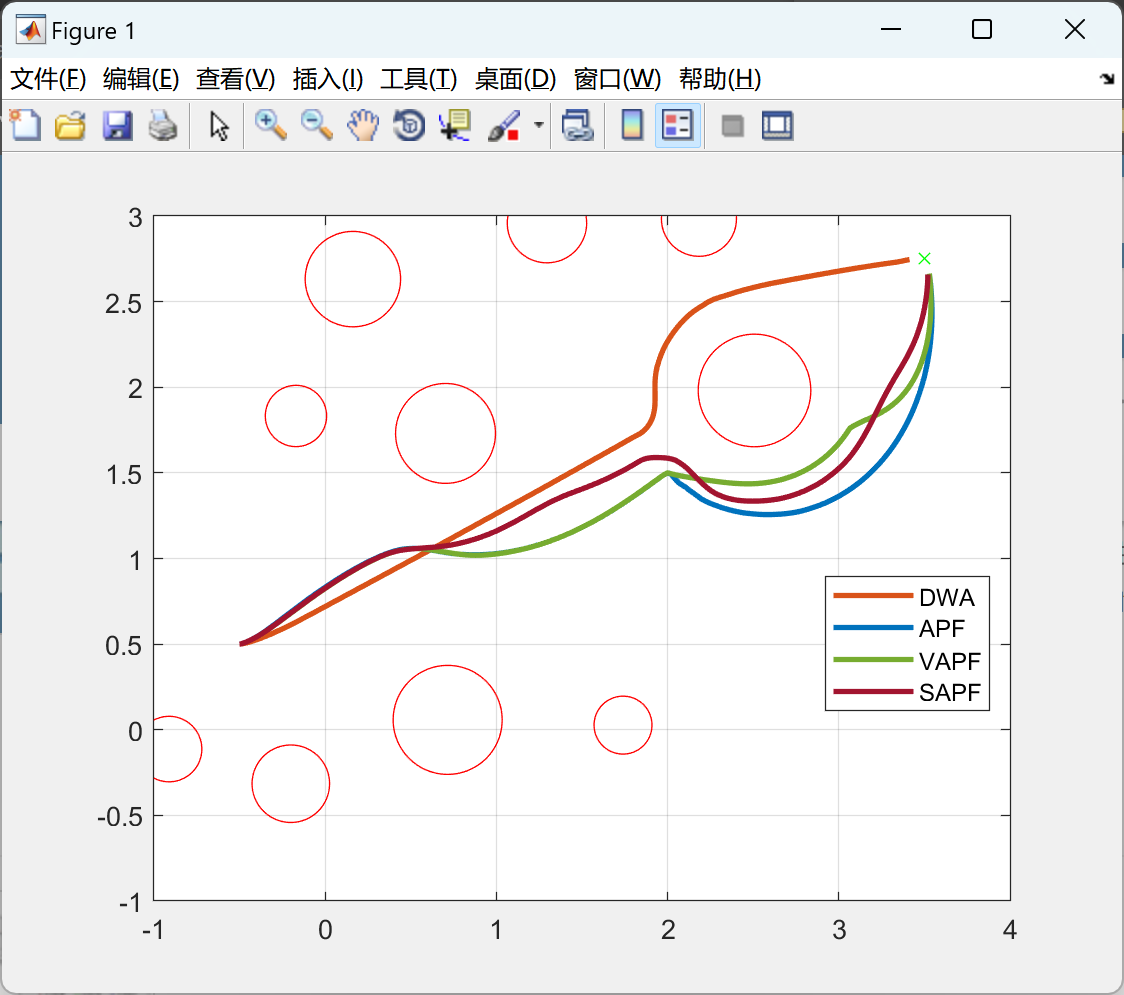
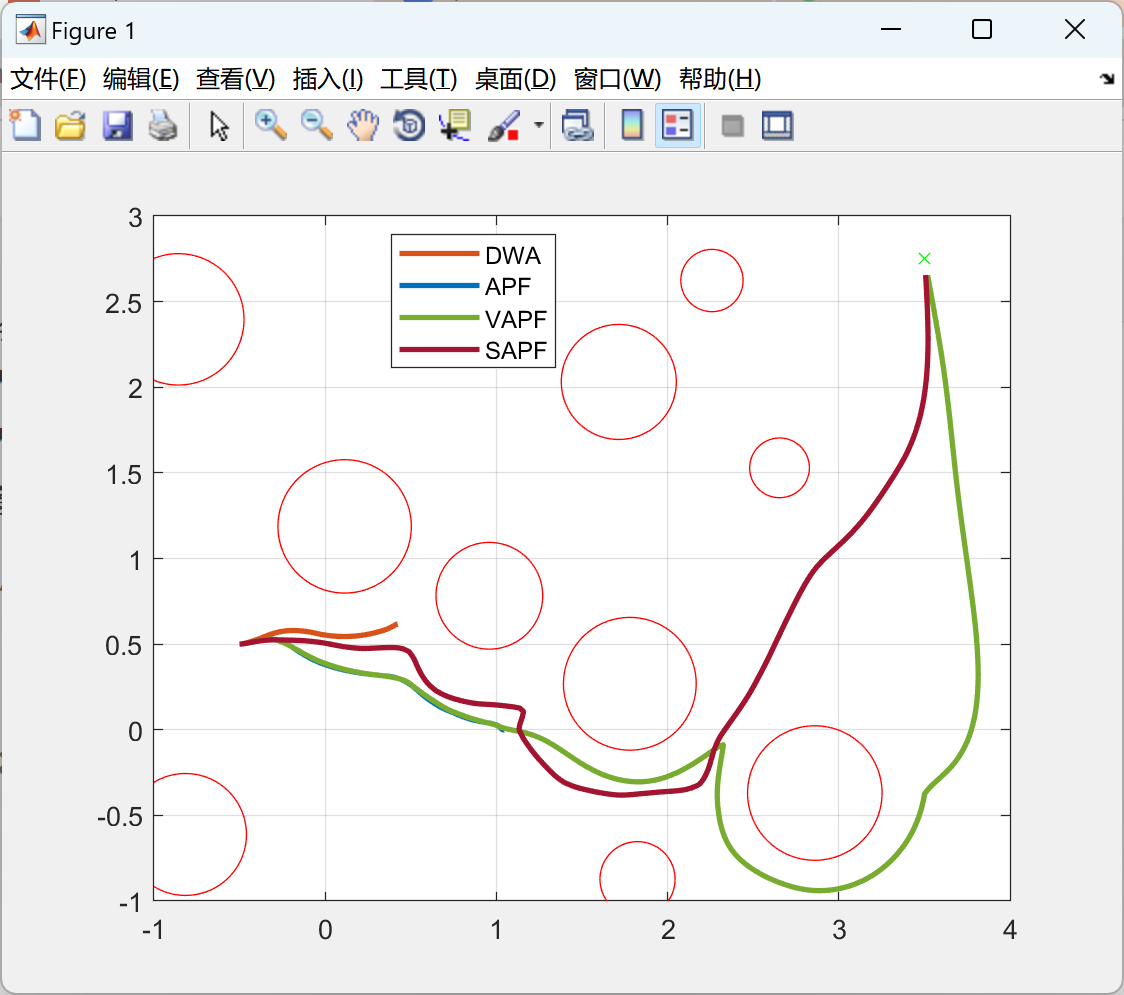
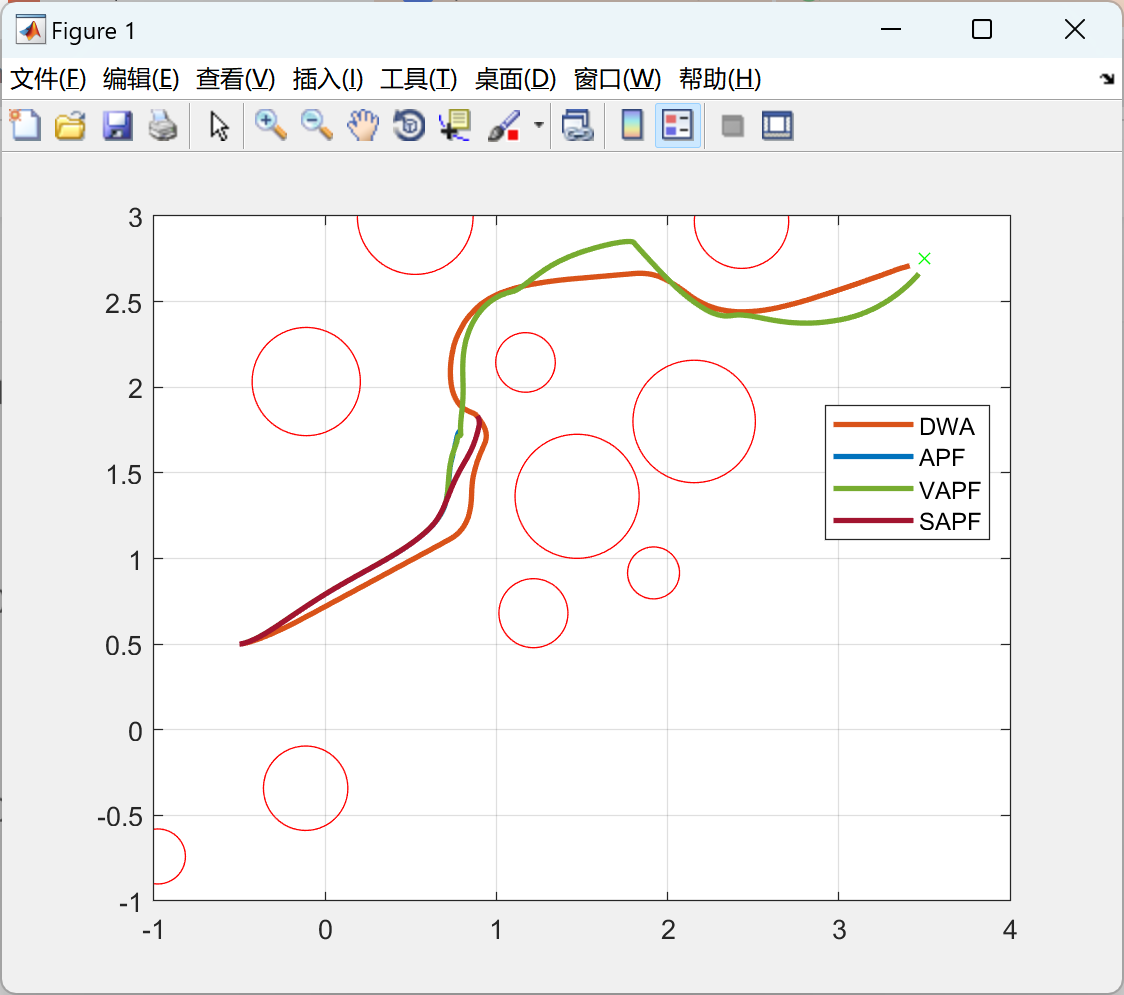
本文研究:【路径规划】【多种算法比较】基于人工势场 (APF) 算法、Vortex APF 算法、Safe APF 算法的路径规划研究
以下局部路径规划算法的比较:
- 人工势场算法 [1]
- 涡旋人工势场算法[2],
- 安全人工势场算法(论文审稿),
- 动态窗口方法[3]。
有障碍物的环境是随机生成的。
在路径规划的研究领域中,有几种不同的局部路径规划算法被广泛应用,包括基于人工势场(APF)算法、Vortex APF算法和Safe APF算法。这些算法被设计用于在具有障碍物的环境中找到最佳路径。
人工势场算法是一种常见的路径规划算法,它基于对机器人和障碍物之间施加吸引力和排斥力的模拟。机器人受到吸引力来靠近目标点,同时受到障碍物的排斥力来避免碰撞。这种算法简单直观,易于实现,但在某些情况下可能会出现局部最小值问题,导致机器人陷入无法找到全局最优路径的困境。
Vortex APF算法是对人工势场算法的改进,它引入了涡旋势场的概念,以更好地处理局部最小值问题。涡旋势场可以帮助机器人摆脱陷入局部最小值的困境,使其能够找到更优的路径。这种算法在复杂环境中表现出色,但仍然存在一些挑战,例如对参数选择的敏感性以及计算复杂性的增加。
Safe APF算法是一种新的路径规划算法,它综合了安全性和效率的考虑。该算法引入了一种评估安全性的指标,以避免机器人与障碍物之间的碰撞。与传统的人工势场算法相比,Safe APF算法可以更好地在复杂环境中规划安全的路径。然而,该算法仍处于研究阶段,需要进一步的实验和验证。
此外,动态窗口方法是另一种常见的局部路径规划算法,它根据机器人的运动能力和环境的动态变化来调整路径规划策略。该方法通过定义一个能够保证机器人正常运动的窗口,来选择合适的路径。这种算法适用于动态环境和高速移动的机器人,但对机器人运动模型和环境的建模要求较高。
需要注意的是,在以上比较中提到的有障碍物的环境是随机生成的,这是为了模拟真实世界中的复杂环境,并测试各种路径规划算法的性能。这些算法的具体表现取决于算法的实现和参数设置,因此在实际应用中,需要结合具体情况选择最适合的路径规划算法。
📚2 运行结果
部分代码:
while norm([x_goal y_goal] - [x y]) > position_accuracy && t < simTimeMax
tic;
% Calculate Attractive Potential
if norm([x y]-[x_goal y_goal]) <= VAPF.dstar
nablaU_att = VAPF.zeta*([x y]-[x_goal y_goal]);
else
nablaU_att = VAPF.dstar/norm([x y]-[x_goal y_goal]) * VAPF.zeta*([x y]-[x_goal y_goal]);
end
% Find the minimum distance from the obstacle & Calculate Repulsive Potential
obst_idx = zeros(1,Obstacle_count);
obst_dist = zeros(1,Obstacle_count);
nablaU_obst = [0 0];
for i=1:Obstacle_count
[obst_idx(i), obst_dist(i)] = dsearchn([obstacle(i,:,1)' obstacle(i,:,2)'], [x y]);
obst_dist(i) = obst_dist(i) + 0.01*(2*rand()-1); % MEASUREMENT NOISE
alpha = theta - atan2(obstacle(i,obst_idx(i),2)-y, obstacle(i,obst_idx(i),1)-x);
alpha = atan2(sin(alpha), cos(alpha));
if obst_dist(i) <= VAPF.Qstar && abs(alpha) < deg2rad(150)
nablaU_rep_Oi = (VAPF.eta*(1/VAPF.Qstar - 1/obst_dist(i)) * 1/obst_dist(i)^2)*([x y] - [obstacle(i,obst_idx(i),1) obstacle(i,obst_idx(i),2)]);
if isVortex == false
if t > 10
if norm( [VAPF.X(t-10) VAPF.Y(t-10)] - [x y]) < 0.02
lastSign = lastSign*-1;
isVortex = true;
end
end
else
goalTheta = atan2(y_goal-y, x_goal-x) - theta;
if abs(goalTheta) < deg2rad(10)
isVortex = false;
end
end
gamma = 0;
if isVortex, gamma = lastSign*pi/2; end
R = [cos(gamma) -sin(gamma)
sin(gamma) cos(gamma) ];
nablaU_obst = nablaU_obst + (R*nablaU_rep_Oi')';
end
end
% Calculate final potential
nablaU = nablaU_att+nablaU_obst;
% Calculate reference value of linear velocity (v_ref) and orientation (theta_ref)
theta_ref = atan2(-nablaU(2), -nablaU(1));
error_theta = theta_ref - theta;
if abs(error_theta) <= VAPF.error_theta_max
alpha = (VAPF.error_theta_max - abs(error_theta)) / VAPF.error_theta_max;
v_ref = min( alpha*norm(-nablaU), VAPF.v_max );
else
v_ref = 0;
end
t_i = toc;
t_max = max(t_max, t_i);
t_min = min(t_min, t_i);
t_sum = t_sum + t_i;
t_count = t_count + 1;
% Simple kinematic mobile robot model
% Omitted dynamics.
omega_ref = VAPF.Kp_omega * error_theta;
omega_ref = min( max(omega_ref, -VAPF.omega_max), VAPF.omega_max);
theta = theta + omega_ref * dT;
theta = atan2(sin(theta), cos(theta));
x = x + v_ref*cos(theta) * dT;
y = y + v_ref*sin(theta) * dT;
% Archive and plot it
t = t + 1;
VAPF.X(t) = x;
VAPF.Y(t) = y;
VAPF.Theta(t) = theta;
end
VAPF.t = t;
VAPF.travelTime = (t-1)*dT;
VAPF.MeanCalculationTime = t_sum/t_count;
VAPF.MaxCalculationTime = t_max;
VAPF.MinCalculationTime = t_min;
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1] O. Khatib, “Real-time obstacle avoidance for manipulators and mobile robots,” in Proceedings. 1985 IEEE International Conference on Robotics and Automation, vol. 2. IEEE, 1985, pp. 500–505
[2] X. Yun and K.-C. Tan, “A wall-following method for escaping local minima in potential field based motion planning,” in 1997 8th International Conference on Advanced Robotics. Proceedings. ICAR’97. IEEE, 1997, pp. 421–426
[3]D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,” IEEE Robotics & Automation Magazine, vol. 4, no. 1, pp. 23–33, 1997.















 653
653











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









