






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
随着我国城市化进程不断加快,城市规模持续拓展,城市生活垃圾的产量急剧攀升。自2004年我国成为全球垃圾产量最高的国家后,垃圾清运量在2016年突破2亿吨,2019年进一步升至3.43亿吨,至2023年已达4亿吨。如此庞大的垃圾产量,给城市环境带来了巨大压力,也对资源利用提出了严峻挑战,城市垃圾处理系统的承载能力正面临严峻考验。在此背景下,如何借助数学建模与系统优化手段提升垃圾分类运输效率,成为城市管理中亟待攻克的关键问题。
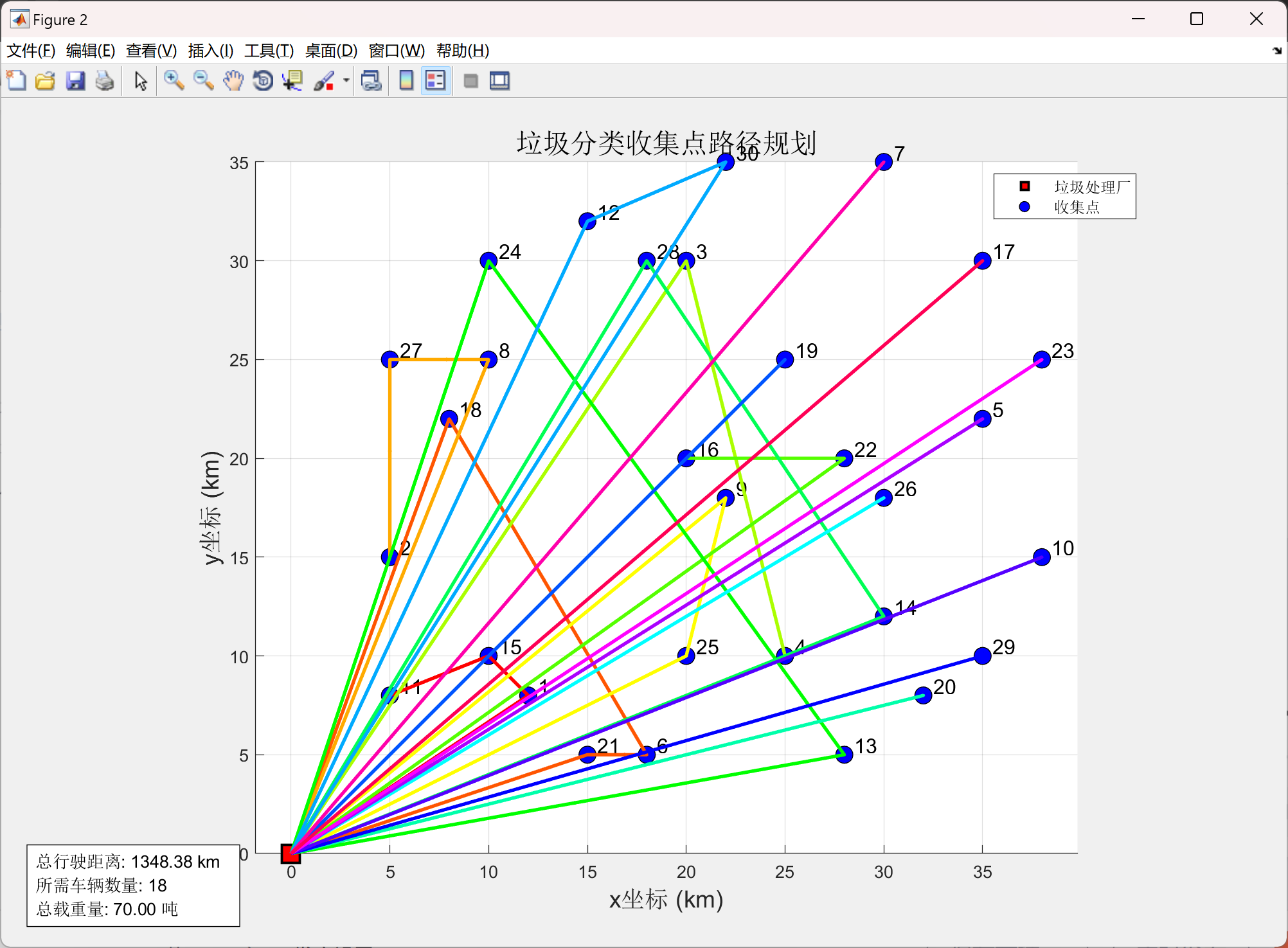
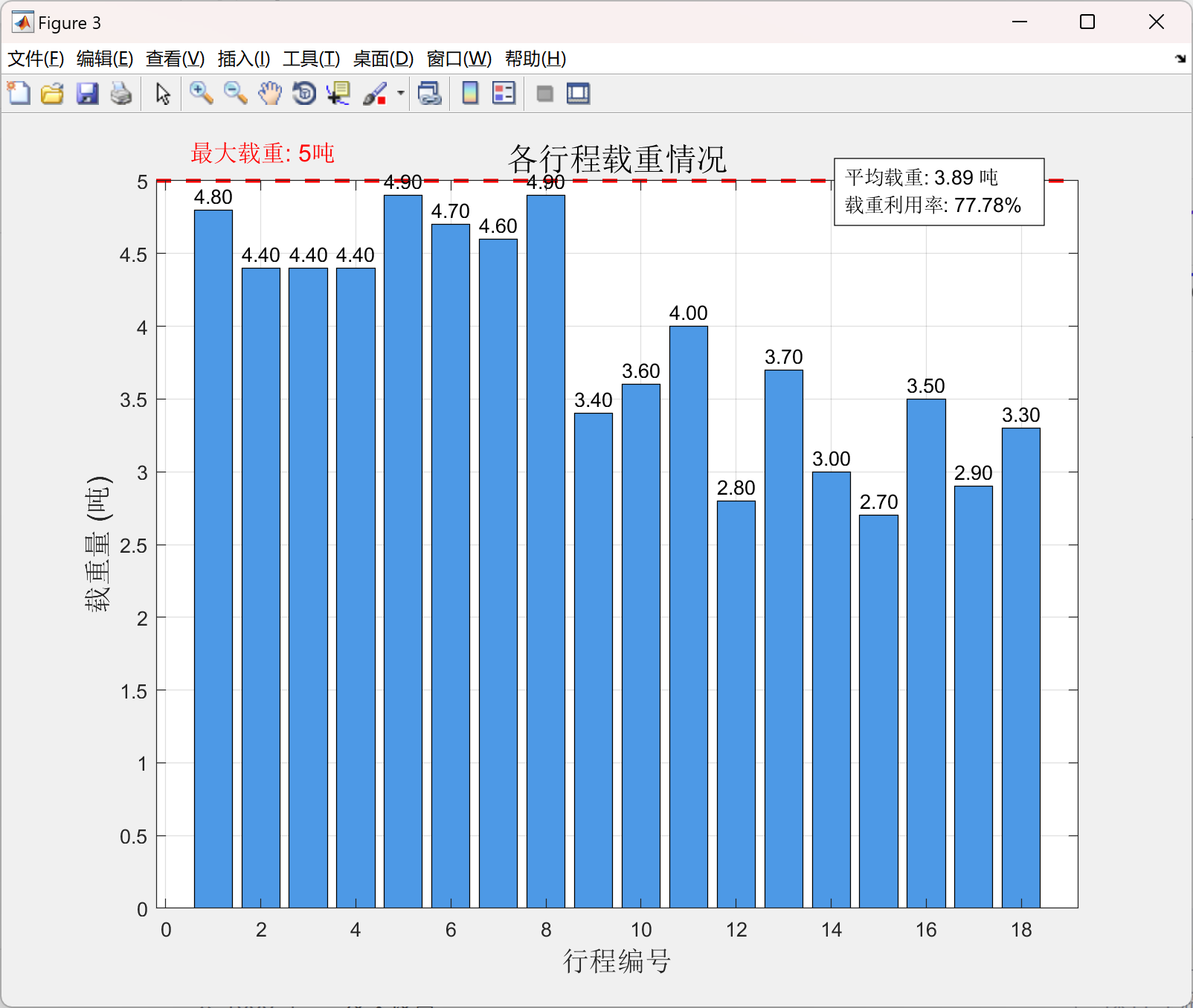
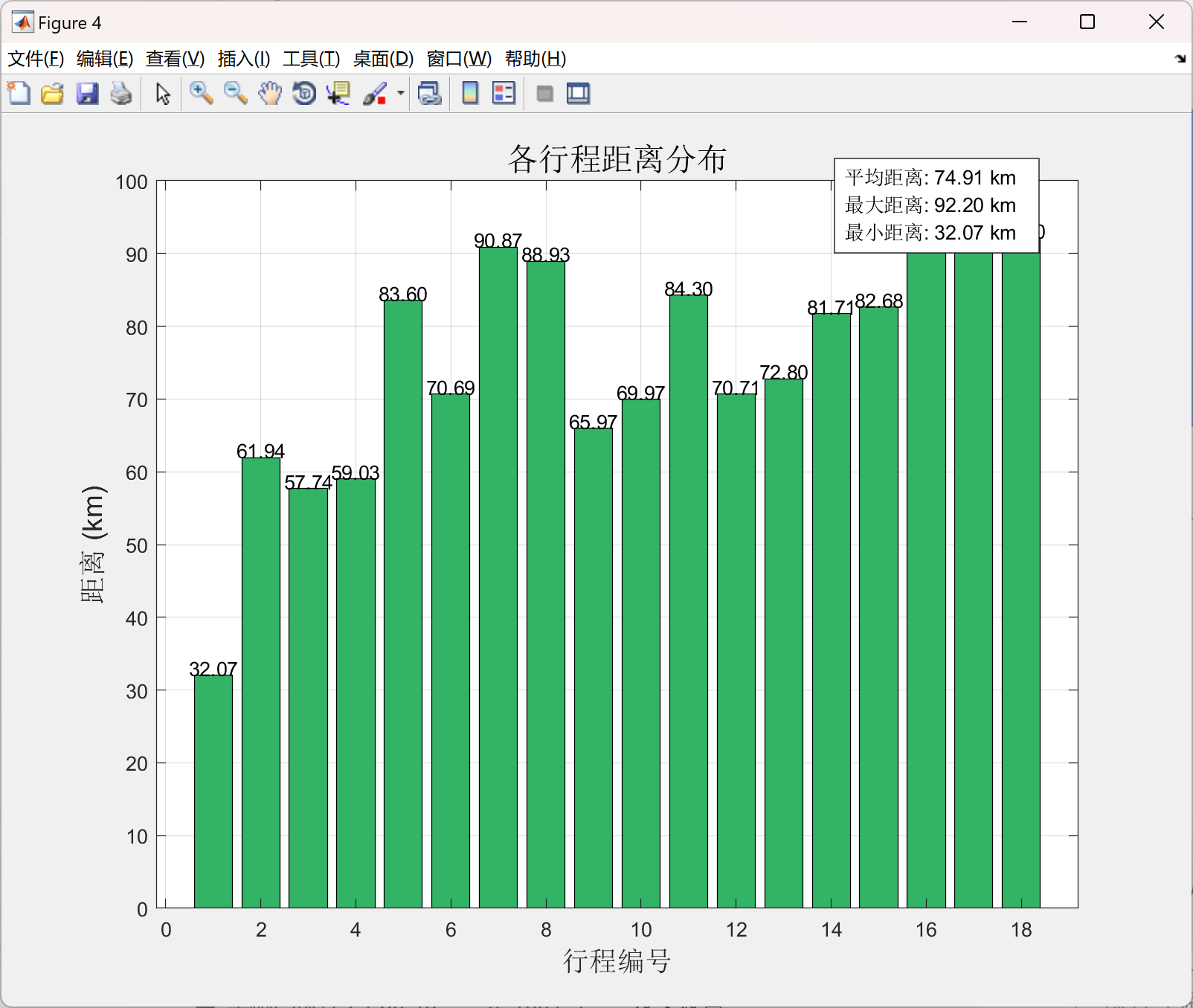
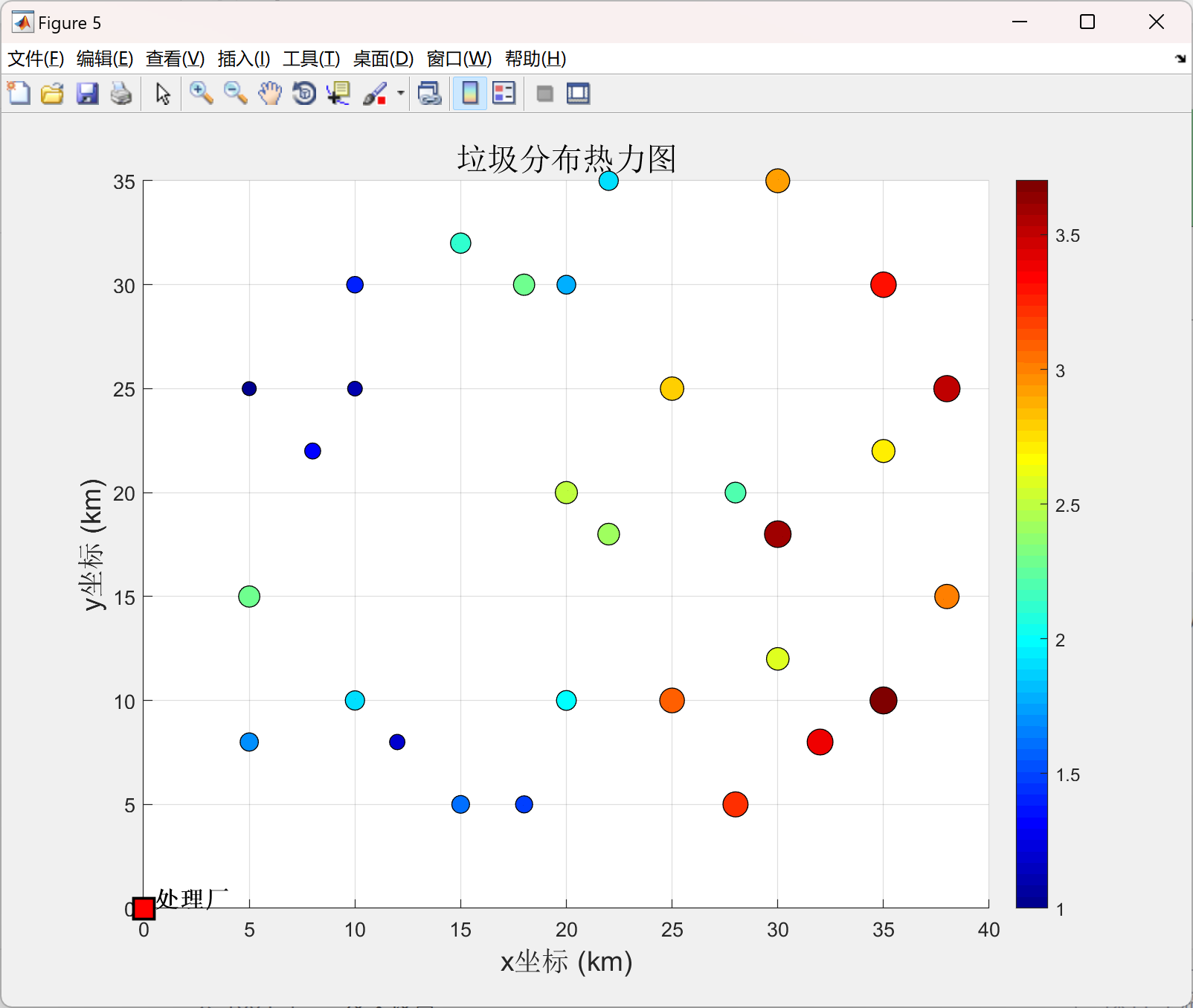
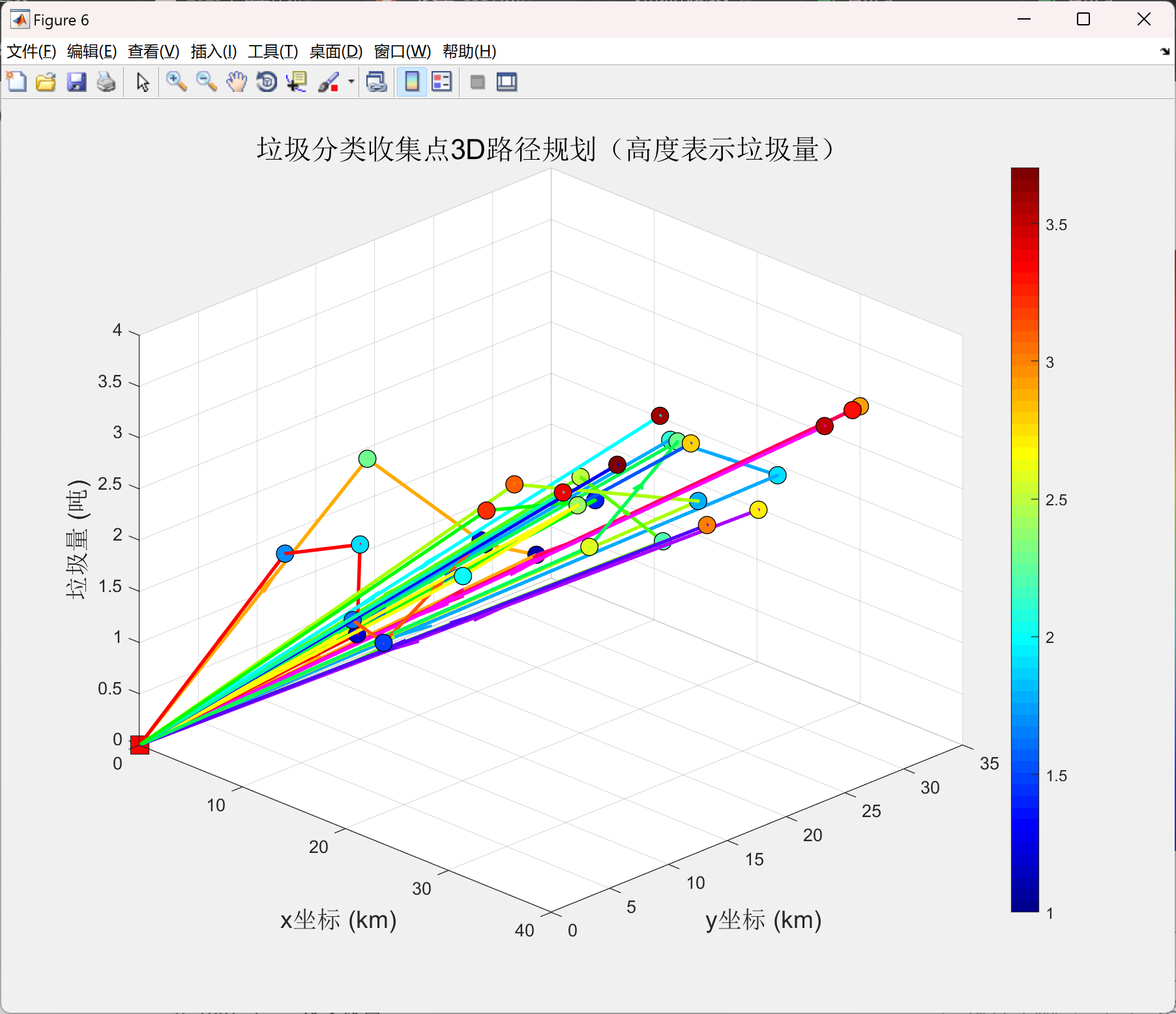
问题一聚焦于单一车型条件下的路径优化与调度。假设某城区设有n个垃圾分类收集点,各收集点每日仅产生厨余垃圾这一单一类型的垃圾。需安排专用车辆从垃圾处理厂出发收集运输这些垃圾,在车辆最大载重Q的限制下,车辆可多次往返以完成所有收集点的垃圾运输任务。目标是构建以最小化每日总行驶距离为核心的数学模型,确定所需运输车辆的数量,明确每辆车的运输路径及任务分配。以30个收集点和5吨载重限制为例,设计算法求解最优解,同时剖析该模型的时间复杂度以及现实局限性,例如未将交通拥堵、车辆速度差异等因素纳入考量。
问题二将研究范围拓展至多车辆协同且存在载重约束的复杂优化场景。此时,厨余垃圾、可回收物、有害垃圾、其他垃圾这四类垃圾需由对应的四类专用车辆运输,各类车辆在载重限制、容积限制以及单位距离运输成本方面均存在差异,且每个收集点可能同时产生多种类型的垃圾。基于此,需构建以最小化每日总运输成本为目标的多车辆协同运输模型。在考虑多车辆调度与类型约束的基础上,对问题一的算法进行改进,以适应这一更为复杂的场景。分析模型约束条件的变化并求解最优解,此外还需探讨如何在模型中引入“车辆每日最大行驶时间”约束,并通过具体案例阐述时间约束对路径规划产生的实质性影响。
问题三提出了包含中转站选址与时间窗口的综合优化难题。考虑在城区规划若干中转站(从m个候选位置中选取),这些中转站可对各类垃圾进行临时存储与分拣,但受到最大存储量限制以及固定时间窗口的约束,车辆仅能在特定时间段内停靠。同时,引入碳排放这一环境指标,碳排放量与车辆载重和行驶距离呈正相关。要求构建“中转站选址 - 路径优化 - 碳排放最少”的综合数学模型,目标是最小化运输成本与中转站建设成本(按10年使用期限分摊)的总和。设计一个两阶段求解算法:第一阶段确定中转站选址以及各收集点对应的中转站分配;第二阶段针对每个中转站,优化各类型车辆的运输路径。需阐明两个阶段之间的关联与协同机制,例如中转站选址如何影响路径长度,路径优化如何体现中转站容量限制等。
此外,问题三还探讨了如何应对实际路网中存在的单行道、禁行时段等非对称约束。这些约束使得从点i到点j的距离与从点j到点i的距离可能存在差异,需对距离矩阵进行相应调整并修改模型。同时,对比分析对称路网与非对称路网下路径优化的复杂度差异,从而得出更契合实际城市交通环境的解决方案。
详细文章见第4部分。
一、城市垃圾分类运输体系的基本流程与优化需求
-
全流程体系构建
垃圾分类运输需实现"源头分类-中端收运-末端处置"的无缝衔接,建立"生活小区-街道-城区"三级网络覆盖。绍兴市规划(2021-2035)提出七类垃圾差异化运输策略:易腐垃圾直运处理点、可回收物经中转站至分拣中心、有害垃圾专线运输等。嘉兴市通过"专车专运+定时定线"模式实现易腐垃圾日产日清。 -
设施布局优化
- 收集点布局:采用"公交化收运"理念,按3平方公里设置中转站
- 转运站分级:综合型转运站处理普通垃圾,专用型处理有害/大件垃圾
- 新能源车辆配置:2027年前实现中心城区全电动化车队
-
关键矛盾分析
矛盾维度 具体表现 时空分布差异 易腐垃圾日产量波动达30%,商业区与住宅区产生时段错位 运输效率与成本 多品类运输导致车辆空载率高达25% 监管盲区 32%城市存在混装混运现象
二、路径优化核心技术体系
-
智能算法框架
# 多目标优化模型示例 def objective_function(routes): cost = calculate_fuel_cost(routes) time = calculate_time_penalty(routes) emission = calculate_carbon(routes) return α*cost + β*time + γ*emission # 加权多目标()运行
- 经典算法:遗传算法(求解效率提升38%)、改进蚁群算法(收敛速度提升25%)
- 创新方向:融合数字孪生技术实现动态仿真

2. 车辆调度创新
全柔性多车舱车辆(FMCVRP):
- 舱位动态调整技术:隔板移动精度达±5cm,支持5种垃圾同步运输
- 经济性对比:相比专用车辆减少行驶距离18%,但单次作业时间增加12%
- 物联网支撑系统
- 感知层:智能垃圾桶称重误差<0.5kg,满载识别准确率99%
- 传输层:5G+RFID实现车辆轨迹实时回传
- 决策层:基于历史数据的LSTM预测模型(MAE<8%)
三、典型创新实践案例分析
-
深圳盐田模式
- 全链条数字化:618个智能回收箱实现"人脸识别+自动称重",运输车辆违规行为AI识别准确率92%
- 经济成效:运输成本降低15%,资源化率提升至42%
-
杭州公交化收运
- 可视化调度:164条分类专线,GPS偏移预警响应时间<3分钟
- 社会效益:混装投诉下降67%,市民监督参与度提升53%
-
武汉数字孪生系统
- 虚实映射:建立转运站3D模型156个,参数同步延迟<1秒
- 动态调度:日处理量波动适应能力提升40%
四、核心挑战与突破方向
- 动态调度难题
- 解决方案:
(η为突发增量系数,β为时间衰减因子)
- 设施协同优化
- 转运站选址模型
- 长效机制建设
- 北京经验:建立"日调度+执法检查"机制,问题整改率从58%提升至92%
- 南京创新:志愿者积分系统提升居民参与度,误投率下降29%
五、未来研究前沿
-
多模态运输网络
探索"电动卡车+无人船+管道运输"组合模式,绍兴规划提出水运占比提升至30% -
车舱创新设计
- 压缩式舱体:处理能力提升50%
- 模块化设计:支持3小时内完成舱位重构
-
碳足迹追踪
建立运输过程LCA模型,上海智慧物流系统实现碳排放精确计量。
📚2 运行结果
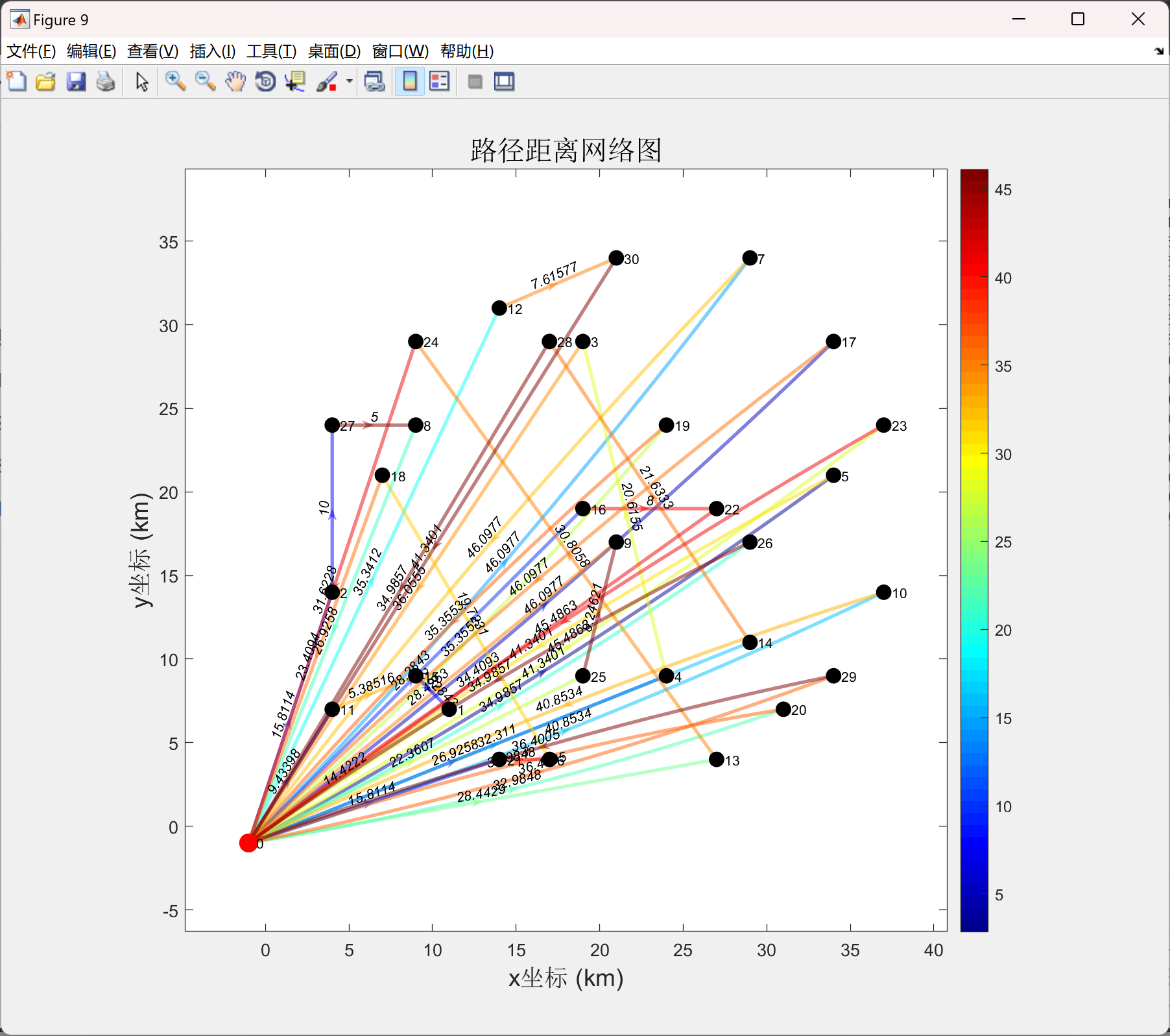
部分代码:
%% 可视化1:路径规划图
figure('Position', [100, 100, 1000, 800]);
% 绘制所有收集点和处理厂
scatter(depot(1), depot(2), 200, 'rs', 'filled', 'MarkerEdgeColor', 'k', 'LineWidth', 2);
hold on;
scatter(points(:,1), points(:,2), 100, 'bo', 'filled', 'MarkerEdgeColor', 'k');
% 标记每个点的编号
text(depot(1)+0.5, depot(2)+0.5, '0', 'FontSize', 12, 'FontWeight', 'bold');
for i = 1:n
text(points(i,1)+0.5, points(i,2)+0.5, num2str(i), 'FontSize', 12);
end
% 绘制每个行程的路径,每个行程用不同颜色
colors = hsv(length(routes));
for i = 1:length(routes)
route = routes{i};
route_coords = coords(route, :);
plot(route_coords(:,1), route_coords(:,2), '-', 'Color', colors(i,:), 'LineWidth', 2);
% 添加方向箭头
for j = 1:(length(route)-1)
p1 = route_coords(j,:);
p2 = route_coords(j+1,:);
mid_point = (p1 + p2) / 2;
direction = p2 - p1;
direction = direction / norm(direction);
% 绘制箭头
quiver(mid_point(1), mid_point(2), direction(1), direction(2), 0.5, ...
'Color', colors(i,:), 'LineWidth', 1.5, 'MaxHeadSize', 1);🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈4 Matlab代码、数据、文章下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 2456
2456

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









