







一.哈希的概念
在前面学习了二叉搜索树、AVL树、红黑树之后,我们得知顺序结构以及平衡树中,元素关键码与其存储位置之间没有对应的关系,因此在查找一个元素时,必须经过关键码的多次比较。顺序查找的时间复杂度为 O(N),平衡树中为树的高度,即(logN),搜索的效率取决于搜索过程中元素的比较次数。
理想的搜索方法:可以不经过任何比较,一次直接从表中得到要搜索的元素。
如果构造一种存储结构,通过某种函数(hashFunc)使元素的存储位置与它的关键码之间能够建立一一映射的关系,那么在查找时通过该函数可以很快的找到该元素。
当向该结构中:
插入元素
根据待插入元素的关键码,以此函数计算出该元素的存储位置并按此位置进行存放。搜索元素
对元素的关键码进行同样的计算,把求得的函数当作元素的存储位置,在结构中按此位置取元素进行比较,若关键码相等,则搜索成功。
该方法即为哈希(散列)方法,哈希方法中使用的转换函数称为哈希(散列)函数,构造出来的结构称为哈希表(hash Table)(或称散列表)
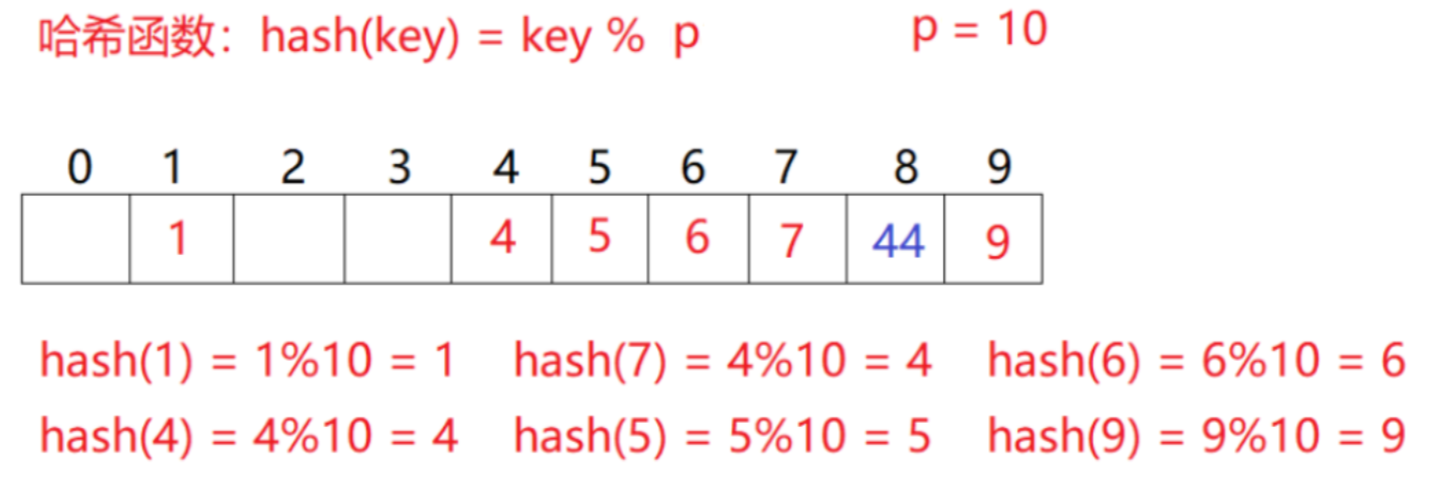
使用以上方法插入直接进行映射插入,搜索时不必进行关键码的比较,因为搜索速度非常快。
1. 哈希冲突
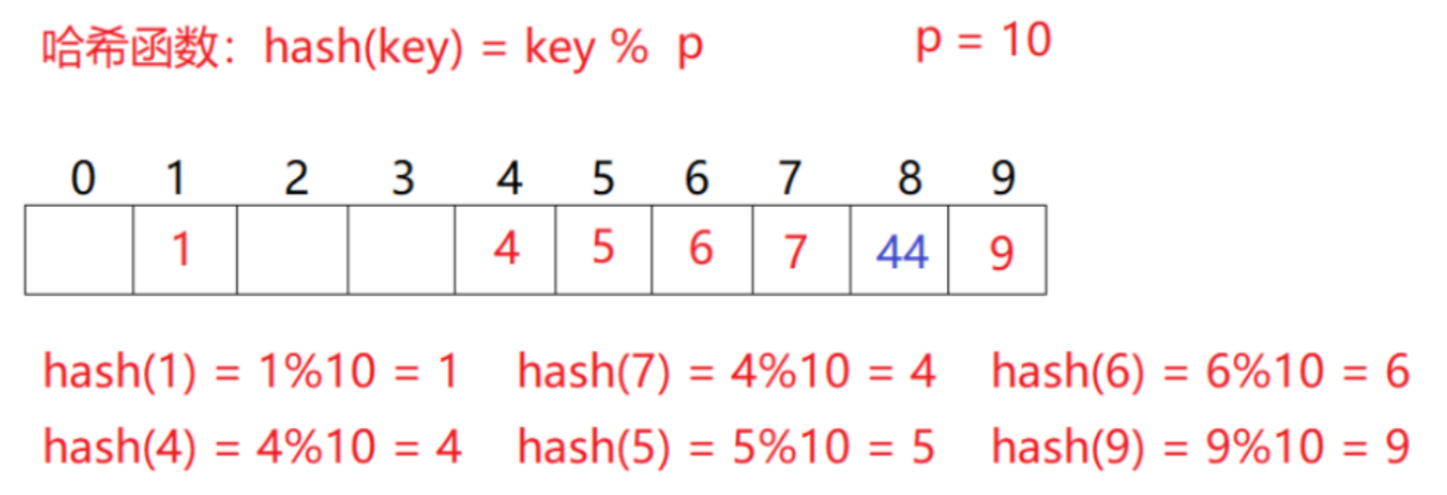
对于两个数据元素的关键字,其 key1 != key2,但是存在 key1 % p == key2 % p,此时 key1 和key2 就会被映射到 hash Table 中相同的位置。

假设我们将需要存的数n,存的索引值 = n % 10
现在需要将20存入该表中,计算出的键值为0,但是该位置已经有数据了,即发生了哈希冲突.
此时:不同关键字通过相同的哈希函数计算处相同的哈希地址,该种现象称为哈希冲突或哈希碰撞。
把具有不同关键码而具有相同哈希地址的数据元素称为 “同义词” 。
发生哈希冲突该如何处理呢?
2. 哈希函数
引起哈希冲突的一个原因在于:哈希函数设计的不够合理。
哈希函数的设计原则:
- 哈希函数的定义域必须包括需要存储的全部关键码,而如果散列表允许有 m 个地址时,其值域必须在 0 到 m-1 之间。
- 哈希函数计算出来的地址能均匀的分布在整个空间中。
- 哈希函数设计应足够简单。
常见的两种哈希函数
① 直接定址法
取关键字的某个线性函数为散列地址:hash(key) = A * Key + B
优点:简单、均匀
缺点:需要事先知道关键字的分布情况
使用场景:适合查找比较小且连续的情况。
题目举例:387. 字符串中的第一个唯一字符
②除留余数法(常用)
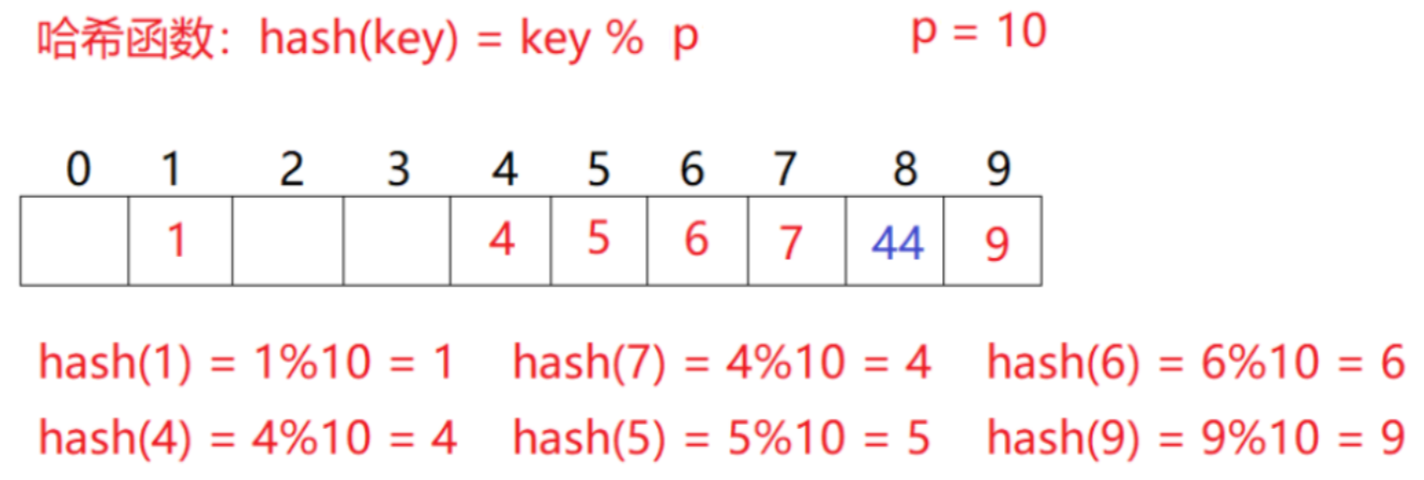
设散列表中允许的地址数为 m ,取一个不大于 m ,但最接近或者等于 m 的质数 p 作为除数,按照哈希函数:hash(key) = key % p(p<= m),将关键码转化为哈希地址。
就是以下这种方法
3. 负载因子
如果hash的插入,进行映射后如果找不到空位就要一直往后面检测查找空位,所以如果当哈希表中只有一个空位时,插入一个数据的时间复杂度很可能就变成了O(N),所以说再这种情况发生前我们就要对其进行扩容。
那什么情况下进行扩容呢?应该括多大呢?如果是除留余数法,那质数 p又应该是多少呢?
散列表的负载因子定义为:a = 填入表中的元素个数 / 散列表的长度

负载因子越小,冲突的概率越小,空间利用率低
负载因子越大,冲突的概率越大,空间利用率高。
而库中的做法是,负载因子如果大于0.7,就进行扩容。
二.闭散列
闭散列:也叫开放地址法,当发生哈希冲突时,如果哈希表未被装满,说明在哈希表中必然还有空位置,那么可以把 key 存放到冲突位置中的"下一个"空位置中去。
寻找下一个空位置方式有线性探测和二次探测,接下来我们结合理论并实现一下。
1. 线性探测
线性探测:从发生冲突的位置开始,依次向后探测,直到寻找到下一个空位置即可。
结构定义:
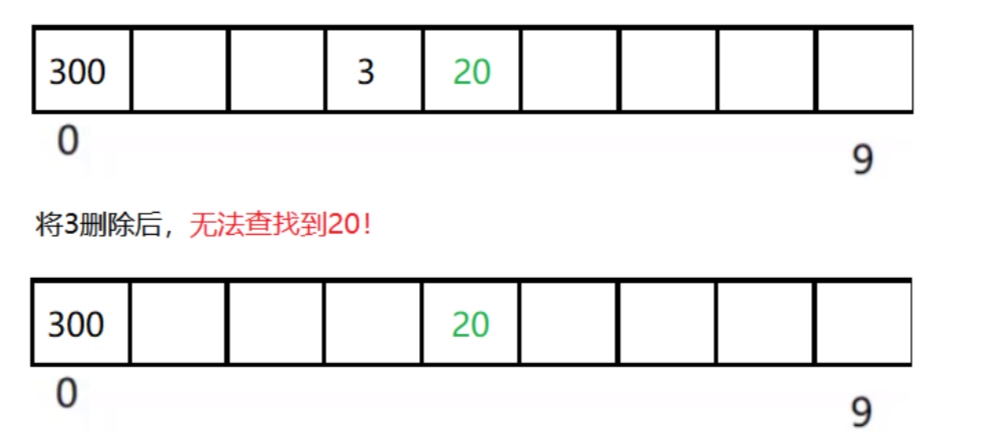
首先我们定义结构,我们定义每个位置有三种状态{存在,空位,删除},一个位置要么是已经有数据了,要么是没有数据,为什么有一个删除状态呢?
如果出现下面这种情况,20在3的后面进行插入,将3删除后,20便无法查找到,所以我们会再添加一个删除状态,防止以下这种情况发生。
使用一个数组进行存储,其中每一个位置位HashDate类型,该类型中会记录当前位置的状态。再添加一个size变量,用于记录当前存储的有效数据个数。结构如下:
enum State {EMPTY,EXIST,DELETE}; //每个位置有三种状态
template<class K,class V>
struct HashDate
{
pair<K, V> _kv;
State _state;
};
template<class K,class V>
class HashTable
{
public:
//成员函数:
private:
vector<HashDate<K, V>> _table;
size_t _size=0;
};
2. Insert 插入
- 通过哈希函数(除留余数法)获取待插入元素在哈希表中的位置
- 如果该位置中没有元素则直接插入新元素,如果该位置中有元素发生哈希冲突,使用线性探测找到下一个空位置,插入新元素。
注意事项:
-
确定质数p,我们应该取vector的size()还是capacity()作为质数?
使用size(),因为capacity()是vector开辟的总空间,超过size()的部分是不能直接使用的,只能使用size()以内的空间,而size要通过我们插入数据或resize进行改变。简而言之,vector中超过size(),小于capacity()的部分我们是不能直接访问的,尽管已经开辟。 -
如果线性探测一直探测到 i 下标超过hash_table.size(),我们应该如何做。
如果一直探测超过数组的下标,应该绕回数组的开始处,所以每次 i++ 后,我们可以继续进行取模,如果超过了size(),会自动从数组0下标处开始探测;当然,使用if判断 i 超过size(),超过就置0也是可以的。 -
当装载因子超过0.7之后,我们应该怎么做。
即_size / _table.size() >=7 时,我们要进行扩容,创建一个新哈希表,然后将旧表中的数据拷贝到新表中,此时我们可以复用 Insert 函数,因为新表是不存在扩容问题的,所以会使用 Insert 中插入逻辑的代码,然后将数据全部插入到新表中,最后我们将新表与旧表的进行swap一下,就将新表扩容指向的内容交换给了临时变量,临时变量调用析构函数,自动释放,这样,扩容问题就得到了解决。
bool Insert(const pair<K, V>& kv)
{
//如果 size==0 或装载因子 >=0.7 进行扩容
if (_table.size() == 0 || 10 * _size / _table.size() >= 7)
{
size_t newSize = _table.size() == 0 ? 10 : _table.size() * 2;
HashTable<K, V> newHash;
newHash._table.resize(newSize);
//将旧表中的数据拷贝到新表中 --- 复用Insert继续拷贝数据
for (auto e : _table)
{
if (e._state == EXIST)
{
newHash.Insert(e._kv);
}
}
//进行交换 newHash自动调用其析构函数
_table.swap(newHash._table);
}
size_t hashi = kv.first % _table.size();
while (_table[hashi]._state == EXIST) //如果存在数据就一直往后找
{
hashi++;
//如果hashi++超过size(),需要绕回数组的开始
hashi %= _table.size();
}
//找到位置,插入数据
_table[hashi]._kv = kv;
_table[hashi]._state = EXIST;
++_size;
return true;
}
注意,如果插入的是负数,会发生整形提升,int类型会转变为我们的size_t 类型,此时负数再进行取模,就可以得到一个合法的映射位置,也可以被查找的。
接下来还有一个问题,如果数据发生冗余怎么办。就是如果插入的是已经存在的值,应该如何处理呢?
3. Find 查找
所以我们可以在插入之前编写一个find函数,如果该数据存在,则不进行插入
HashDate<K, V>* Find(const K& key)
{
//判断表为空的情况
if (_table.size() == 0)
return nullptr;
size_t hashi = key % _table.size();
while (_table[hashi]._state != EMPTY)
{
//如果找到key了,并且状态不是DELETE
if (_table[hashi]._kv.first == key && _table[hashi]._state != DELETE)
{
return &_table[hashi];
}
hashi++;
//如果超过表的长度,则除以表的大小,让其回到表头。
hashi %= _table.size();
}
return nullptr;
}
此时有一个问题, 我们的循环是_state !=EMPT,如果遍历重回到起点,这些遍历到的数据_state都为EMPTY,就可能导致死循环,所以我们还要保存起始位置的状态,如果重回起点则也返回false(当然,这是一种非常极端的情况,但是会出现)。
4. Erase删除
删除的思路非常简单,如果find查找到该值,直接将其对应的state改为DELETE即可。
bool Erase(const K& key)
{
HashDate<K, V>* ret = Find(key);
if (ret)
{
ret->_state = DELETE;
--_size;
return true;
}
return false;
}
5. 插入复杂类型
那如果我们想实现一个统计次数的哈希表,则 key 值是string类型的怎么办呢?string类型或字符串类型是无法被取模的。那再如果我们想插入一个自己定义的复杂类型呢?
我们先来看看STL库中是如何解决这个问题的。

所以我们要编写默认的hash取key的仿函数作为缺省参数。
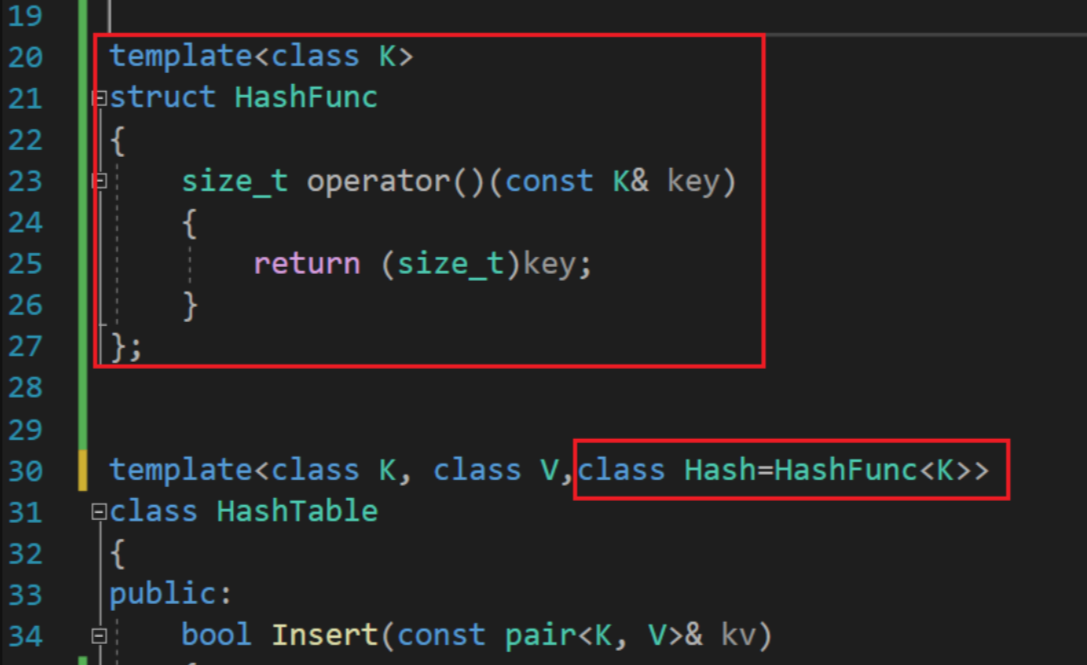
但是在库中的unordered_map并不需要我们自己传入仿函数,因为string是一个挺常见的类型,库中使用了模板的特化,对string类型进行了特殊处理,我们接下来也将其进行改动为特化的形式。
template<>
struct HashFunc<string>
{
size_t operator()(const string& key)
{
size_t val = 0;
for (auto ch : key)
val = val * 131 + ch;
return val;
}
};
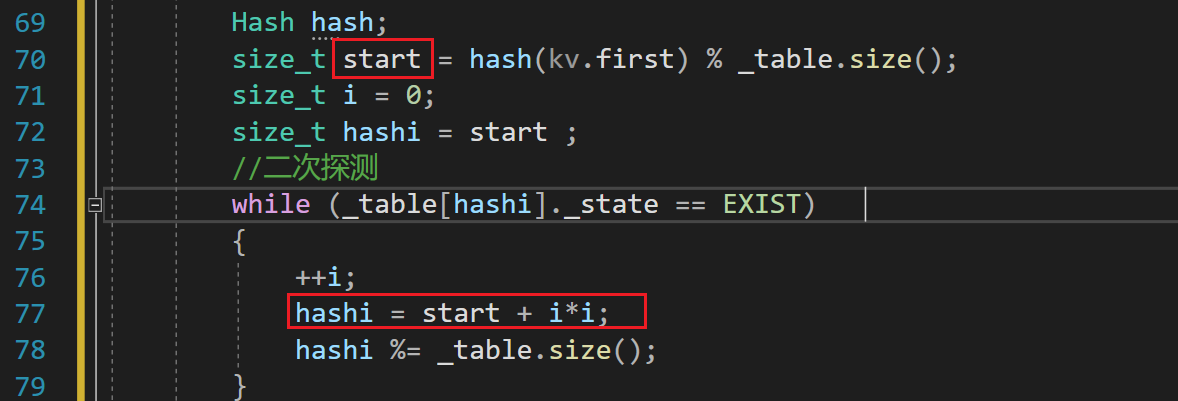
6. 二次探测
二次探测不是指探测两次,而是 i 的指数方进行探测。
如下是使用线性探测和二次探测插入同一组数据的插入结果,如下:
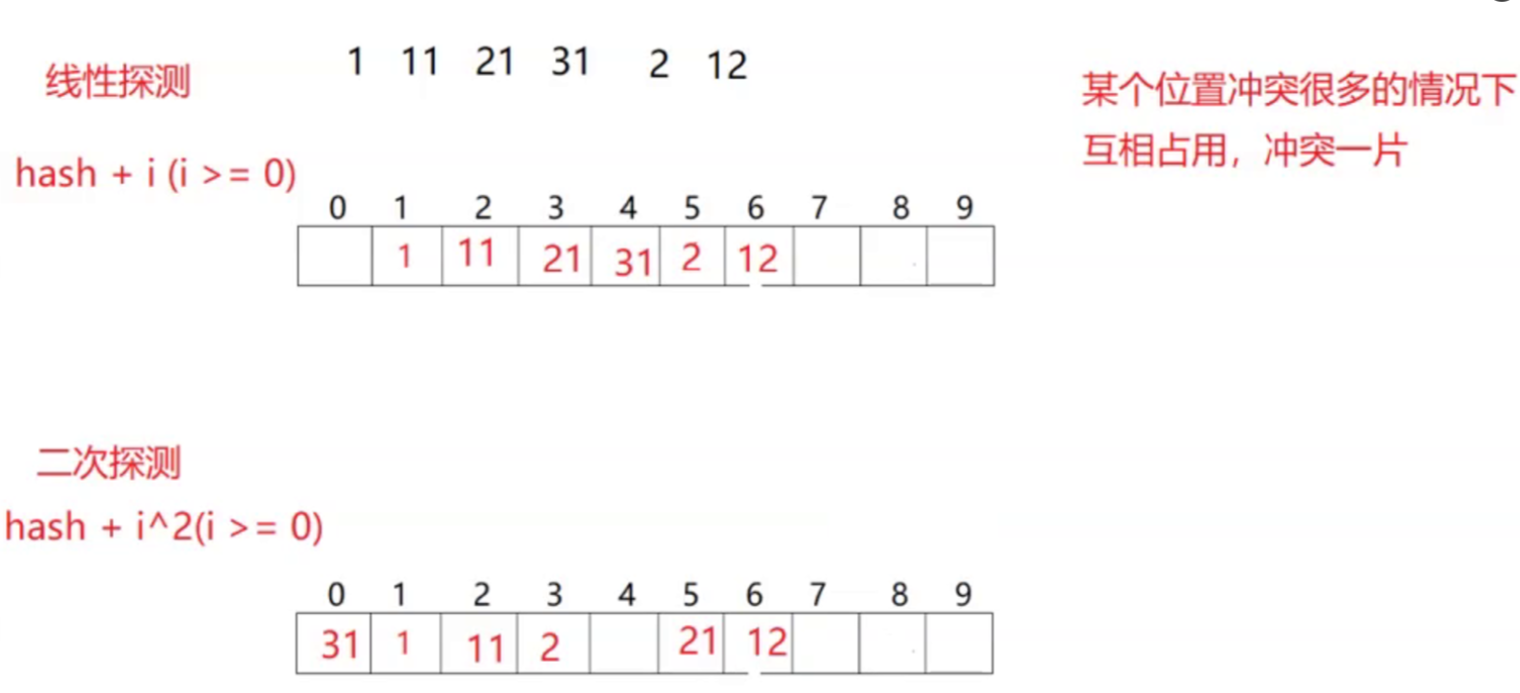
然后我们在线性探测的方式上进行改动:
三.源码与测试用例
1. hash
enum State { EMPTY, EXIST, DELETE }; //每个位置有三种状态
template<class K, class V>
struct HashDate
{
pair<K, V> _kv;
State _state= EMPTY;
};
template<class K>
struct HashFunc
{
size_t operator()(const K& key)
{
return (size_t)key;
}
};
template<>
struct HashFunc<string>
{
size_t operator()(const string& key)
{
size_t val = 0;
for (auto ch : key)
val = val * 131 + ch;
return val;
}
};
template<class K, class V,class Hash=HashFunc<K>>
class HashTable
{
public:
bool Insert(const pair<K, V>& kv)
{
//如果表中已经存在该数据
if (Find(kv.first)) return false;
//如果 size==0 或装载因子 >=0.7 进行扩容
if (_table.size() == 0 || 10 * _size / _table.size() >= 7)
{
size_t newSize = _table.size() == 0 ? 10 : _table.size() * 2;
HashTable<K, V, Hash> newHash;
newHash._table.resize(newSize);
//将旧表中的数据拷贝到新表中 --- 复用Insert继续拷贝数据
for (auto e : _table)
{
if (e._state == EXIST)
{
newHash.Insert(e._kv);
}
}
//进行交换 newHash自动调用其析构函数
_table.swap(newHash._table);
}
Hash hash;
size_t hashi = hash(kv.first) % _table.size();
while (_table[hashi]._state == EXIST) //如果存在数据就一直往后找
{
hashi++;
//如果hashi++超过size(),需要绕回数组的开始
hashi %= _table.size();
}
//找到位置,插入数据
_table[hashi]._kv = kv;
_table[hashi]._state = EXIST;
++_size;
return true;
}
HashDate<K,V>* Find(const K& key)
{
//判断表为空的情况
if (_table.size() == 0)
return nullptr;
Hash hash;
size_t hashi = hash(key) % _table.size();
while (_table[hashi]._state != EMPTY)
{
//如果找到key了,并且状态不是DELETE
if (_table[hashi]._kv.first == key && _table[hashi]._state!=DELETE)
{
return &_table[hashi];
}
hashi++;
//如果超过表的长度,则除以表的大小,让其回到表头。
hashi %= _table.size();
}
return nullptr;
}
bool Erase(const K& key)
{
HashDate<K, V>* ret = Find(key);
if (ret)
{
ret->_state = DELETE;
--_size;
return true;
}
return false;
}
void Print()
{
for(int i=0;i< _table.size();i++)
{
if (_table[i]._state == EXIST)
cout <<"i:" <<i<<" [" << _table[i]._kv.first << " " << _table[i]._kv.second <<"]" << endl;
}
}
private:
vector<HashDate<K, V>> _table;
size_t _size=0;
};
2. 测试用例
void test_hash01()
{
HashTable<int, int> Hash;
int a[] = { 1,11,4,15,26,7};
for (auto e : a)
{
Hash.Insert(make_pair(e, e));
}
Hash.Print();
cout << endl;
}
void test_hash02()
{
HashTable<int, int> Hash;
int a[] = { 1,11,4,15,26,7,13,5,34,9 };
for (auto e : a)
{
Hash.Insert(make_pair(e, e));
}
Hash.Print();
cout << endl;
}
void test_hash03()
{
HashTable<int, int> Hash;
int a[] = { 1,11,4,15,26,7,13,5,34,9 };
for (auto e : a)
{
Hash.Insert(make_pair(e, e));
}
Hash.Print();
cout << endl<<"find:"<<endl;
cout << (Hash.Find(11)->_kv).first << endl;
cout << (Hash.Find(4)->_kv).first << endl;
cout << (Hash.Find(5)->_kv).first << endl;
cout << (Hash.Find(34)->_kv).first << endl;
cout << "Erase:" << endl;
Hash.Erase(11);
cout << Hash.Find(11) << endl;
}
void test_hash04_string()
{
string arr[] = { "苹果","西瓜","菠萝","草莓","菠萝","草莓" ,"菠萝","草莓"
, "西瓜", "菠萝", "草莓", "西瓜", "菠萝", "草莓","苹果" };
HashTable<string,int> countHT;
for (auto& str : arr)
{
auto ptr = countHT.Find(str);
if (ptr)
ptr->_kv.second++;
else
countHT.Insert({ str,1 });
}
countHT.Print();
}
void test_hash05_string()
{
HashFunc<string> hash;
cout << hash({ "abc" }) << endl;
cout << hash({ "bac" }) << endl;
cout << hash({ "cba" }) << endl;
cout << hash({ "bbb" }) << endl;
}
本文到此结束, 码文不易, 还请多多支持哦 ! ! !
















 1113
1113











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











