






0. 简介
激光雷达的畸变矫正是一个非常重要的工作。由于扫描式激光雷达传感器需要有限的时间来创建点云,所以一次扫描过程中传感器的运动会导致点云发生畸变,这种现象被称为运动畸变或者卷帘快门。运动畸变校正方法已经存在,但是它们依赖于外部测量或者多次激光雷达扫描上的贝叶斯滤波。《Correcting Motion Distortion for LIDAR HD-Map Localization》一文提出了一种新型算法,其执行快照处理以实现运动畸变校正。快照处理是将当前激光雷达扫描配准到参考图像,而不使用外部传感器或者贝叶斯滤波,其对于高精(HD)地图定位尤其重要。本文方法称为速度校正迭代紧凑椭球变换(VICET),其扩展了众所周知的正态分布变化(NDT)算法,以联合求解两个激光雷达扫描帧之间的6自由度(DOF)刚体变换以及描述当前激光雷达扫描帧内畸变的一组6DOF运动状态。通过实验,我们证明,当在无畸变的高精地图中定位带有畸变的原始激光雷达扫描帧时,VICET相比NDT或者迭代最近点(ICP)算法,实现了明显更高的精度。相应的代码目前在Github上已经开源了。
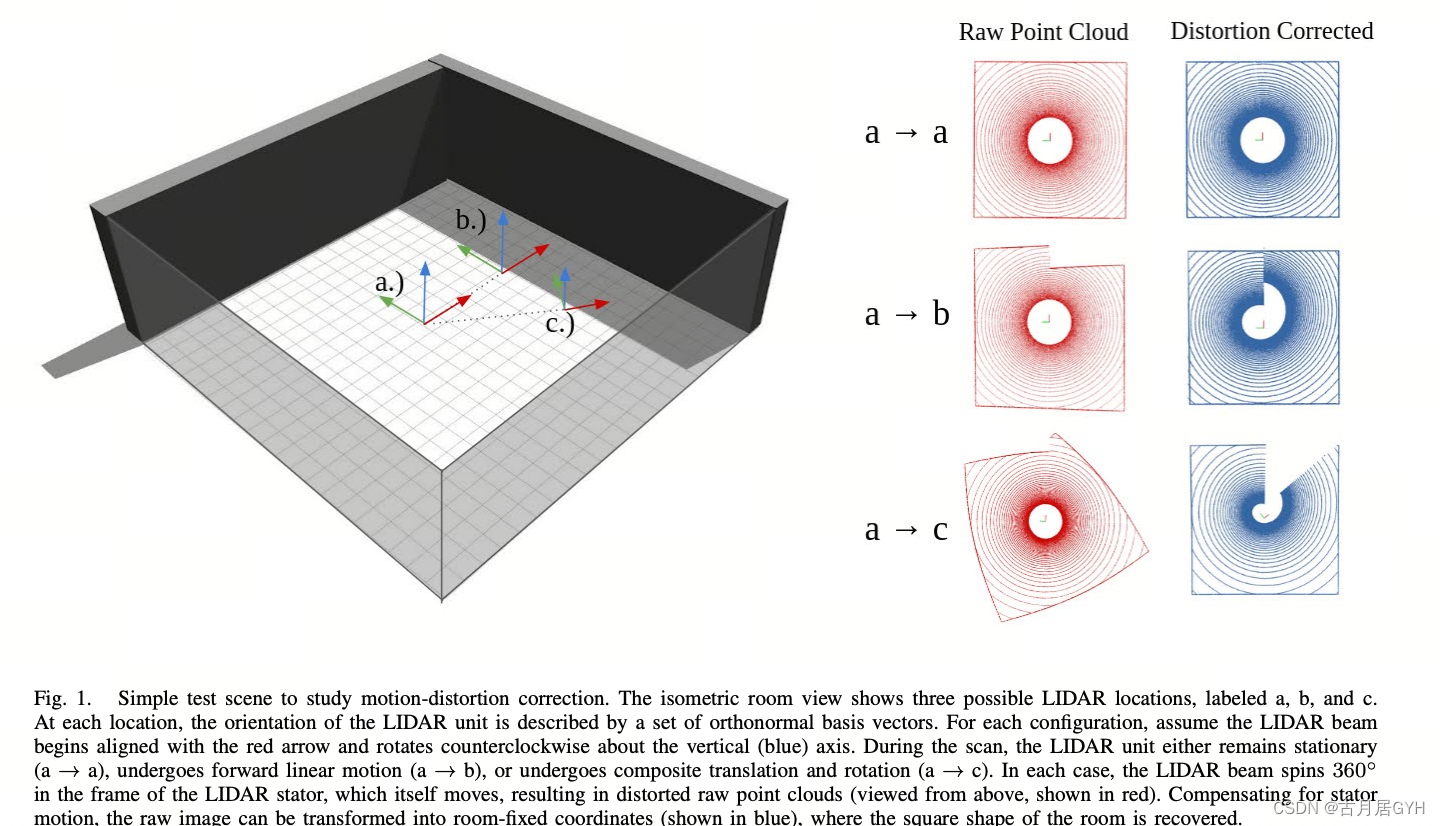
图1. 用于研究运动畸变校正的简单测试场景。等距房间视图显示了三个可能的激光雷达位置,标记为a、b和c。
在每个位置上,激光雷达单元的方向由一组正交基向量描述。对于每种配置,假设激光雷达束从红色箭头开始与垂直(蓝色)轴逆时针旋转。在扫描过程中,激光雷达单元可以保持静止(a → a),前向线性运动(a → b),或进行复合平移和旋转(a → c)。在每种情况下,激光雷达束在激光雷达定子的参考系中旋转360度,而定子本身也在移动,导致畸变的原始点云(从上方视角看,用红色表示)。通过补偿定子运动,可以将原始图像转换为固定于房间的坐标系(用蓝色表示),从而恢复出房间的正方形形状。
1. 主要贡献
本文的主要贡献如下:
1)本文提出了一种新的基于激光雷达的畸变校正方法,该方法不依赖于外部测量或者估计器,因此可以进行快照处理,仅使用参考图像和当前激光雷达扫描帧进行匹配。这对于基于地图的导航尤其重要,其中通过将单帧扫描与先前存在的地图进行匹配来估计瞬时位置;
2)本文还提出了一种能够对测量不确定性进行有意义预测的新方法,鲁棒误差边界的计算是自动驾驶乘用车等安全关键导航系统的一个重要方面;
3)本文通过加入运动畸变补偿来改进NDT算法,以提高配准精度。
2. 算法表述
本节开发了一个快照最小二乘误差(MSE)估计器,通过与无畸变参考地图进行比较,推断出当前激光雷达扫描的相对姿态(平移和旋转)和运动畸变参数。我们将该算法称为速度校正迭代紧致椭球变换(VICET)。
点击经典文献阅读之--VICET(激光雷达运动畸变校正) - 古月居 可查看全文















 1124
1124











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









