






Linux驱动之I2C,设备树读取AP3216C环境光模块
开发板:STM32MP157A
板上系统:Linux 5.10.6
一、查看原理图
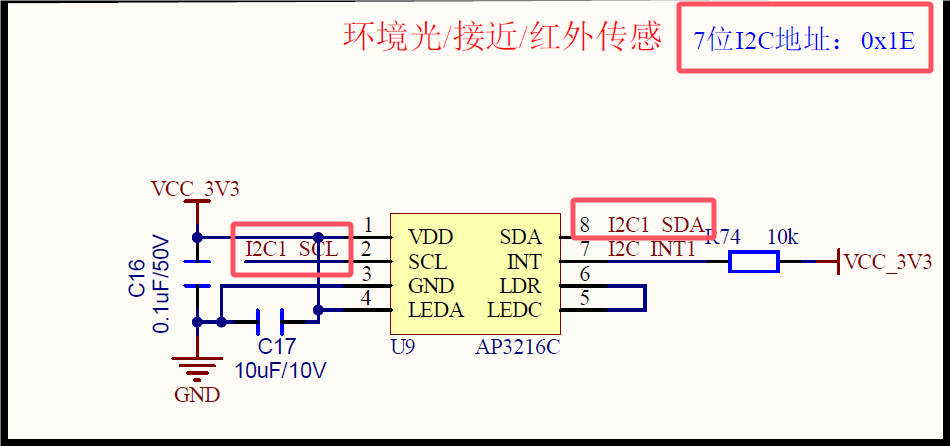
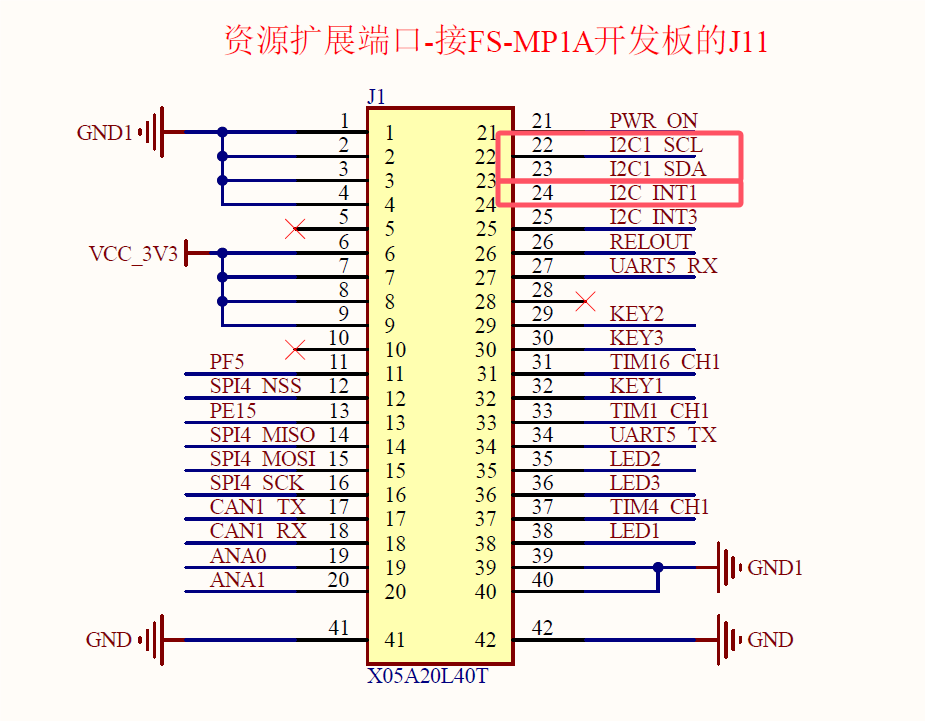
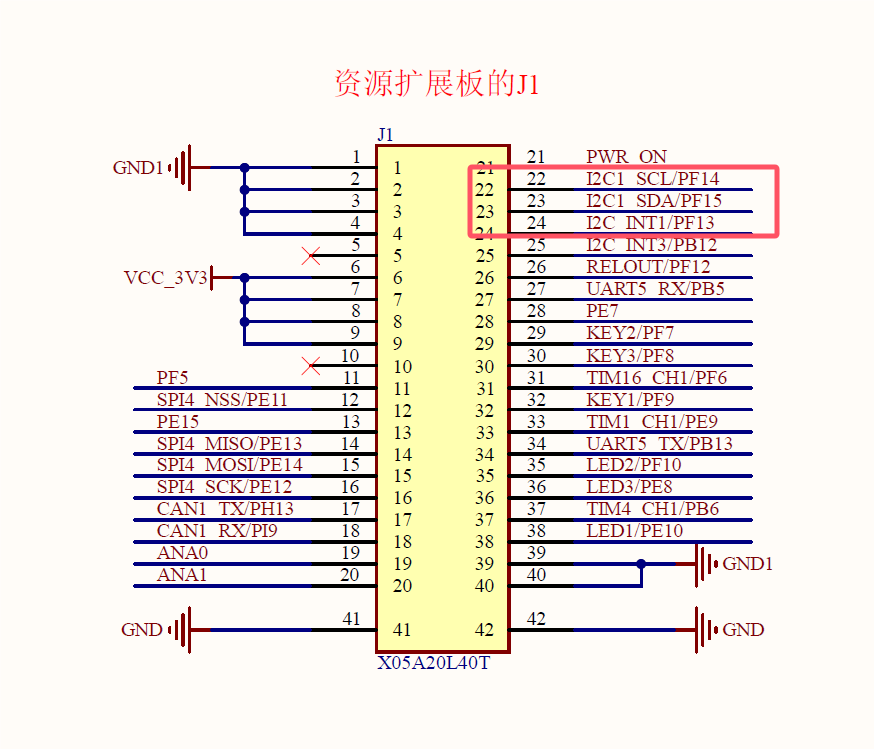
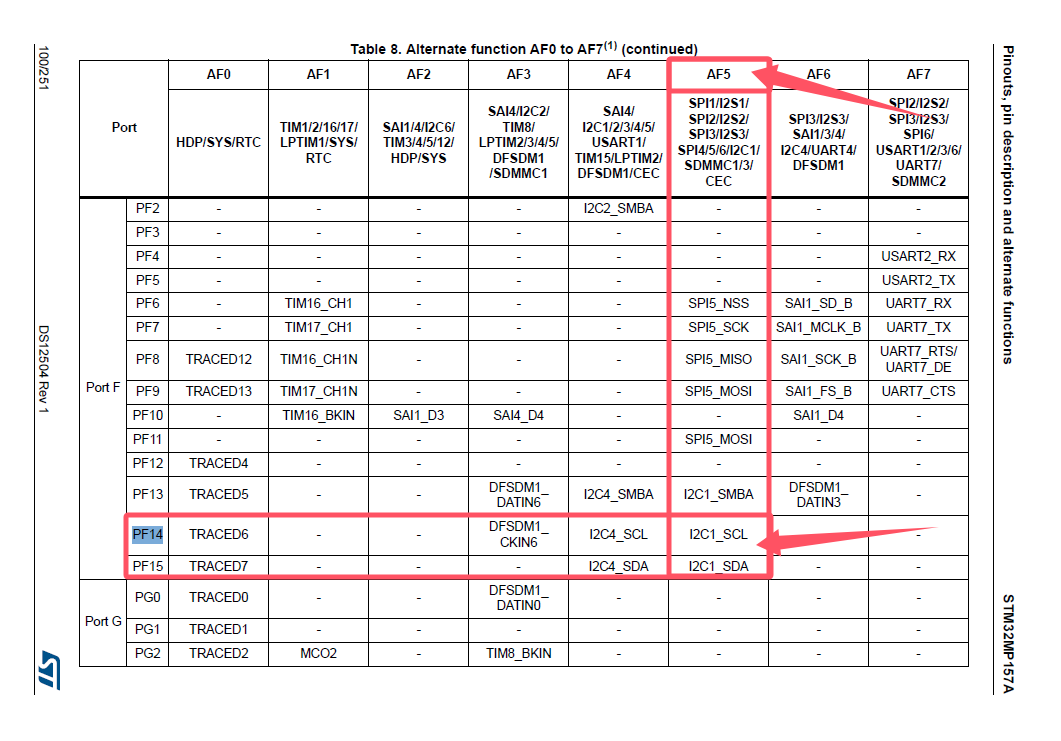
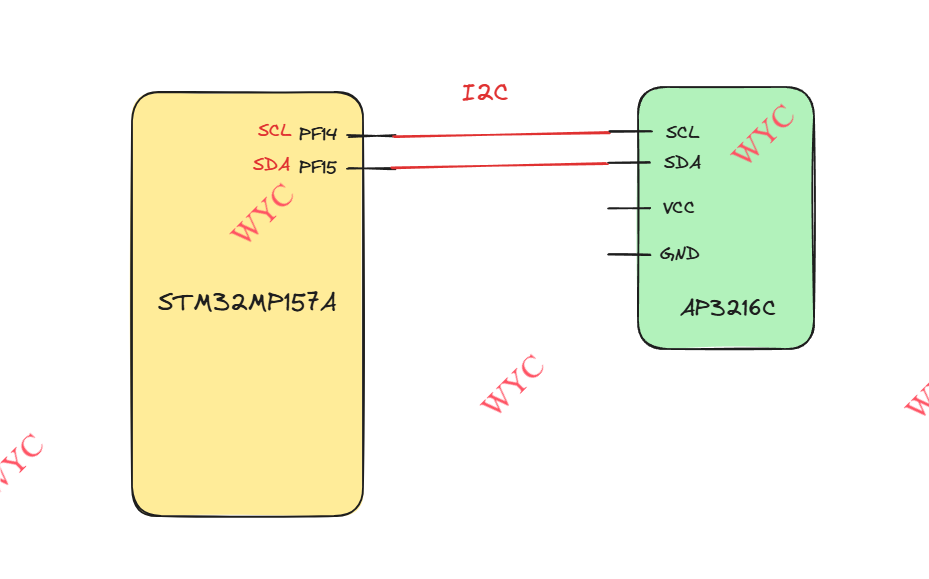
//上述可以得知:AP3216C的从机地址为0x1E,使用i2c通信,时钟线和数据线分别接到PF15,PF14引脚。
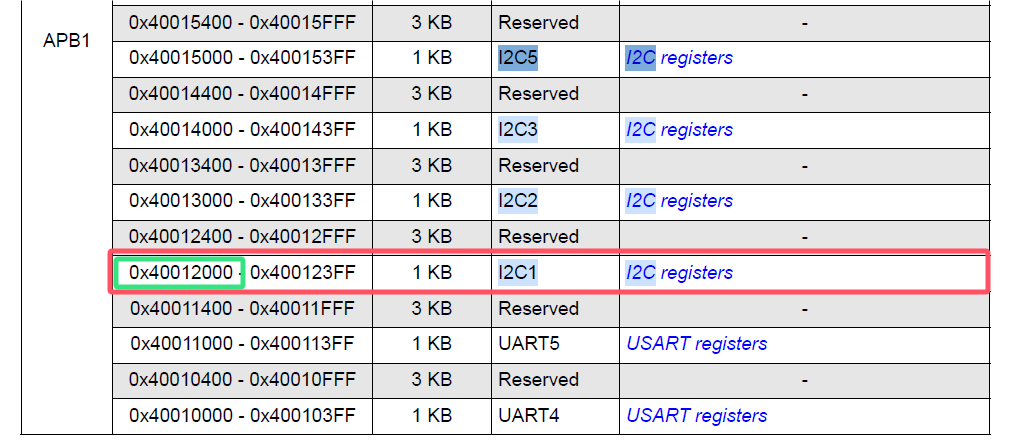
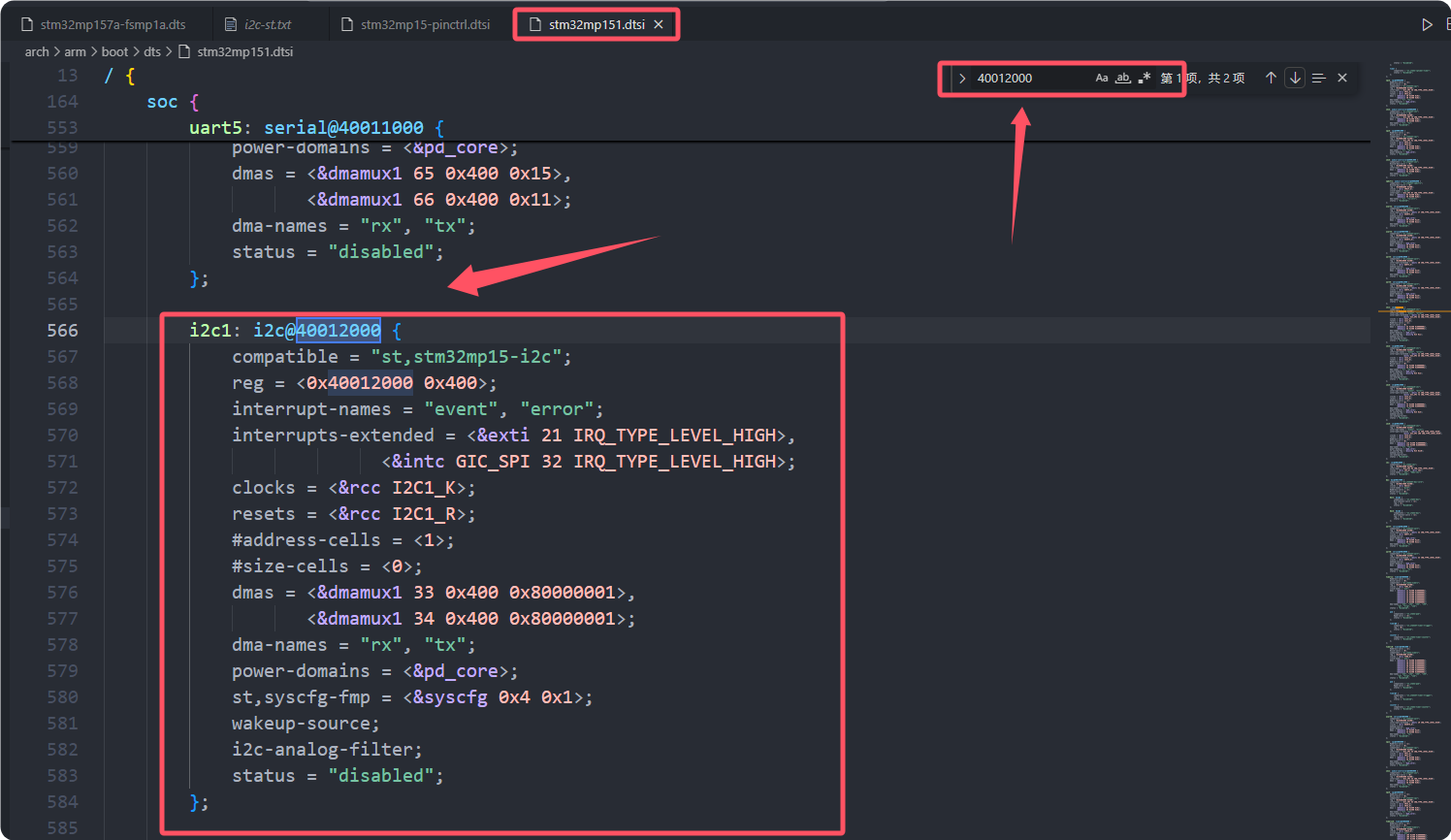
查看I2C1的内存映射:
查看PF14,PF15的i2c复用:
二、写设备树节点
1、画原理图
2、查看Linux设备树官方文档
路径:
linux-5.10.61/Documentation/devicetree/bindings/i2c
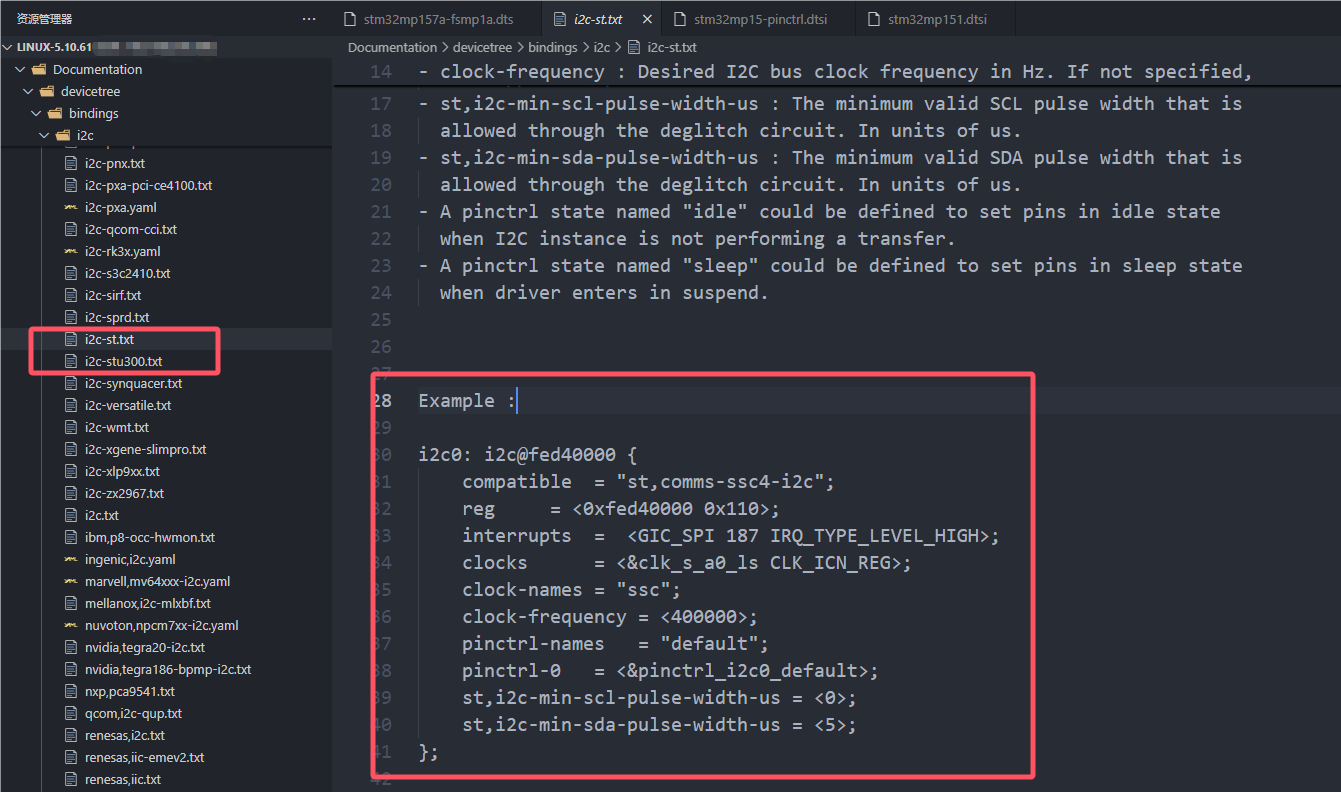
仿照案例寻找我们需要的信息:
利用我们找到的I2C1对应的映射地址去寻找:
根据我们在手册中找到的PF14,PF15复用为AF5来寻找我们的I2C复用配置:’
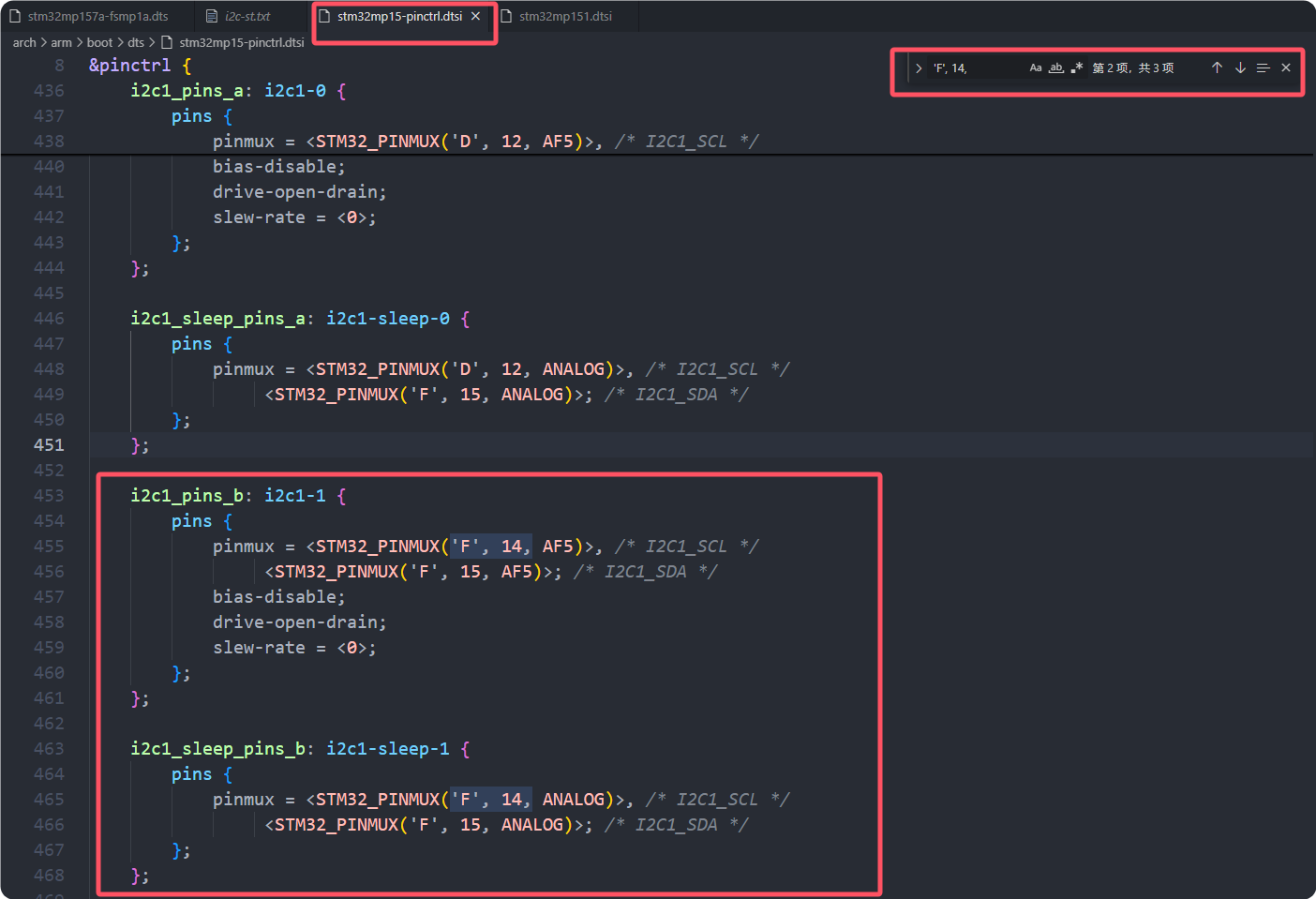
3、写自己的设备树节点
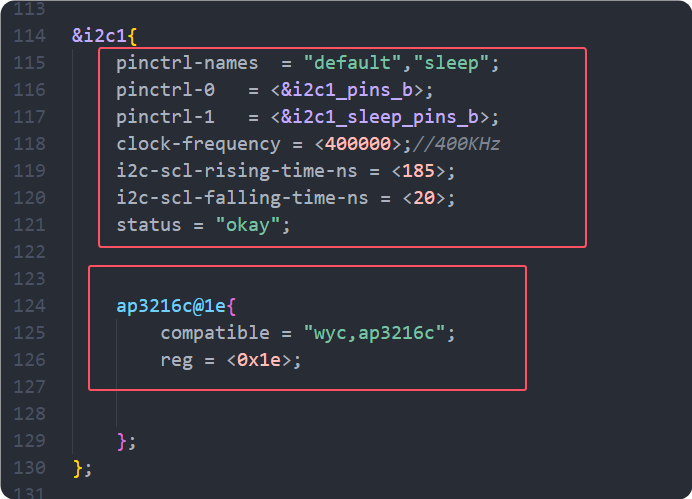
(一)、将i2c1节点引用到我们的设备树中
(二)、配置引脚信息
(三)、修改配置
三、写驱动
我这里只是用到了AP3216c模块的光照强度测量功能,为了方便我快速验证成果,我这里并没有用到此模块的中断功能。
头文件:AP3216c.h
#ifndef __AP3216C_H__
#define __AP3216C_H__
#include <linux/module.h>
#include <linux/init.h>
#include <linux/i2c.h>
#include <linux/cdev.h>
#include <linux/fs.h>
#include <linux/device.h>
#include <linux/errno.h>
#include <linux/err.h>
#define AP3216_I2C_ADDRESS 0x1e // 从机地址: 0x1e
#endif
驱动程序:ap3216_dev.c
#include "../include/AP3216c.h"
#include <linux/uaccess.h>
#define NAME "ap3216c_dev"
// 全局变量定义
struct cdev *ap3216_cdev = NULL; // 字符设备结构体指针
struct class *cls = NULL; // 设备类指针
struct device *dev = NULL; // 设备指针
struct i2c_client *gclient = NULL; // I2C客户端指针
// 函数:ap3216c_write_cmd
// 作用:向AP3216C传输写命令
// 参数:
// reg - 要写入的寄存器地址
// cmd - 要写入的数据
// 返回值:成功返回0,失败返回错误码
int ap3216c_write_cmd(u8 reg, u8 cmd)
{
int ret = 0;
u8 buf[2] = {reg, cmd}; // 数据缓冲区
struct i2c_msg msg = {
.addr = AP3216_I2C_ADDRESS, // AP3216C的I2C地址
.flags = 0, // 标志为0表示写操作
.len = 2, // 缓冲区长度
.buf = buf, // 缓冲区指针
};
ret = i2c_transfer(gclient->adapter, &msg, 1); // 传输I2C消息
if (ret != 1)
{
printk("i2c_transfer_write error\n");
return -EAGAIN; // 返回错误码
}
return 0;
}
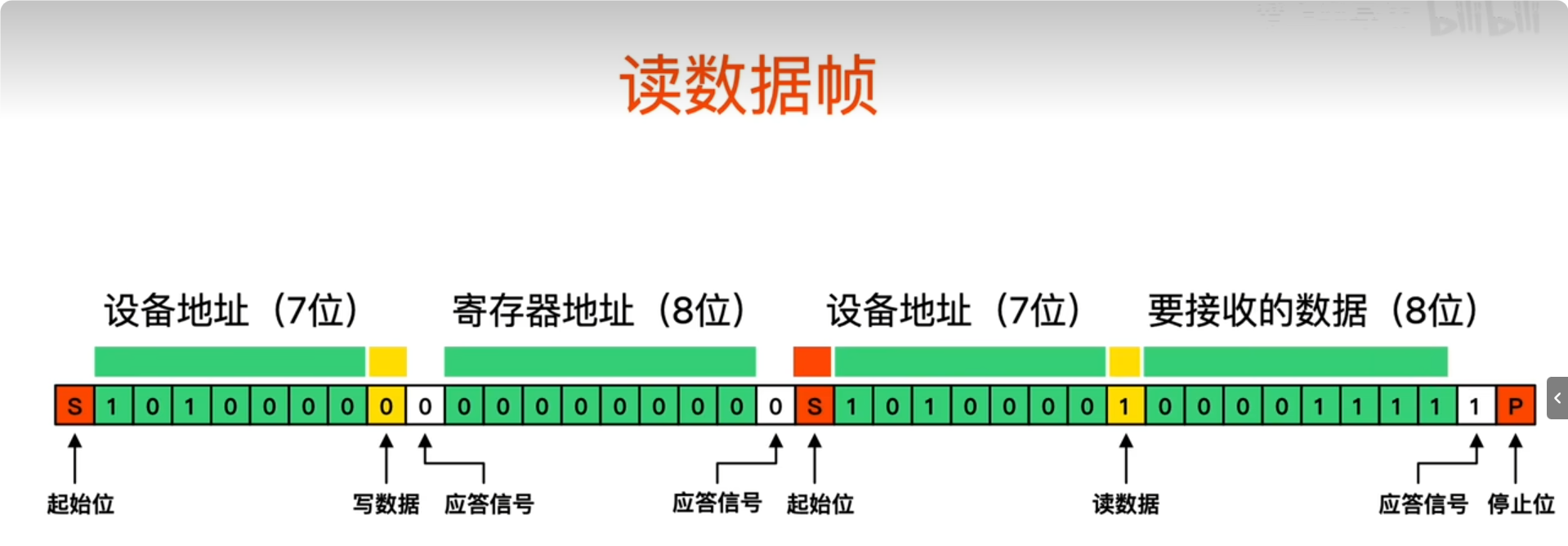
// 函数:ap3216c_read_data
// 作用:从AP3216C读取数据
// 参数:
// reg - 要读取的寄存器地址
// data - 读取到的数据缓冲区
// size - 要读取的数据长度
// 返回值:成功返回0,失败返回错误码
int ap3216c_read_data(u8 reg, unsigned char *data, size_t size)
{
int ret = 0;
struct i2c_msg msg[2] = {
[0] = {
.addr = AP3216_I2C_ADDRESS, // AP3216C的I2C地址
.flags = 0, // 标志为0表示写操作
.len = 1, // 寄存器地址长度
.buf = ®, // 寄存器地址指针
},
[1] = {
.addr = AP3216_I2C_ADDRESS, // AP3216C的I2C地址
.flags = 1, // 标志为1表示读操作
.len = size, // 要读取的数据长度
.buf = data, // 数据缓冲区指针
}
};
// 先发送寄存器地址,再读取数据
ret = i2c_transfer(gclient->adapter, msg, 2);
if (ret != 2)
{
printk("i2c_transfer_read error\n");
return -EAGAIN; // 返回错误码
}
return 0;
}
// 函数:ap3126_ALS_init
// 作用:初始化AP3216C的ALS(Ambient Light Sensor)功能
// 返回值:成功返回0,失败返回错误码
int ap3126_ALS_init(void)
{
int ret = 0;
short a = 0;
char buf_data[2] = {0};
// 启用ALS功能
ret = ap3216c_write_cmd(0x00, 0x01);
if (ret)
return -1;
// 读取ALS数据低位
ret = ap3216c_read_data(0x0c, &buf_data[0], sizeof(char));
if (ret)
return -1;
// 读取ALS数据高位
ret = ap3216c_read_data(0x0D, &buf_data[1], sizeof(char));
if (ret)
return -1;
// 组合高低位数据
a = (buf_data[1] << 8) + buf_data[0];
printk("光照强度为:%d\n", a);
return 0;
}
// 函数:ap3216_open
// 作用:设备打开函数
// 返回值:成功返回0
int ap3216_open(struct inode *node, struct file *file)
{
printk("%s,%s,%d\n", __FILE__, __func__, __LINE__);
return 0;
}
// 函数:ap3216_release
// 作用:设备关闭函数
// 返回值:成功返回0
int ap3216_release(struct inode *node, struct file *file)
{
printk("%s,%s,%d\n", __FILE__, __func__, __LINE__);
return 0;
}
// 函数:ap3216_ioctl
// 作用:设备IO控制函数
// 参数:
// cmd - 控制命令
// arg - 命令参数
// 返回值:成功返回0
long ap3216_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
printk("%s,%s,%d\n", __FILE__, __func__, __LINE__);
return 0;
}
// 函数:ap3216_write
// 作用:设备写函数
// 返回值:成功返回0
ssize_t ap3216_write(struct file *file, const char *ubuf, size_t size, loff_t *offs)
{
printk("%s,%s,%d\n", __FILE__, __func__, __LINE__);
return 0;
}
// 函数:ap3216_read
// 作用:设备读函数
// 返回值:成功返回读取的数据长度,失败返回错误码
ssize_t ap3216_read(struct file *file, char *ubuf, size_t size, loff_t *offs)
{
int ret = 0;
short a = 0;
char buf_data[2] = {0};
printk("%s,%s,%d\n", __FILE__, __func__, __LINE__);
// 读取ALS数据低位
ret = ap3216c_read_data(0x0c, &buf_data[0], sizeof(char));
if (ret)
return -1;
// 读取ALS数据高位
ret = ap3216c_read_data(0x0D, &buf_data[1], sizeof(char));
if (ret)
return -1;
// 组合高低位数据
a = (buf_data[1] << 8) + buf_data[0];
printk("光照强度为:%d\n", a);
// 将数据复制到用户空间
ret = copy_to_user(ubuf, buf_data, size);
if (ret != 0)
{
printk("copy_to_user error \n");
return -1;
}
return 0;
}
// 文件操作结构体
struct file_operations fops = {
.open = ap3216_open,
.release = ap3216_release,
.unlocked_ioctl = ap3216_ioctl,
.write = ap3216_write,
.read = ap3216_read,
};
// 函数:ap3216_probe
// 作用:设备探测函数
// 返回值:成功返回0,失败返回错误码
int ap3216_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int ret = 0;
printk("%s,%s,%d\n", __FILE__, __func__, __LINE__);
gclient = client;
// 分配字符设备结构体
ap3216_cdev = cdev_alloc();
// 初始化字符设备
cdev_init(ap3216_cdev, &fops);
// 注册设备号
ret = alloc_chrdev_region(&(ap3216_cdev->dev), 0, 1, NAME);
if (ret < 0)
{
printk("alloc_chrdev_region error\n");
goto NO_1;
}
// 添加字符设备
ret = cdev_add(ap3216_cdev, ap3216_cdev->dev, 1);
if (ret < 0)
{
printk("cdev_add error\n");
goto NO_2;
}
// 创建设备类
cls = class_create(THIS_MODULE, NAME);
if (IS_ERR(cls))
{
ret = PTR_ERR(cls);
goto NO_3;
}
// 创建设备节点
dev = device_create(cls, NULL, ap3216_cdev->dev, NULL, NAME);
if (IS_ERR(dev))
{
ret = PTR_ERR(dev);
goto NO_4;
}
// 初始化ALS功能
ret = ap3126_ALS_init();
if (ret)
{
printk("ap3126_ALS_init error\n");
goto NO_5;
}
return 0;
NO_5:
device_destroy(cls, dev->devt);
NO_4:
class_destroy(cls);
NO_3:
cdev_del(ap3216_cdev);
NO_2:
unregister_chrdev_region(ap3216_cdev->dev, 1);
NO_1:
return ret;
}
// 函数:ap3216_remove
// 作用:设备移除函数
// 返回值:成功返回0
int ap3216_remove(struct i2c_client *client)
{
printk("%s,%s,%d\n", __FILE__, __func__, __LINE__);
device_destroy(cls, dev->devt);
class_destroy(cls);
cdev_del(ap3216_cdev);
unregister_chrdev_region(ap3216_cdev->dev, 1);
return 0;
}
// 设备树匹配表
struct of_device_id ap3216_table[] = {
[0] = {.compatible = "wyc,ap3216c"},
{}
};
// I2C驱动结构体
struct i2c_driver iic_dev = {
.probe = ap3216_probe,
.remove = ap3216_remove,
.driver = {
.name = "ap3216c",
.of_match_table = ap3216_table,
}
};
// 模块初始化函数
int __init ap3216_init(void)
{
int ret;
printk("%s,%s,%d\n", __FILE__, __func__, __LINE__);
ret = i2c_register_driver(THIS_MODULE, &iic_dev);
if (ret < 0)
{
printk("i2c_register_driver error\n");
return ret;
}
return 0;
}
// 模块退出函数
void __exit ap3216_exit(void)
{
printk("%s,%s,%d\n", __FILE__, __func__, __LINE__);
i2c_del_driver(&iic_dev);
}
// 注册模块初始化和退出函数
module_init(ap3216_init);
module_exit(ap3216_exit);
// 模块许可声明
MODULE_LICENSE("GPL");
应用程序:ap3216c_main.c
#include <stdio.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
int main(int argc, const char *argv[])
{
int fd = 0;
int ret = 0;
char ubuf[2] = {0};
int light_intensity = 0;
fd = open("/dev/ap3216c_dev", O_RDWR);
if (fd < 0)
{
perror("open error");
return -1;
}
while (1)
{
sleep(3);
ret = read(fd, ubuf, sizeof(ubuf));
if (ret < 0)
{
perror("read open ");
return -1;
}
light_intensity = (ubuf[1] << 8) + ubuf[0];
printf("main光照强度为:%d\n", light_intensity);
}
return 0;
}

















 2885
2885

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









