







序列决策问题(Sequential Decision-Making Problem)是强化学习(Reinforcement Learning, RL)的核心研究内容,其核心思想是:智能体(Agent)需要在连续的时间步骤中,通过与环境(Environment)的交互,选择一系列动作(Actions),以最大化长期累积奖励(Cumulative Reward)。
1. 序列决策问题的定义
在序列决策问题中:
- 动态性:每个动作的选择不仅影响当前奖励,还会影响后续状态(State)和未来的奖励。
- 目标:找到一种策略(Policy),使得从初始状态开始,所有时间步的期望累积奖励最大化。
- 数学形式:通常建模为马尔可夫决策过程(Markov Decision Process, MDP),这是RL的标准框架。
2. 关键要素
序列决策问题通过马尔可夫决策过程(MDP)形式化,包含以下要素:
- 状态空间(State Space, S):环境可能的所有状态集合。
- 动作空间(Action Space, A):智能体可执行的动作集合。
- 转移函数(Transition Function, T):T(s,a,s′)=P(s′∣s,a),表示在状态s执行动作a后转移到状态s′的概率。
- 奖励函数(Reward Function, R):R(s,a,s′)表示从状态s执行动作a转移到s′获得的即时奖励。
- 折扣因子(γ∈[0,1)):用于权衡当前奖励与未来奖励的重要性。
3. 策略(Policy)与价值函数(Value Function)
- 策略(π):定义智能体在状态s下选择动作的规则。
- 确定性策略:π(s)→a。
- 随机策略:π(a∣s)表示在状态s选择动作a的概率。
- 价值函数:
- 状态价值函数(Vπ(s)):在状态s下遵循策略π的期望累积奖励。
- 动作价值函数(Qπ(s,a)):在状态s执行动作a后遵循策略π的期望累积奖励。
4. 核心挑战
序列决策问题的难点在于:
-
探索与利用(Exploration vs. Exploitation):
- 探索:尝试新动作以发现潜在的高奖励路径。
- 利用:根据已有知识选择当前最优动作。
- 平衡两者是RL算法的核心挑战(例如通过ε-greedy策略或UCB方法)。
-
延迟奖励(Delayed Reward):
当前动作的影响可能在多个时间步后才显现(例如围棋中某一步可能决定最终胜负)。 -
高维状态空间:
实际应用中状态可能是高维的(如图像输入),需借助深度神经网络进行函数逼近。
5. 解决方法
5.1 基于值函数的方法(Value-Based Methods)
- Q-Learning:
- 通过更新动作价值函数Q(s,a)逼近最优策略。
- 贝尔曼方程(Bellman Equation)是理论基础:
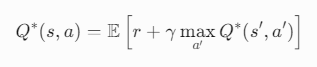
- 深度Q网络(DQN)使用神经网络拟合Q函数。
5.2 基于策略的方法(Policy-Based Methods)
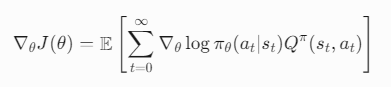
- 策略梯度(Policy Gradient):
- 直接优化策略πθ(a∣s)的参数θ。
- 通过梯度上升最大化期望累积奖励:
5.3 模型基方法(Model-Based Methods)
- 学习环境模型:
- 估计转移函数T和奖励函数R,通过规划(Planning)生成策略。
- 适用于数据稀缺或安全性要求高的场景(如机器人控制)。
6. 实际应用
- 游戏:Atari游戏(DQN)、围棋(AlphaGo)、德州扑克(Pluribus)。
- 机器人:机械臂控制(Model-Based RL)、自动驾驶(在线学习)。
- 资源管理:智能电网调度、计算资源分配。
7. 当前研究方向
- 泛化性:如何使策略在未见过的环境中有效。
- 样本效率:减少与环境交互的次数。
- 多智能体系统:多个智能体协作或竞争。
总结
序列决策问题是强化学习的核心,其复杂性源于动态性、延迟奖励和高维状态空间。通过结合深度学习(如DQN、策略梯度)和经典RL理论(如贝尔曼方程),深度强化学习(Deep RL)在复杂任务中取得了突破性进展。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









