







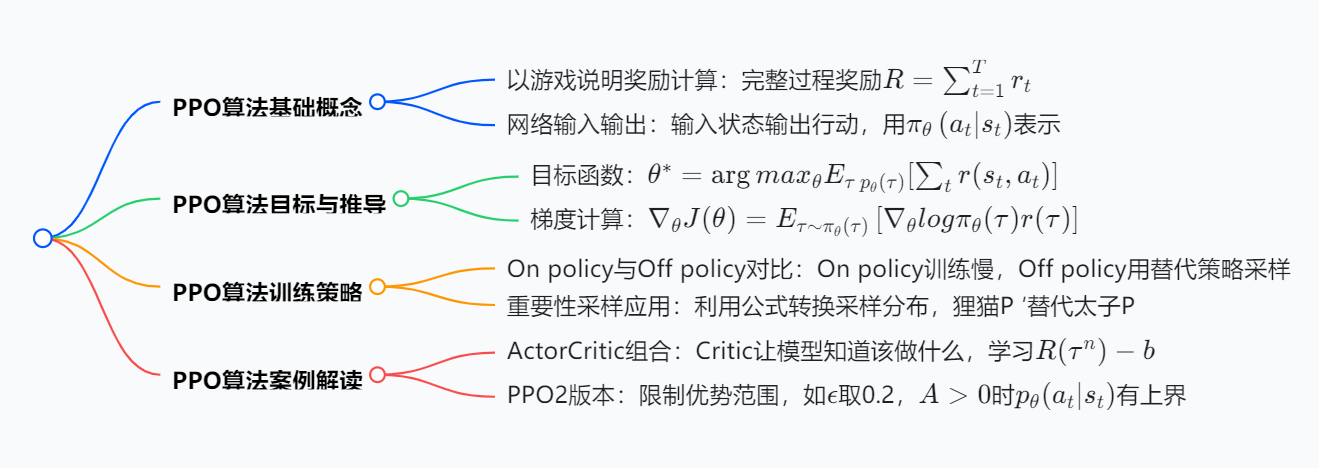
PPO 原理通俗讲解
想象你在训练一只狗学技能,比如接飞盘。强化学习的目标是让狗通过试错找到最佳策略,而PPO(近端策略优化)就是一种让训练更稳定、更高效的“驯狗秘籍”。以下是它的核心思想:
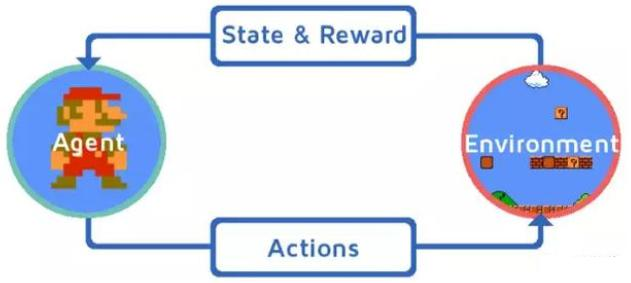
1. 基础设定:策略与奖励
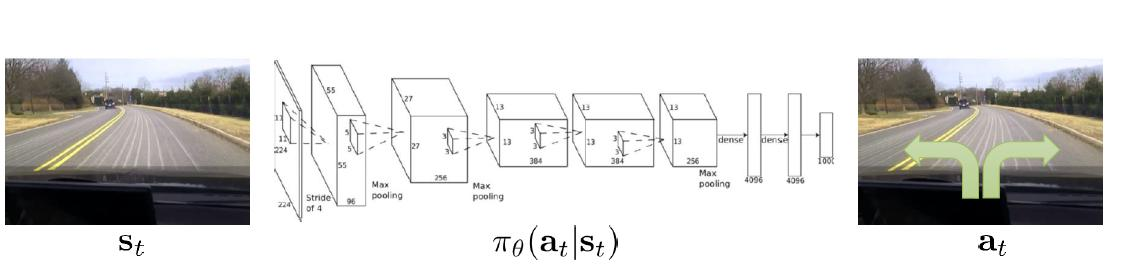
- 策略(Policy):狗的大脑,决定了它在不同情况下该做什么动作(比如跳多高、跑多快)。我们用神经网络(Actor)模拟这个策略。
- 奖励(Reward):每次动作后,主人给出反馈。接到飞盘奖励+10,没接到-5。目标是让狗最大化长期累积奖励。
2. 传统策略梯度的问题
- 直接更新策略:如果狗某次跳得很高接到了飞盘,传统方法会让它更频繁地跳高。但问题来了:
- 步子太大容易翻车:如果某次跳高成功是运气好,下次策略可能改得太激进,导致后续表现崩盘。
- 数据浪费:每更新一次策略,就要重新试错收集数据,效率低下。
3. PPO的改进:限制策略更新的幅度
PPO的核心思想是:“小步快跑,别浪”。每次更新策略时,确保新策略和旧策略的差距不能太大,避免翻车。具体实现方式有两种:
方法一:KL散度约束(PPO1)
- KL散度:衡量新旧策略的差异程度,类似“新旧动作的相似度”。
- 更新规则:在优化时,强制新旧策略的KL散度不超过某个阈值(比如0.01)。相当于告诉狗:“你可以改进动作,但别改得亲妈都不认识。”
方法二:概率比剪裁(PPO2,更常用)
- 概率比:新策略选择某个动作的概率 / 旧策略选择该动作的概率。
- 如果概率比接近1,说明新旧策略对这个动作的偏好差不多。
- 如果概率比远大于1,说明新策略更偏好这个动作。
- 剪裁操作:强制概率比在区间
[1-ε, 1+ε](比如ε=0.2)。相当于说:- 如果某个动作特别好,最多让它的概率比旧策略高20%;如果特别差,最多低20%。
- 避免某个动作的概率被无限放大或缩小,保持更新稳定。
4. 数据复用:重要性采样
- 问题:传统方法每更新一次策略,就要重新试错,效率低。
- 解决方案:用旧策略收集的数据训练新策略,但通过重要性权重(即概率比)修正数据分布差异。
- 例如:旧策略有10%概率跳高,新策略变成20%,则跳高动作的权重为2(20%/10%)。
- 但PPO2会通过剪裁限制权重在
[0.8, 1.2]之间,避免某个动作的权重过大导致训练不稳定。
5. Actor-Critic 搭档
PPO通常结合两种网络:
- Actor(演员):负责选择动作(狗的跳高策略)。
- Critic(评论家):评估当前状态的价值(比如:当前位置接飞盘的潜力有多大)。
- Critic的作用是提供更精细的反馈,帮助Actor判断哪些动作长期来看更好,而不仅仅是看单次奖励。
6. PPO的优势总结
- 稳定训练:限制策略更新幅度,避免“一步错步步错”。
- 高效复用数据:通过重要性采样,旧数据也能多次利用。
- 通用性强:适用于连续动作(如机器人控制)和离散动作(如游戏AI)。
举个栗子 🌰
假设狗当前策略是“看到飞盘跳50cm高”,PPO的更新过程如下:
- 收集数据:用当前策略试跳10次,记录哪些动作成功接到飞盘。
- 评估优势:Critic会分析,跳55cm可能比50cm更好(比如飞盘飞得更高时)。
- 限制更新:允许新策略调整为“跳55cm”,但不允许突然改成“跳100cm”(概率比剪裁在0.8~1.2之间)。
- 重复优化:用新策略继续试跳,逐步逼近最佳高度。
一句话理解PPO
“小步改进旧策略,数据复用不浪费,剪裁限制别作死,ActorCritic好搭配。”
公式
1. 目标函数与期望奖励
公式:
解释:
目标是找到参数 θ,使得从策略采样的轨迹 的期望总奖励最大。由于策略和环境具有随机性,需通过期望值评估平均性能。
:是我们要寻找的最优策略参数。它能使策略
(由参数
决定的策略 )获得最大的期望总奖励。
:这是一个求使函数取最大值时参数值的操作符。意思是在所有可能的参数
中,找到能让后面期望项最大的那个
。
:表示对从策略
采样得到的轨迹
求期望。由于策略和环境都有随机性,每次采样得到的轨迹不同,通过求期望来评估策略的平均性能。
:是沿着轨迹
,对每个时间步 t 的即时奖励
进行求和,得到一条轨迹的总奖励。
通过蒙特卡洛采样近似计算
因为直接求期望比较困难,所以采用蒙特卡洛采样来近似。
N 是采样的轨迹数,通过多次采样不同轨迹来近似期望。
T 是单条轨迹的步数 。对每条轨迹上每个时间步的奖励求和,再对 N 条轨迹的奖励和求平均,以此来近似期望奖励 。
2. 策略梯度推导
公式:
:是目标函数
关于参数
的梯度。它指示了参数
朝哪个方向更新能使目标函数增大。
:同样是对从策略
采样得到的轨迹
求期望。
:对每个时间步上动作概率的对数求梯度并累加。利用对数概率技巧
转换而来,这样便于计算和分析策略的变化。
:一条轨迹上的总奖励,它作为权重,表明哪些时间步上策略的变化对总奖励影响大,就更值得去调整。
推导关键步骤:
对数概率技巧: ,将对策略
本身求梯度转换为对其对数求梯度,在数学计算和分析上更方便,因为对数函数的导数形式相对简单,便于后续处理。
梯度转换为期望形式:把策略梯度表示为对轨迹求期望的形式,这样符合策略在随机环境下的特性,从概率角度来描述策略变化对奖励的影响。
分解轨迹概率:,将轨迹的概率分解为起始状态概率、每个时间步动作概率和状态转移概率的乘积。
取对数后 ,方便计算关于动作概率的梯度,因为常数项number求导为0 ,最终梯度就只依赖动作概率的梯度加权求和。
3. 基线(Baseline)减方差
公式:
解释:
:表示第 i 条轨迹的总奖励。
:是所有 N 条轨迹的平均奖励,作为基线。
从梯度计算公式中减去基线 b ,目的是保留动作相对于平均水平的优势。比如某个动作带来的奖励高于平均奖励, 为正,会促使策略往增加该动作概率的方向更新;反之则促使减少概率。同时,这种方式能降低梯度估计的方差,使训练过程更稳定,因为减去基线后,减少了奖励波动对梯度估计的影响。
4. On-policy 与 Off-policy
- On-policy:含义是使用当前正在优化的策略
与环境进行交互,产生的数据仅用于一次策略更新。比如在训练一个智能体玩游戏时,智能体按照当前策略去玩游戏,收集到的游戏过程数据只用来更新这一次策略,下次更新策略时需要重新用当前策略去和环境交互收集新数据。这种方式的优点是策略更新直接基于当前策略产生的数据,比较 “纯粹” ,但缺点是数据利用率低,每次更新都需要重新收集数据,训练效率不高。
- Off-policy:使用一个旧策略
来生成数据,然后通过重要性采样技术对这些数据进行处理,以便能够重复利用这些数据来更新当前要优化的策略。重要性采样公式
这里 p(x) 是目标分布(当前策略对应的分布 ), Q(x) 是行为分布(旧策略对应的分布 )。在策略梯度中的应用公式
通过计算新旧策略下轨迹的概率比值,来修正旧策略数据用于更新当前策略时的偏差,从而实现数据的重复利用,提高训练效率。
重要性采样公式:
应用到策略梯度:
5. KL 散度约束与 PPO2 剪裁
目标函数约束:
在近端策略优化中,为了防止策略更新幅度过大导致训练不稳定,引入了新旧策略的KL散度约束。KL散度用于衡量两个概率分布(这里是新旧策略对应的动作概率分布 )之间的差异。要求新旧策略的KL散度小于阈值,如果更新后的策略与旧策略差异过大,可能会使智能体的行为突然改变,导致性能下降甚至训练失败。
PPO2 目标函数:
解释:
- 优势函数
:由Critic网络评估得到,它表示在状态
下采取动作
相对于基线(比如状态价值
)的优势程度。如果优势函数值为正,说明该动作相对较好;为负则相对较
- 剪裁操作:限制重要性权重在 [1−ϵ,1+ϵ] 之间,避免因概率比过大导致梯度爆炸。
6. Actor-Critic 架构
- Actor(策略网络):输出动作概率
,通过梯度上升更新。
- Critic(价值网络):估计状态价值
.
作用:Critic 提供更稳定的评估,帮助 Actor 区分高/低质量动作。
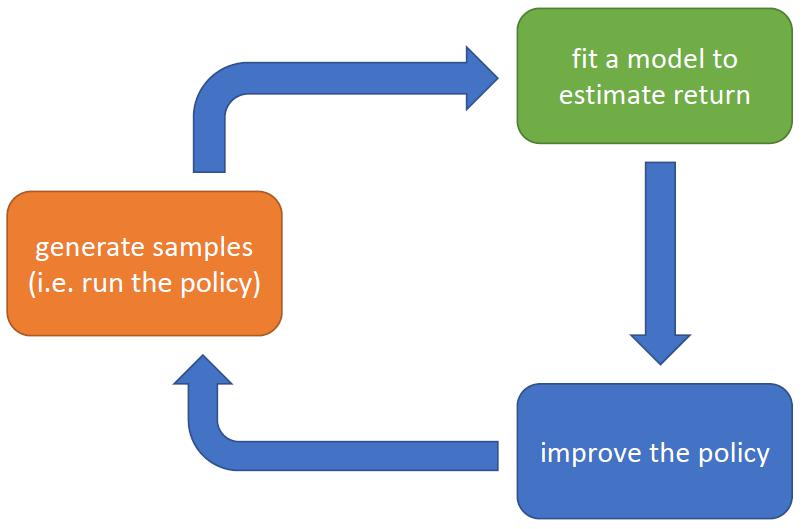
7. PPO 算法流程
- 数据收集:使用当前策略 πθk 与环境交互,生成轨迹数据集。
- 优势估计:Critic 网络计算每个
的优势值
。
- 目标函数优化:通过随机梯度上升最大化 PPO2 目标函数,更新策略参数 θ。
- 迭代更新:重复上述步骤,直到策略收敛。
关键公式总结
| 概念 | 公式 |
|---|---|
| 目标函数 | |
| 策略梯度 | |
| 基线减方差 | |
| 重要性采样 | |
| PPO2 目标函数 |


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









