







一、引言
当前应用较多的车辆通信网络总线主要有CAN 、 LIN、FlexRay 、MOST 、LVDS 等,随着车载电子系统的愈加复杂,不断增加的控制器及接口数量对网络带宽的需求增大,车内控制单元和域之间彼此通信需求也增强。这意味着传统总线将渐渐难以满足信息高速传输的需求,因此引入车载以太网技术:车内电子控制单元通过以太网技术实现相互通信并形成局域网(使用单对双绞线即可实现稳定的双全工通信,且传输速率最高可达到1000Mb/s)。
二、DoIP概述
2.1 DoIP简介
所谓的DoIP其实就是基于以太网的通讯协议对UDS协议的数据进行传输,即Diagnostic communication over Internet Protocol。其本身也是一种协议,规范于ISO13400标准。由于DoIP可以传输大量数据,以及响应速度快,且可以通过以太网进行远程诊断,因此DoIP逐步成为代替传统的CAN等总线方式,成为车载网络诊断的必然趋势。
DoIP在车载领域的应用首先汽车系统的整体框架要能够支持DoIP,正因为车载以太网的快速发展,相较于传统的车载系统,目前的车载系统的整体框架都会加入一层DoIP协议层,在TCP/IP之上。并且为了更好的配合OBD诊断,远程诊断,FOTA等等技术,对整体的车载架构进行了调整,利用swich将MPU,MCU,其它以太网ECU统统通过以太网进行连接,并对外网与内网进行隔离。
简单的说,DoIP能够进行车辆发现,状态查询,路由激活(含安全认证),诊断数据收发,这些内容将在后续进行详细的展开。
DoIP(Diagnostic Communication over Internet Protocol,基于IP的诊断协议)主要用于建立外部测试设备与车载网络之间的诊断连接。常见的应用场景有:
车辆检查和维修
车辆/ECU软件重编程(模块刷新)
车辆/ECU的下线检查和维修
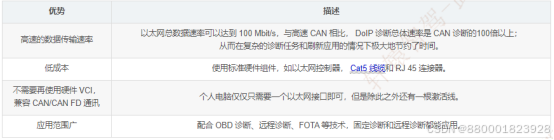
在诊断服务中,DoIP相对于传统的CAN诊断具有以下显著优势:
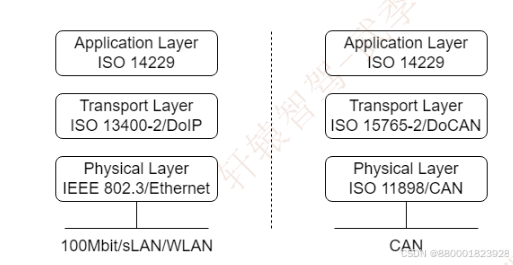
基于DoIP和DoCAN的网络通信在 OSI 网络模型中的大致架构如下所示,单就协议内容来讲,可以把DoIP协议看作传输层的协议:
对应的ISO标准为ISO-13400,分以下四部分:
Part1: General information and use case definition(相关术语+协议的使用场景)
Part2: Transport protocol and network layer services(协议内容的具体定义)
Part3: Wired vehicle interface based on IEEE 802.3(相关硬件设计选型)
Part4: Ethernet-based high-speed data link connector(对应车辆接插件的选型)
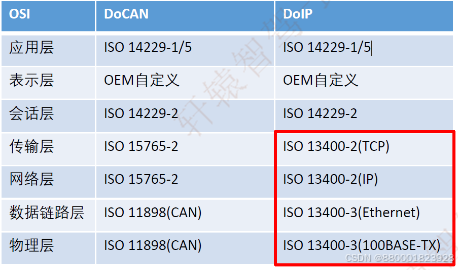
ISO13400 定义的 DoIP 各部分内容在 OSI 网络模型中的架构如下所示:
2.2 相关术语和缩写

三、DoIP通信场景
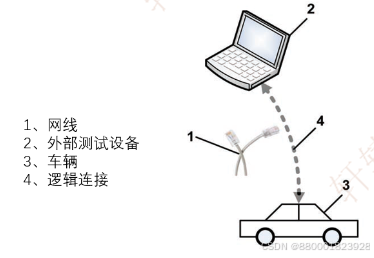
3.1 直接点对点连接
单台车辆与外部设备使用双绞线点对点通信,诊断仪与车辆直连后,可以诊断单车所有DoIP节点,一般用于单车故障诊断或者ECU升级刷写等功能。这种方式意味着在进行诊断通信时,系统不会受到来自其他车辆或设备的干扰。
3.2 通过网络的点对点连接(通过网络连接单台车辆与单一外部测试设备)
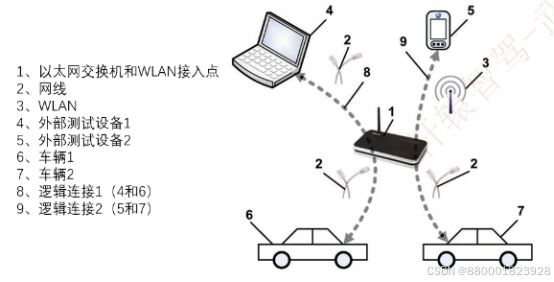
多个车辆和多个外部测试设备被连接到同一个网络,这意味着外部测试设备应有可能识别网络中的车辆,并选择与之建立通信的特定车辆。当然,设备与车辆本身都应具备自动接入到已存在的IP网络的能力。从车辆的角度来看,这意味着车辆应该实现识别机制,并且应该能够处理或拒绝多个连接尝试,因为其他外部测试设备可能会干扰当前建立的通信。
这种通信场景通常发生在车辆连接到现有网络或无线基础设施时,其他车辆和外部测试设备(例如维修车间网络)也使用这些网络或无线基础设施(例如多台车同时在维修店进行检车、维修)。
3.3 单个外部测试设备与多个车辆的网络连接
单诊断仪连接多台车辆的形式一般用于产线上生产监控及ECU刷写等。从车辆的角度来看,这个通信场景与3.2中描述的场景相同。只有外部测试设备
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









