










💯 博客内容:从零带你实现unordered_map
😀 作 者:陈大大陈
🚀 个人简介:一个正在努力学技术的准C++后端工程师,专注基础和实战分享 ,欢迎私信!
💖 欢迎大家:这里是CSDN,我总结知识和写笔记的地方,喜欢的话请三连,有问题请私信 😘
目录
哈希/散列:映射,关键字和另一个值建立一个关联关系。
哈希表/散列表:映射,关键字和储存位置建立一个关联关系。
哈希/散列是一种算法思想,而哈希表/散列表是基于这种算法思想而实现的一种数据结构,这点很容易混淆。
上一篇博客介绍了两个解决哈希冲突的方法,
1.线性探测 hashi+i (i>=0)
2.二次探测 hashi+i^2 (i>=0)
这两种方法都不算是什么灵丹妙药,还是太慢。
最好的方法是下面这个。
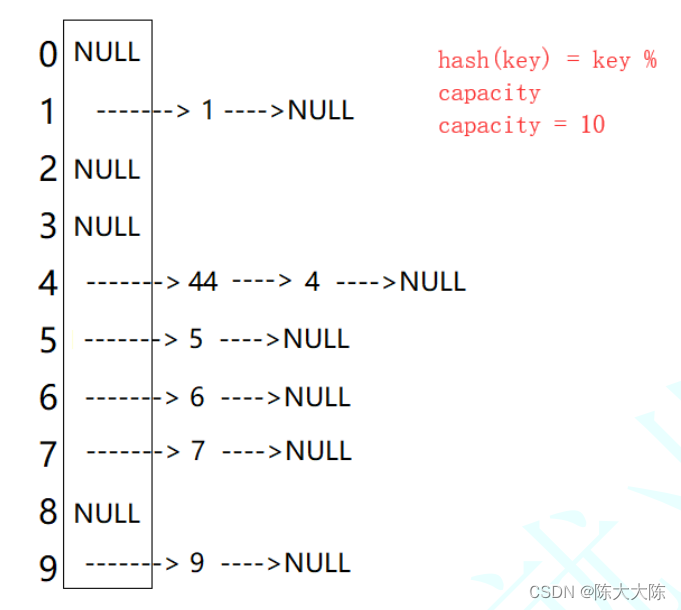
闭散列/哈希桶 拉链法
哈希每一个存的不是唯一的值,而是一个指针数组。
这样一来,key值相同的值都会存到一个指针数组里面,查找就方便了很多。
它的查找直接‘’内部消化‘’,不会影响到别的值。
这样的每一个节点,我们称之为桶。
当一个桶的节点过多时吗,这个桶的存储结构由链表变为红黑树。
平均时间复杂度是O(1)。
当存储的值是string等类型的话,不能直接入表。
要使用仿函数来类型转换。
HashFunc的作用是转成整型值。
直接把字母的ASCII值加起来看行不行。
需要特别注意的是,汉字的ASCII值是负数,存储的时候需要用到特殊的方法。
否则会发生整形提升,简单的两个汉字加起来就能有好几亿。
上篇文章也说过了:
解决哈希冲突 两种常见的方法是:闭散列和开散列
闭散列,也叫开放定址法,当发生哈希冲突时,如果哈希表未被装满,说明在哈希表中必然还有
空位置,那么可以把key存放到冲突位置中的“下一个” 空位置中去。
今天咱们就来提提开散列。
开散列法又叫链地址法(开链法),首先对关键码集合用散列函数计算散列地址,具有相同地
址的关键码归于同一子集合,每一个子集合称为一个桶,各个桶中的元素通过一个单链表链
接起来,各链表的头结点存储在哈希表中。
开散列图示:
开散列代码:
#define _CRT_SECURE_NO_WARNINGS
template<class V>
struct HashBucketNode
{
HashBucketNode(const V& data)
: _pNext(nullptr), _data(data)
{}
HashBucketNode<V>* _pNext;
V _data;
};
template<class V>
class HashBucket
{
typedef HashBucketNode<V> Node;
typedef Node* PNode;
public:
HashBucket(size_t capacity = 3) : _size(0)
{
_ht.resize(GetNextPrime(capacity), nullptr);
}
// 哈希桶中的元素不能重复
PNode* Insert(const V& data)
{
// 确认是否需要扩容。。。
// _CheckCapacity();
// 1. 计算元素所在的桶号
size_t bucketNo = HashFunc(data);
// 2. 检测该元素是否在桶中
PNode pCur = _ht[bucketNo];
while (pCur)
{
if (pCur->_data == data)
return pCur;
pCur = pCur->_pNext;
}
// 3. 插入新元素
pCur = new Node(data);
pCur->_pNext = _ht[bucketNo];
_ht[bucketNo] = pCur;
_size++;
return pCur;
}
// 删除哈希桶中为data的元素(data不会重复),返回删除元素的下一个节点
PNode* Erase(const V& data)
{
size_t bucketNo = HashFunc(data);
PNode pCur = _ht[bucketNo];
PNode pPrev = nullptr, pRet = nullptr;
while (pCur)
{
if (pCur->_data == data)
{
if (pCur == _ht[bucketNo])
_ht[bucketNo] = pCur->_pNext;
else
pPrev->_pNext = pCur->_pNext;
pRet = pCur->_pNext;
delete pCur;
_size--;
return pRet;
}
}
return nullptr;
}
PNode* Find(const V& data);
size_t Size()const;
bool Empty()const;
void Clear();
bool BucketCount()const;
void Swap(HashBucket<V, HF>& ht;
~HashBucket();
private:
size_t HashFunc(const V& data)
{
return data % _ht.capacity();
}
private:
vector<PNode*> _ht;
size_t _size; //哈希表中有效元素的个数
};桶的个数是一定的,随着元素的不断插入,每个桶中元素的个数不断增多,极端情况下,可
能会导致一个桶中链表节点非常多,会影响的哈希表的性能,因此在一定条件下需要对哈希
表进行增容,那该条件怎么确认呢?开散列最好的情况是:每个哈希桶中刚好挂一个节点,
再继续插入元素时,每一次都会发生哈希冲突,因此,在元素个数刚好等于桶的个数时,可
以给哈希表增容。
增容代码:
void _CheckCapacity()
{
size_t bucketCount = BucketCount();
if(_size == bucketCount)
{
HashBucket<V, HF> newHt(bucketCount);
for(size_t bucketIdx = 0; bucketIdx < bucketCount; ++bucketIdx)
{
PNode pCur = _ht[bucketIdx];
while(pCur)
{
// 将该节点从原哈希表中拆出来
_ht[bucketIdx] = pCur->_pNext;
// 将该节点插入到新哈希表中
size_t bucketNo = newHt.HashFunc(pCur->_data);
pCur->_pNext = newHt._ht[bucketNo];
newHt._ht[bucketNo] = pCur;
pCur = _ht[bucketIdx];
}
}
newHt._size = _size;
this->Swap(newHt);
}
}这块东西实在是太多,下篇博客咱们继续实现。

















 697
697











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











