







本项目主控改为ESP32-C3,沿用之前的L298N电机驱动、12.6v 18650电池组、LM7805降压模块的方案。电机改用1:19减速比的,使用130mm车轮,主要考虑越野用途。
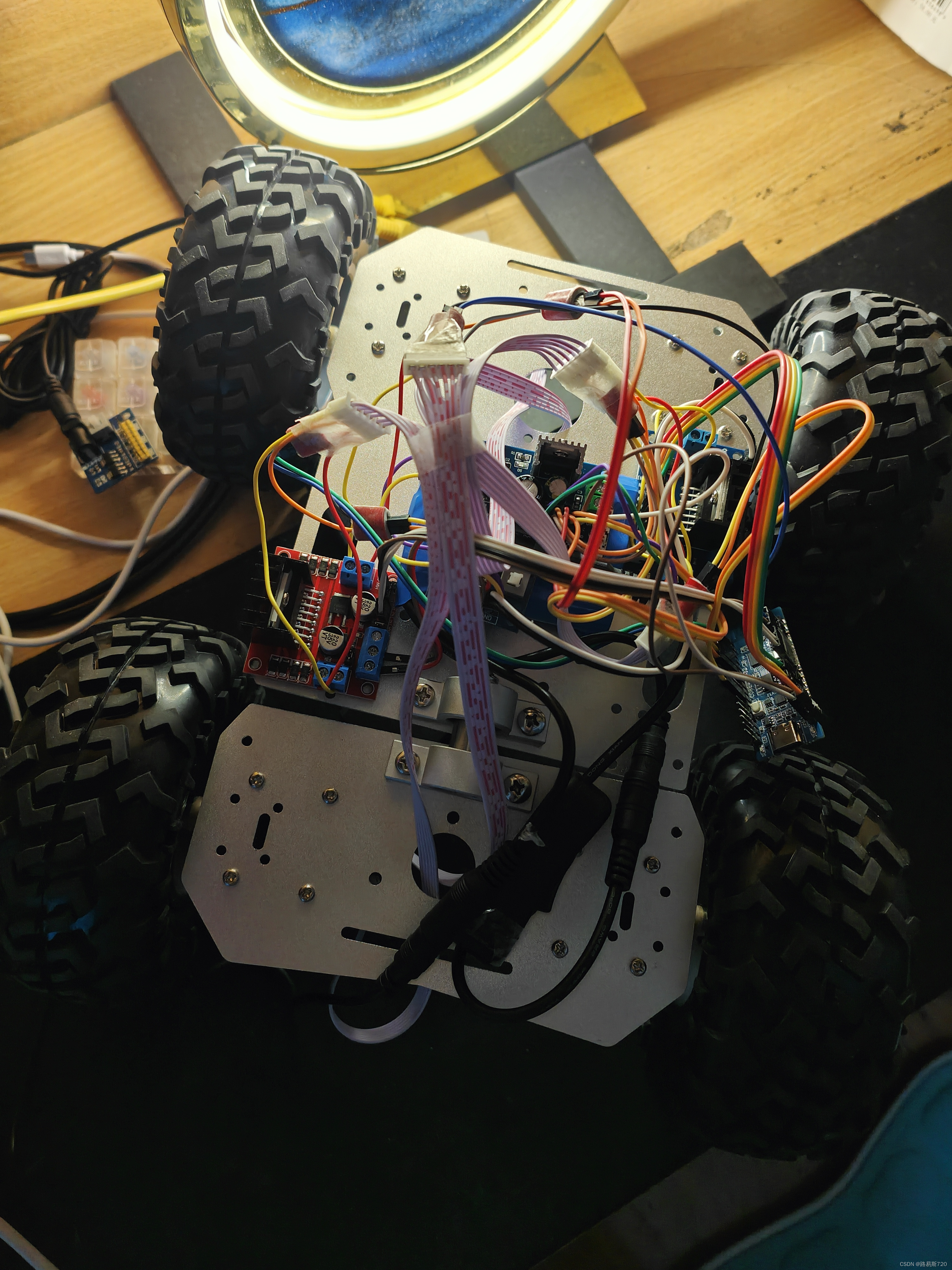
遥控方面,本项目使用HC-14模块,实测连接到电脑可以通过串口接收遥控器数据,遥控器有线连接底盘上的主控也能正常使用,但通过HC-14模块接收数据时没有响应,需要更换其它方案,但本质上都是通过串口透传来控制。
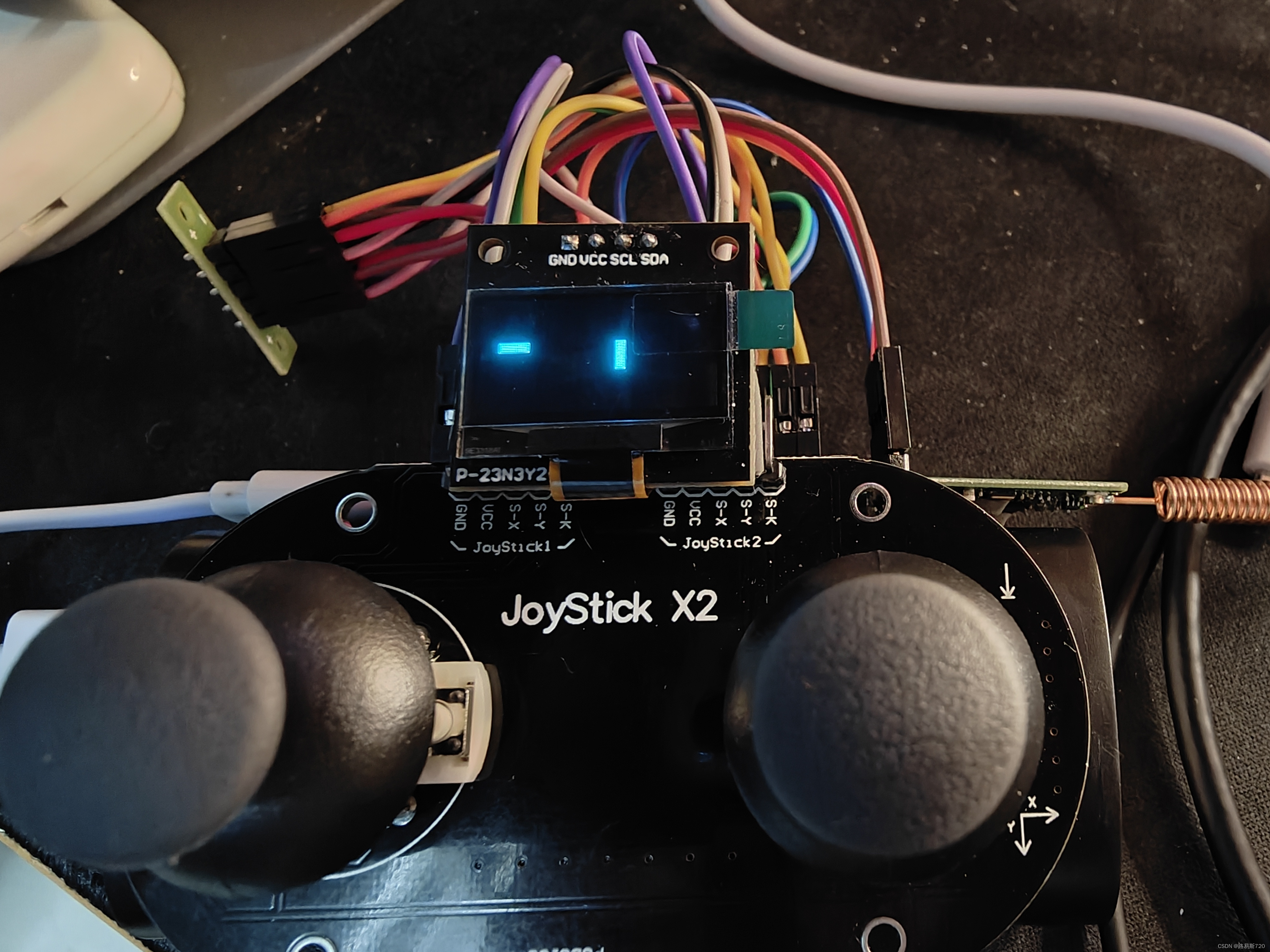
两边车轮的转速由遥控器计算得到。遥控器程序有两种模式,第一种模式通过测量两个摇杆y轴电压分别控制两边电机pwm占空比,第二种模式通过左摇杆y轴控制速度,通过右摇杆x轴控制转向。通过左摇杆x轴控制模式切换(连续3次检测到电压达到目标值再切换)。数据换算为两侧电机pwm占空比,遥控器发出的两边占空比增加了1023以避免取负值,在底盘上的主控进行切换。另外,遥控器连接OLED屏幕,可以显示当前控制小车的两个摇杆轴的位置以辅助操作。
遥控器程序
#导入Pin模块
from machine import Pin
from mac
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











