






图像特征概述
图像特征表示是该图像唯一的表述,是图像的DNA

HOG
HOG (Histogram of Oriented Gradients)是一种用于目标检测的特征描述子。在行人检测中用的最多。HOG特征描述了图像中局部区域的梯度方向信息,通过计算图像中各个小区的梯度直方图来表示图像的特征。
HOG主要使用Sobel算子或其他梯度算子来计算图像的水平和垂直方向上的梯度值。接着将图像划分为多个小的区域(cell),在每个小区域内计算梯度方向的直方图。然后对每个小区域内的梯度方向直方图进行归一化。最后将归一化后的梯度方向直方图串联起来形成最终的特征向量。
有了这些特征向量可以用于训练机器学习模型(如支持向量机(SVM))
归一化(Normalization)常用于数据预处理,用于将数据缩放到相似的范围或分布。归一化通常是未来消除数据特征之间的量纲差异或者减少不同特征对模型的影响程度不均衡引起的问题。
不同特征往往具有不同的量纲,例如身高和体重就是两个具有不同单位的特征。如果不进行归一化,具有更大数值范围的特征可能会影响模型的训练。
在很多优化算法中,如梯度下降法,特征值范围较大的特征会导致更新的步长也较大,从而可能使得优化过程变得不稳定或者收敛速度变慢。通过归一化将特征值缩放到相对统一的范围内,有助于加速模型的收敛。
归一化的方法常见有
Min-Max Scaling(最小-最大缩放):将数据缩放到指定范围内,常见的是【0,1】或者【-1,1】。
Z-score Normalization (Z-score标准化):将数据缩放到均值为0,标准差为1的正态分布上。
角点检测
Harris角点检测算法
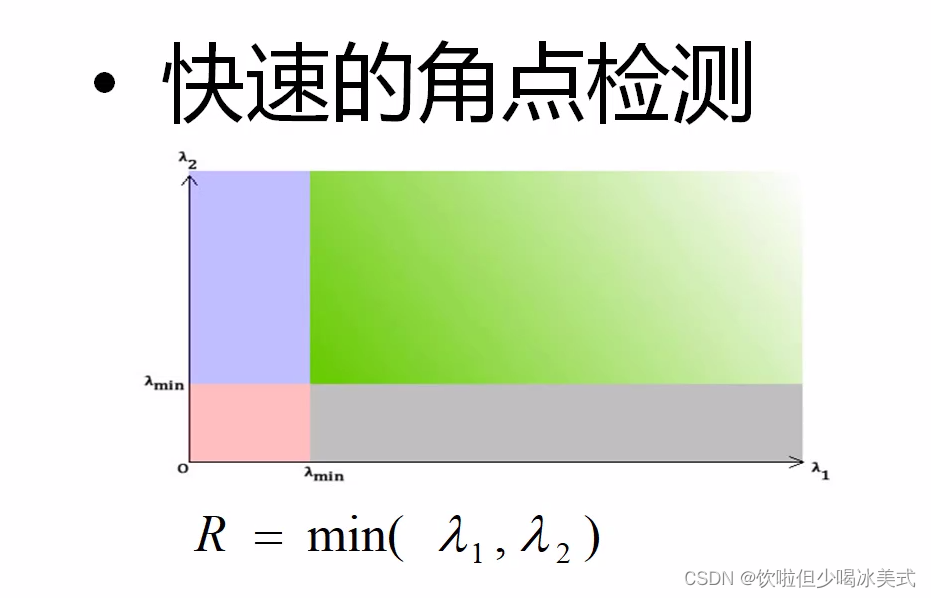
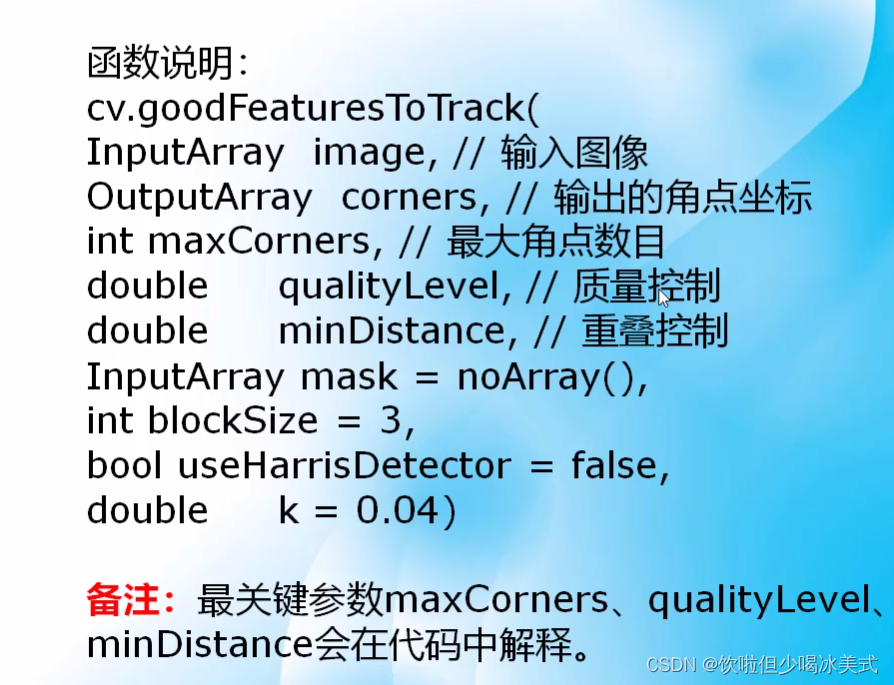
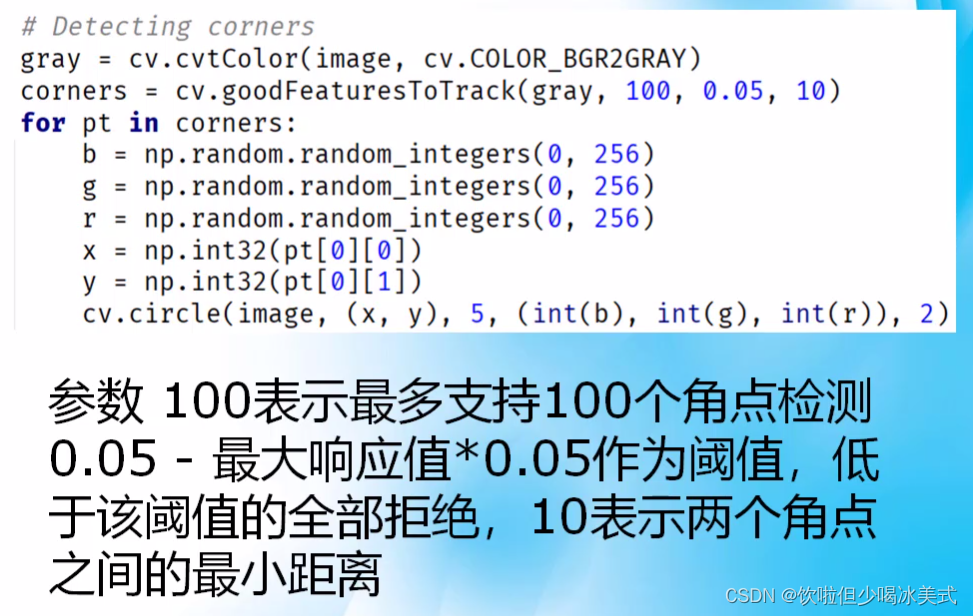
Shi-tomas角点检测算法



Shi-tomas角点检测算法
















 484
484











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









