






一:项目介绍
这个项目涵盖了两个主要部分(主要是应付老师布置的作业):KEIL代码编写和Proteus仿真。在KEIL代码编写中,重点是利用基础定时器实现时钟功能,并在六位数码管上显示小时、分钟和秒。难点在于有效地处理时间数据,以便在数码管上进行正确的显示。此外,项目的扩展部分可以包括按键功能,用于设置和校准时间,增加了一定的交互性和实用性。
在Proteus仿真方面,配置好I/O后,需要添加74LS245模块来增强I/O的驱动能力,以确保能够有效地驱动数码管。由于采用共阳极连接的数码管,需要正确配置段选和位选。特别需要注意的是,最好将段选和位选的I/O分配在不同的GPIO上,以避免在写入GPIO时发生冲突,这可以提高系统的稳定性和可靠性。
二:模块介绍:
此Proteus仿真使用的是stm32F103R6,74LS245模块,LCD1602,按键,这里主要介绍一下74LS245模块,74LS245是一种集成电路芯片,通常被称为“八位双向电平转换器”。它通常用于将信号从一个电平转换为另一个电平,或者在两个不同的系统之间进行数据传输。在数字系统中,它常被用来增强输入/输出(I/O)的驱动能力。
这个模块有八个输入/输出引脚(A1-A8和B1-B8),B1-B8口它们可以在输入和输出模式之间切换。它还有两个方向控制引脚(DIR和DIR!),用来控制数据的流向。当DIR为高电平时,数据从A端口向B端口传输;当DIR为低电平时,数据从B端口向A端口传输。此proteus仿真实验中A1-A8口连接STM32F10R6的PC0-PC7端口,B1-B8口输出口连接LCD1602的a,b,c,d,e,f,g,并将DIR设置为高电平,使数据从A端口向B端口传输,CE低电平有效使能,所以CE接低电平;
在数字系统中,当需要将信号从一个系统转移到另一个系统时,可以使用74LS245来进行电平转换和驱动。在驱动数码管的情况下,它可以提供足够的电流来确保数码管的正常工作,并且能够有效地处理输出。
三:思路介绍:
基于http://原文链接:https://blog.csdn.net/clanned16/article/details/129110242.STM32的时钟设计并在六位数码管上显示附proteus仿真 的六位数码管配置思路,来实现自己主要逻辑。
首先大致逻辑思路是配置STM32定时器时间设置使用基本定时器TIM3,定时1s,设置变量hour,minute,hour,在TIM3的中断里实现时钟设计。配置STM32定时器时间设置使用基本定时器TIM2,定时1ms,把数码管的数组显示放里面不断扫描显示,再进行配置外部中断1,2,3实现3个按键控制改变时钟的hour,minute,second。
四:源码介绍:
Seg.c
此proteus实验仿真使用STM32的PB0-PB5端口当作六位数码管的位选,使用STM32的PC0-PC7端口当作六位数码管的位选,配置端口的时候为了方便配置PC0-PC7,我们可以直接写0x00ff,将这八位置为高电平,配置PB0-PB5,我们可以直接写0x003f,将这六位置为高电平。
#include "stm32f10x.h"
#include "Seg.h"
void Seg_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //使能GPIOC时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitStructure.GPIO_Pin = 0x00ff; //PC0-PC7引脚配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //配置为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIOC速度为50MHz
GPIO_Init(GPIOC, &GPIO_InitStructure); //初始化PC0-PC7
GPIO_InitStructure.GPIO_Pin = 0x003f; //PB0-PB5引脚配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //配置为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIOB速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB0-PB5
}
Timer.c
这里强调一下定时器的配置,定时1s
定时器定时频率=时钟源频率/ [(PSC+(ARR+1)]=72M/[((7200-1)+1)((10000)+1)]=1Hz,所以定时的时间为1s.
简单理解 72M的意思是1s可以计数 72000000 次,先进行7200预分频 1s可以计数10000 次,此时, 1s可以计数10000 次,所以1s的自动重装值是 10000,也就是从0 计数到10000 后 1s 也就到了,同理定时器定时1ms也是这样配置。
定时器计时模式有三种
递增计数模式:计数器从 0 计数到自动重载值,然后重新从 0 开始计数并生成计数器上溢事件。
递减计数模式:计数器从自动重载值开始递减到 0,然后重新从自动重载值开始计数并生成计数器下溢事件。
中心对齐模式:计数器从 0 开始计数到自动重载值 – 1 ,生成计数器上溢事件;然后从自动重载值开始向下计数到 1 并生成计数器下溢事件。之后从0 开始重新计数。我们这里选择的是递增计数模式。
#include "timer.h"
#include "stm32f10x_tim.h"
#include "Delay.h"
#include "stm32f10x_exti.h" // Device header
uint16_t table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};//共阴极,设置段选0-9位数字
uint16_t wei[]={0x0df,0x0ef,0x0f7,0x0fb,0x0fd,0x0fe}; //位选,从数码管右边到左边显示;
int32_t second = 25,minute = 30,hour = 9;
void TIM3 and TIM2_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); // 时钟使能
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_InternalClockConfig(TIM2);
// 定时器TIM3初始化
TIM_TimeBaseStructure.TIM_Period = 10000 - 1; // 设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler = 7200 - 1; // 设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); // 根据指定的参数初始化TIMx的时间基数单位
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period = 1000 - 1;
TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1;
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//清除TIM2的中断更新标志位
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//配置TIM2信的中断更新
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); // 使能指定的TIM3中断,允许更新中断
// 中断优先级NVIC设置
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);//设定中断优先级分组0
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; // TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // 先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; // 从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); // 初始化NVIC寄存器
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;// 先占优先级2级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;// 从优先级1级
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE);//使能TIM2
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
void EXIT_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//复用端口
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource1);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource2);
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1 | EXTI_Line2 ;//外部中断1,2,3
EXTI_InitStructure.EXTI_LineCmd = ENABLE;//使能
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿有效
EXTI_Init(&EXTI_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;//打开外部中断0的通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;//打开外部中断0的通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI2_IRQn;//打开外部中断0的通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_Init(&NVIC_InitStructure);
}
// 定时器3中断服务程序
void TIM3_IRQHandler (void) // TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) // 检查TIM3更新中断发生与否
{
second++;
if(count>=60)
{
second = 0;
minute++;
if(minute >= 60)
{
minute = 0;
hour++;
if(hour >= 24)
{
hour = 0;
}
}
}
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); // 清除TIMx更新中断标志
}
}
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
GPIO_Write(GPIOB,wei[0]);
GPIO_Write(GPIOC,table[second%10]);
Delay(10);
GPIO_Write(GPIOB,wei[1]);
GPIO_Write(GPIOC,table[second/10%10]);
Delay(10);
GPIO_Write(GPIOB,wei[2]);
GPIO_Write(GPIOC,table[minute%10]);
Delay(10);
GPIO_Write(GPIOB,wei[3]);
GPIO_Write(GPIOC,table[minute/10%10]);
Delay(10);
GPIO_Write(GPIOB,wei[4]);
GPIO_Write(GPIOC,table[hour%10]);
Delay(10);
GPIO_Write(GPIOB,wei[5]);
GPIO_Write(GPIOC,table[hour/10%10]);
Delay(10);
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line0) == SET)
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == 1)
{
if(++hour == 24) hour = 0;
}
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
void EXTI1_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line1) == SET)
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1) == 1)
{
if(++minute == 60) minute = 0;
}
EXTI_ClearITPendingBit(EXTI_Line1);
}
}
void EXTI2_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line2) == SET)
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_2) == 1)
{
if(++second == 60) second = 0;
}
EXTI_ClearITPendingBit(EXTI_Line2);
}
}
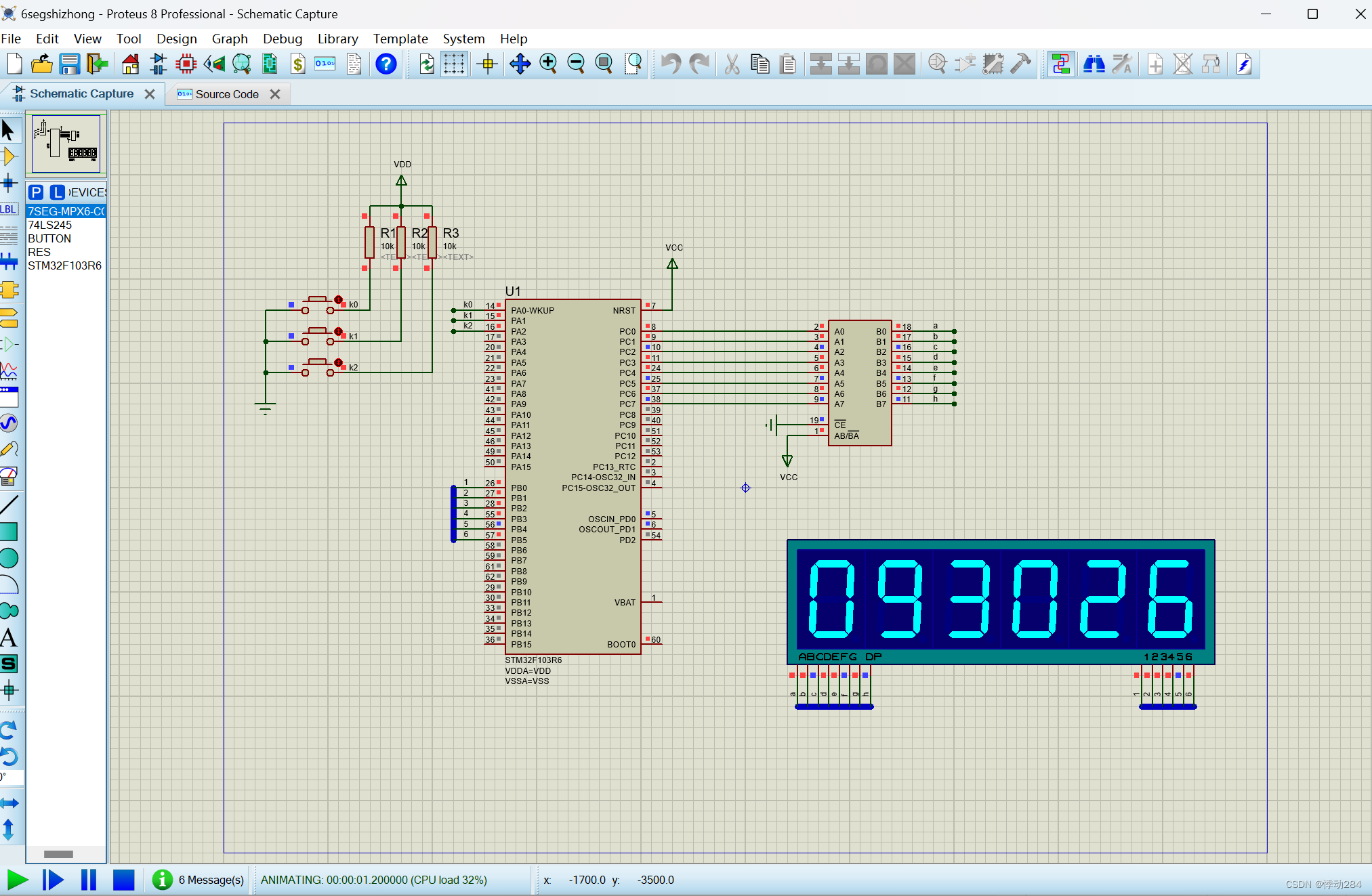
proteus仿真图显示:















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









