







一、下载MVS客户端

二、解压并安装MVS客户端





三、找到MVS示例代码(代码在MVS的安装位置)
工业相机只允许单条连接,也就是说MVS如果连接了相机,python代码就无法获取数据,此时必须退出MVS客户端。

四、使用Pycharm打开Python代码示例文件夹




如果觉得爆红难受,将MvImport文件夹中的五个文件,拷贝到BasicDemo文件夹下即可。


博主这里出现了一个警告:获取不到相机参数。忽略掉即可。


五、获取相机图像
安装一下opencv
pip3 install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple相机工具类(读者直接复制)HKCamera_class.py
import sys
from ctypes import *
import numpy as np
import cv2
# 这里要根据个人情况进行修改 TODO
sys.path.append("E:\MVS_STD_4.2.1_230921\MVS\Development\Samples\Python\MvImport") # 打开MVS中的MvImport文件,对于不同系统打开的文件路径跟随实际文件路径变化即可
from MvCameraControl_class import * # 调用了MvCameraControl_class.py文件
class HKCamera():
def __init__(self, CameraIdx=0, log_path=None, CameraIp=""):
self.name = "HKCamera"
deviceList = self.enum_devices()
strModeName = ""
TargetCamera = None
for i in range(0, deviceList.nDeviceNum):
mvcc_dev_info = cast(deviceList.pDeviceInfo[i], POINTER(MV_CC_DEVICE_INFO)).contents
nip1 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24)
nip2 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16)
nip3 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8)
nip4 = (mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff)
Devip = "%d.%d.%d.%d" % (nip1, nip2, nip3, nip4)
if Devip == CameraIp:
TargetCamera = i
self.camera = self.open_camera(deviceList=deviceList, CameraIdx=TargetCamera, log_path=log_path)
# self.start_camera()
def __del__(self):
if self.camera is None:
return
# 停止取流
# ret = self.camera.MV_CC_StopGrabbing()
# if ret != 0:
# raise Exception("stop grabbing fail! ret[0x%x]" % ret)
# 关闭设备
ret = self.camera.MV_CC_CloseDevice()
if ret != 0:
raise Exception("close deivce fail! ret[0x%x]" % ret)
# 销毁句柄
ret = self.camera.MV_CC_DestroyHandle()
if ret != 0:
raise Exception("destroy handle fail! ret[0x%x]" % ret)
@staticmethod
def enum_devices(device=0, device_way=False):
"""
device = 0 枚举网口、USB口、未知设备、cameralink 设备
device = 1 枚举GenTL设备
"""
if device_way == False:
if device == 0:
cameraType = MV_GIGE_DEVICE | MV_USB_DEVICE | MV_UNKNOW_DEVICE | MV_1394_DEVICE | MV_CAMERALINK_DEVICE
deviceList = MV_CC_DEVICE_INFO_LIST()
# 枚举设备
ret = MvCamera.MV_CC_EnumDevices(cameraType, deviceList)
if ret != 0:
raise Exception("enum devices fail! ret[0x%x]" % ret)
return deviceList
else:
pass
elif device_way == True:
pass
def open_camera(self, deviceList, CameraIdx, log_path):
# generate a camera instance
camera = MvCamera()
# 选择设备并创建句柄
stDeviceList = cast(deviceList.pDeviceInfo[CameraIdx], POINTER(MV_CC_DEVICE_INFO)).contents
if log_path is not None:
ret = self.camera.MV_CC_SetSDKLogPath(log_path)
if ret != 0:
raise Exception("set Log path fail! ret[0x%x]" % ret)
# 创建句柄,生成日志
ret = camera.MV_CC_CreateHandle(stDeviceList)
if ret != 0:
raise Exception("create handle fail! ret[0x%x]" % ret)
else:
# 创建句柄,不生成日志
ret = camera.MV_CC_CreateHandleWithoutLog(stDeviceList)
if ret != 0:
raise Exception("create handle fail! ret[0x%x]" % ret)
# 打开相机
ret = camera.MV_CC_OpenDevice(MV_ACCESS_Exclusive, 0)
if ret != 0:
raise Exception("open device fail! ret[0x%x]" % ret)
return camera
def start_camera(self):
stParam = MVCC_INTVALUE()
memset(byref(stParam), 0, sizeof(MVCC_INTVALUE))
ret = self.camera.MV_CC_GetIntValue("PayloadSize", stParam)
if ret != 0:
raise Exception("get payload size fail! ret[0x%x]" % ret)
self.nDataSize = stParam.nCurValue
self.pData = (c_ubyte * self.nDataSize)()
self.stFrameInfo = MV_FRAME_OUT_INFO_EX()
memset(byref(self.stFrameInfo), 0, sizeof(self.stFrameInfo))
self.camera.MV_CC_StartGrabbing()
def get_Value(self, param_type, node_name):
"""
:param cam: 相机实例
:param_type: 获取节点值得类型
:param node_name: 节点名 可选 int 、float 、enum 、bool 、string 型节点
:return: 节点值
"""
if param_type == "int_value":
stParam = MVCC_INTVALUE_EX()
memset(byref(stParam), 0, sizeof(MVCC_INTVALUE_EX))
ret = self.camera.MV_CC_GetIntValueEx(node_name, stParam)
if ret != 0:
raise Exception("获取 int 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stParam.nCurValue
elif param_type == "float_value":
stFloatValue = MVCC_FLOATVALUE()
memset(byref(stFloatValue), 0, sizeof(MVCC_FLOATVALUE))
ret = self.camera.MV_CC_GetFloatValue(node_name, stFloatValue)
if ret != 0:
raise Exception("获取 float 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stFloatValue.fCurValue
elif param_type == "enum_value":
stEnumValue = MVCC_ENUMVALUE()
memset(byref(stEnumValue), 0, sizeof(MVCC_ENUMVALUE))
ret = self.camera.MV_CC_GetEnumValue(node_name, stEnumValue)
if ret != 0:
raise Exception("获取 enum 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stEnumValue.nCurValue
elif param_type == "bool_value":
stBool = c_bool(False)
ret = self.camera.MV_CC_GetBoolValue(node_name, stBool)
if ret != 0:
raise Exception("获取 bool 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stBool.value
elif param_type == "string_value":
stStringValue = MVCC_STRINGVALUE()
memset(byref(stStringValue), 0, sizeof(MVCC_STRINGVALUE))
ret = self.camera.MV_CC_GetStringValue(node_name, stStringValue)
if ret != 0:
raise Exception("获取 string 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
return stStringValue.chCurValue
else:
return None
def set_Value(self, param_type, node_name, node_value):
"""
:param cam: 相机实例
:param param_type: 需要设置的节点值得类型
int:
float:
enum: 参考于客户端中该选项的 Enum Entry Value 值即可
bool: 对应 0 为关,1 为开
string: 输入值为数字或者英文字符,不能为汉字
:param node_name: 需要设置的节点名
:param node_value: 设置给节点的值
:return:
"""
if param_type == "int_value":
ret = self.camera.MV_CC_SetIntValueEx(node_name, int(node_value))
if ret != 0:
raise Exception("设置 int 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "float_value":
ret = self.camera.MV_CC_SetFloatValue(node_name, float(node_value))
if ret != 0:
raise Exception("设置 float 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "enum_value":
ret = self.camera.MV_CC_SetEnumValueByString(node_name, node_value)
if ret != 0:
raise Exception("设置 enum 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "bool_value":
ret = self.camera.MV_CC_SetBoolValue(node_name, node_value)
if ret != 0:
raise Exception("设置 bool 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
elif param_type == "string_value":
ret = self.camera.MV_CC_SetStringValue(node_name, str(node_value))
if ret != 0:
raise Exception("设置 string 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
def set_exposure_time(self, exp_time):
self.set_Value(param_type="float_value", node_name="ExposureTime", node_value=exp_time)
def get_exposure_time(self):
return self.get_Value(param_type="float_value", node_name="ExposureTime")
def get_image(self, width=None):
"""
:param cam: 相机实例
:active_way:主动取流方式的不同方法 分别是(getImagebuffer)(getoneframetimeout)
:return:
"""
# ret= self.camera.MV_CC_SaveImageEx2()
ret = self.camera.MV_CC_GetOneFrameTimeout(self.pData, self.nDataSize, self.stFrameInfo, 5000)
if ret == 0:
image = np.asarray(self.pData).reshape((self.stFrameInfo.nHeight, self.stFrameInfo.nWidth, 3))
# if width is not None:
# image = cv2.resize(image, (width, int(self.stFrameInfo.nHeight * width / self.stFrameInfo.nWidth)))
# pass
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
return image
else:
return None
def show_runtime_info(self, image):
exp_time = self.get_exposure_time()
cv2.putText(image, ("exposure time = %1.1fms" % (exp_time * 0.001)), (20, 50), cv2.FONT_HERSHEY_SIMPLEX, 0.5,
255, 1)
获取照片数据
Main.py
import os
import cv2
from numpy import ndarray
from HKCamera_class import HKCamera
if __name__ == '__main__':
camera = HKCamera(CameraIp='192.168.1.191')
# 对摄像头配置进行设置
try:
camera.set_Value(param_type="enum_value", node_name="PixelFormat",
node_value='RGB8Packed')
camera.set_Value(param_type="enum_value", node_name="ExposureAuto",
node_value='Off')
camera.set_Value(param_type="float_value", node_name="ExposureTime",
node_value='400')
except Exception as e:
print(e)
os._exit(0)
camera.start_camera()
while True:
try:
image: ndarray = camera.get_image()
if image is not None:
# 这里拿到图片的ndarray数据后,可以转Image、可以保存图片....等等操作
print(image.shape)
key = cv2.waitKey(50) & 0xFF
if key == ord('e') or key == ord('E'):
cv2.destroyAllWindows()
break
except Exception as e:
print(e)

六、补充2025年1月24日
错误一:AttributeError: 'HKCamera' object has no attribute 'camera'
原因:IP错误,未找到相关相机。确保IP正确,确保IP与本机在同一个网段。
错误二:设置 enum 型数据节点 PixelFormat 失败 !报错码 ret[0x80000004]

这是因为相机的图像配置,跟代码的摄像机配置不一致引起的。
代码配置的是:RGB8Packed格式。你需要用MVS将你的摄像机配置成RGB8Packed格式。保持一致。
有些工业相机不支持RGB8Packed格式,那我们就需要去MVS上查看一下默认的图像格式,然后将代码里的格式改成相机支持的格式。

七、一些常见错误码
1.MV_OK 0x00000000 成功,无错误
解析:-2147483648/0x80000000正常状态返回,执行成功
2.MV_E_HANDLE 0x80000000 错误或无效的句
解析:-2147483648/0x80000000 无效句柄,常见问题如下:
用户没有申请句柄,直接调用接口,新手常犯的错误,要引导去学习我们接口使用流程
用户创建了句柄,但是其他地方销毁了句柄,用户没有注意到,需要仔细排查代码
3.MV_E_SUPPORT 0x80000001 不支持的功能
解析:-2147483647/0x80000001
SDK接口的bayer空域降噪、无损压缩、色彩矫正等ISP功能,需要配合CS-Pro系列相机支持
格式转化时,不同格式的相互转化,超出了算法能力集,详情请仔细查阅SDK接口说明
4.MV_E_BUFOVER 0x80000002 缓存已满
解析:-2147483646/0x80000002
常见于gige驱动启动时报错,低版本SDK在某些网卡上面易发,驱动启动失败后,走socket协议发送接收相机数据,效率低,CPU负载大 推荐使用SDK3.5版本解决此问题
5.MV_E_CALLORDER 0x80000003 函数调用顺序有误
解析:-2147483645/0x80000003
sdk接口调用,有一定流程顺序,例如getimagebuffer在startgrabing之前调用,就违反了接口流程,就会报错顺序调用错误 还比如,没有调用startgrabing接口,就去调用频繁调用stopgrabing接口,也会报此错误
6.MV_E_PARAMETER 0x80000004 错误的参数
解析:-2147483644/0x80000004
常见问题: 常见于格式转化、图像保存等需要补充数据结构的接口调用,部分参数传入错误,或者没有传入,这个时候,要去仔细检查参数的传入是否正确
7.MV_E_NODATA 0x80000007 无数据
解析:-2147483641/0x80000007无数据
相机帧率低,用户调用主动取流接口getimagebuffer/getoneframetimout频率高于相机出图频率,且超时时间短,没有拿到图片,此时应该打印相机帧号,如帧号连续则为正常现象
相机处于触发模式,没有触发信号给到相机,此时,应该排查用户是否给了软触发或者硬触发信号
相机停流,此时,建议打开MVS,观察相机状态
耐心寻找规律,看看是否跟packsize、scpd、取流超时时间不合理所致
8.MV_E_NOENOUGH_BUF 0x8000000A 传入的内存空间不足
解析:-2147483638/0x8000000A
1.用户自行开辟的内存大小,小于当前相机图像所需要的图像大小,例如用mono8的图像大小,接收RGB的图像
2.用户定义的内存大小,中途更换了分辨率更高的相机,导致所需内存较多
3.相机开启了chunk功能,用户开辟缓存大小,仅考虑了图像宽高像素格式,没有考虑到chunk
解决方法:
排查内存开辟大小,建议使用相机payloadsize大小
检查相机图像格式
关闭相机chunk等功能
9.MV_E_UNKNOW 0x800000FF 未知的错误
解析:-2147483137/0x800000FF GenICam未知错误
未知错误,形成原因较难分析,建议如下
更新最新版本的sdk
开启sdk日志等级,通过日志分析形成原因
10.MV_E_GC_GENERIC 0x80000100 通用错误
解析:-2147483392/0x80000100
通用接口调用,关键词写错,例如曝光:ExposureTime,拼写错误就会报错
第三方相机链接,例如迈德威视相机链接MVS,也会报通用错误,这是因为迈德威视不是标准的genicam协议的相机导致的
接口类型用错,例如曝光时float型节点,我们使用了一个int型的节点接口进行读写,访问,那么也会报通用错误
11.MV_E_GC_RANGE 0x80000102 值超出范围
解析:-2147483390/0x80000102
接口传入的参数值,超出相机接受范围,例如,曝光存在上下限,图像宽高存在步进,没有按照步进进行设置等等
12.MV_E_GC_ACCESS 0x80000106 节点访问条件有误
解析:-2147483386/0x80000106
常见的问题类型有: 相机节点不存在或者无法访问,例如,自动曝光,在手动曝光情况下,自动曝光节点会被隐藏,或者其他相机存在这个参数,而使用的相机无此参数,例如线扫相机的行频参数等等,还比如说部分相机无此功能,例如event参数,部分相机固件暂不支持用户调用
13.MV_E_GC_TIMEOUT 0x80000107 超时
解析:-2147483385/0x80000107 GVCP命名包回复超时,一般出现在网络环境不好的情况下,此时应该调用接口加大gvcp命令包等待时间(MV_GIGE_GetGvcpTimeout()),持续出现该报错,应该排查网络环境问题
分析:根据海康SDK提示文件:更新官网最新SDK时,设备网络SDK开发包【库文件】里的HCNetSDK.dll、HCCore.dll、PlayCtrl.dll、SuperRender.dll、AudioRender.dll、HCNetSDKCom文件夹等文件均要加载到程序里面,HCNetSDKCom文件夹(包含里面的功能组件dll库文件)需要和HCNetSDK.dll、HCCore.dll一起加载,放在同一个目录下,且HCNetSDKCom文件夹名不能修改。
解决方法:将海康SDK的头文件放到Debug文件夹.exe文件的存放处:
14.MV_E_ACCESS_DENIED 0x80000203 设备无访问权限
解析:-2147483133/0x80000203常见问题有:
相机被其他软件打开占用,关闭其他软件,检查设备管理器中,可能存在的残留进程
代码debug下,心跳时间问题,等待60s后,可以重新打开(此问题参考心跳问题解决方法,可缩短打开时间)
其余问题,例如一上电就打不开相机,需要重新插拔网线、USB线,就是其他问题,需要具体问题,具体分析
15.MV_E_NETER 0x80000206 网络相关错误
解析:-2147483130/0x80000206
此类报错非常常见,主要分以下集中
相机掉线,能够在日志中发现大量的206报错,此时需要去区分掉线原因,结合相机上电时间、心跳时间、相机权限,日志等信息,综合判断
网线异常,导致相机掉线,也需要具体问题分析
16.MV_E_IP_CONFLICT 0x80000221 设备IP冲突
解析:-2147483103/0x80000221,常见于IP设置时,当前ip已经被其他设备使用,需要更换ip重新设置
17.MV_E_USB_READ 0x80000300 读USB出错
解析:-2147482880/0x80000300
USB读取相机信息失败,此类问题较为复制,与USB接口稳定性、线缆长度、电磁环境相关,往往不好分析,可以尝试插拔一下,或者更换USB接口尝试
18.MV_E_USB_WRITE 0x80000301 写USB出错
解析:-2147482879/0x80000301
同0x80000300一样,不好分析,可以尝试插拔一下,或者更换USB接口尝试
19.MV_E_USB_DRIVER 0x80000305 驱动不匹配或者未装驱动
解析: -2147482875/0x80000305
同0x80000300一样,问题复杂,除了更换USB接口外,还可以尝试更换sdk版本
另外一种场景,比较好解决的是,卸载第三方的usb驱动,比如说halcon驱动
20、错误号64:NET_DVR_LOADPLAYERSDKFAILED 64 载入当前目录下 Player Sdk 出错
分析:该问题为解决错误107时间引出,问题应该在文件放置目录不对或者库文件内容有缺失导致;解决方法:与错误107相同,将其库文件放置到指定目录;必要时:检查调用Play的文件中是否引入头文件,可引入头文件如“PlayM4.h”或“plaympeg4.h”尝试解决。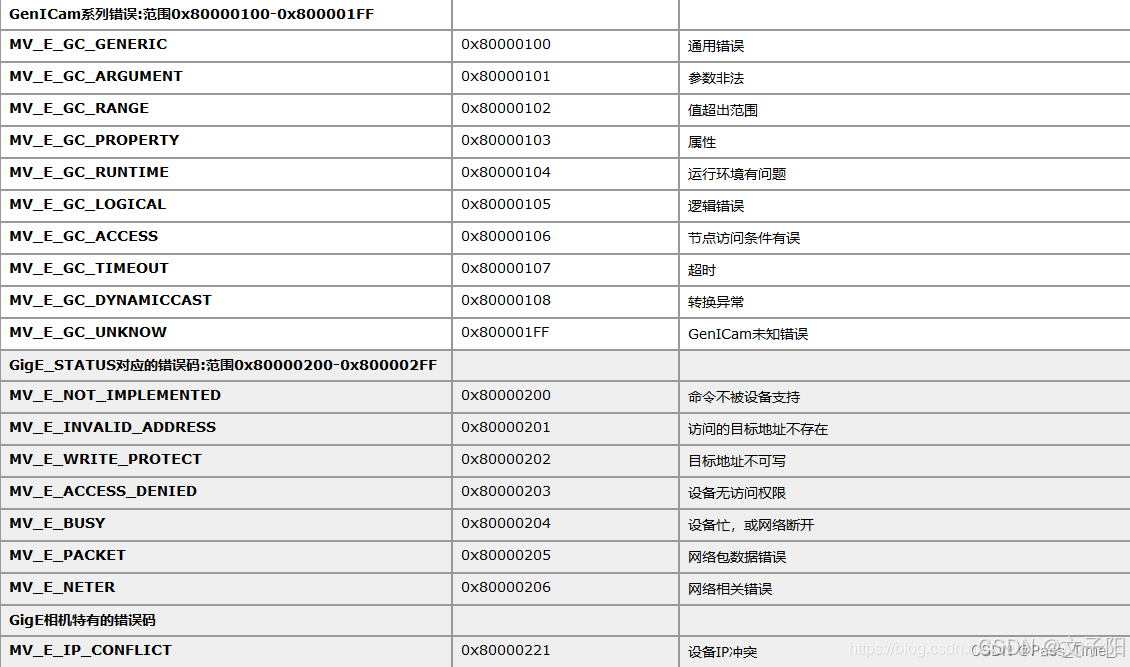


















 1036
1036

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











