






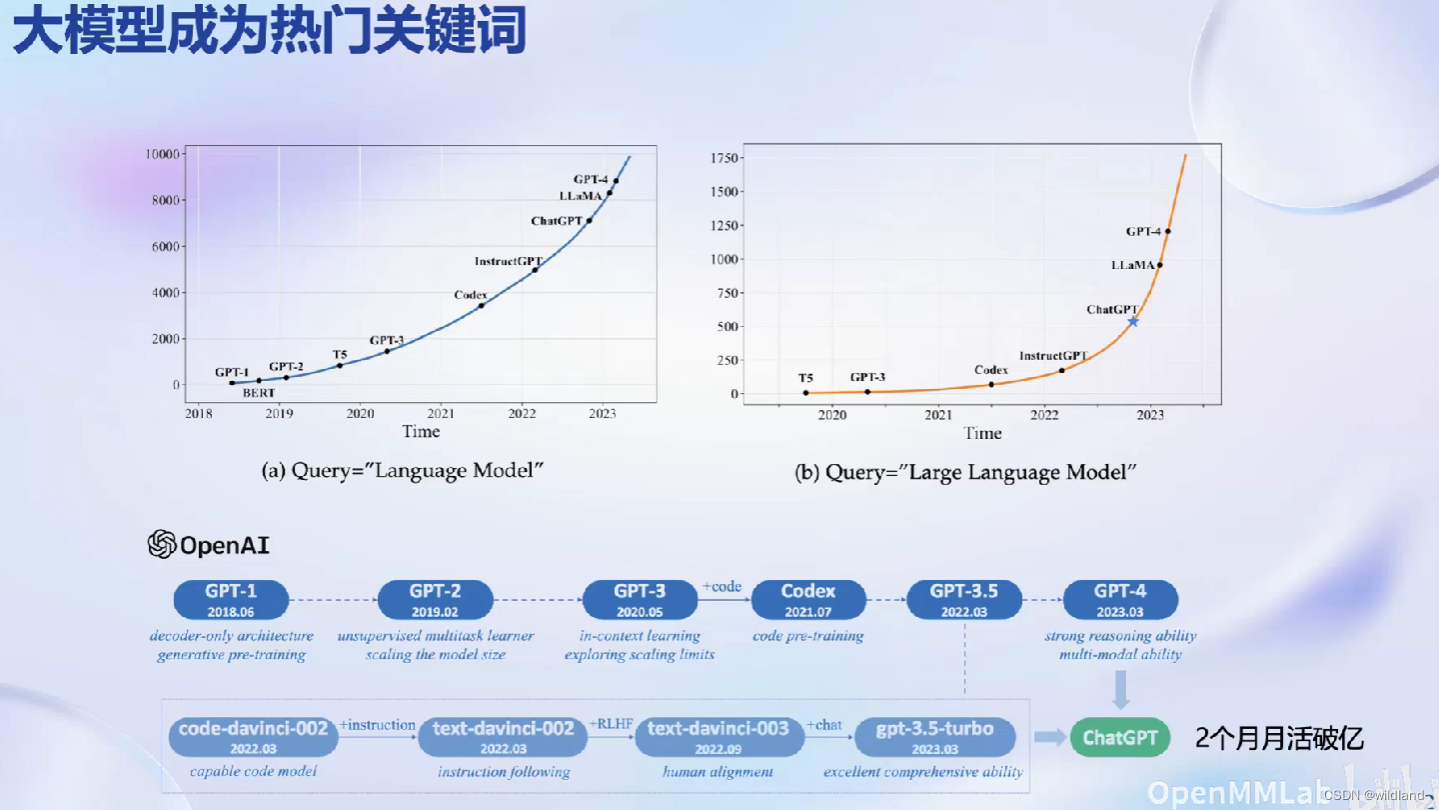
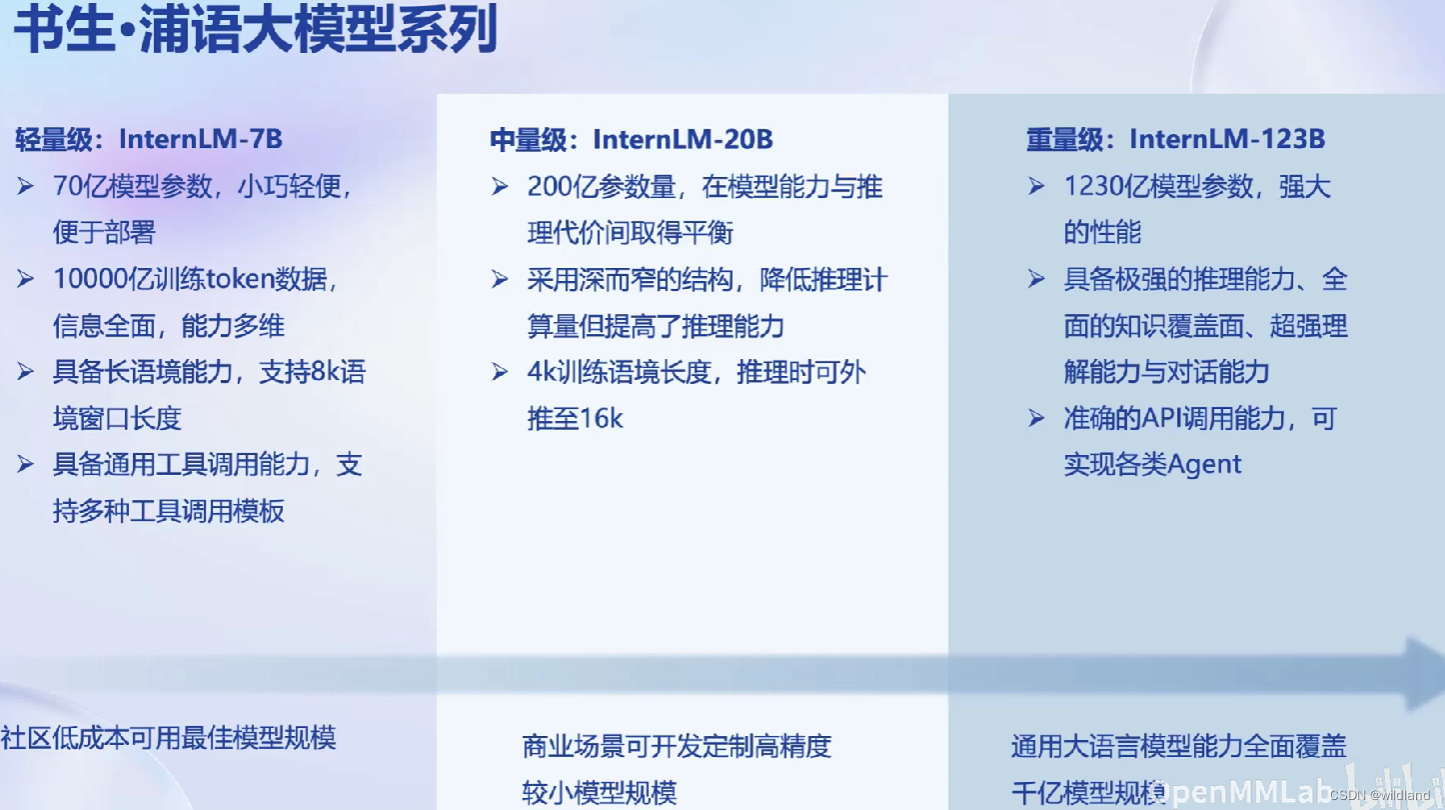
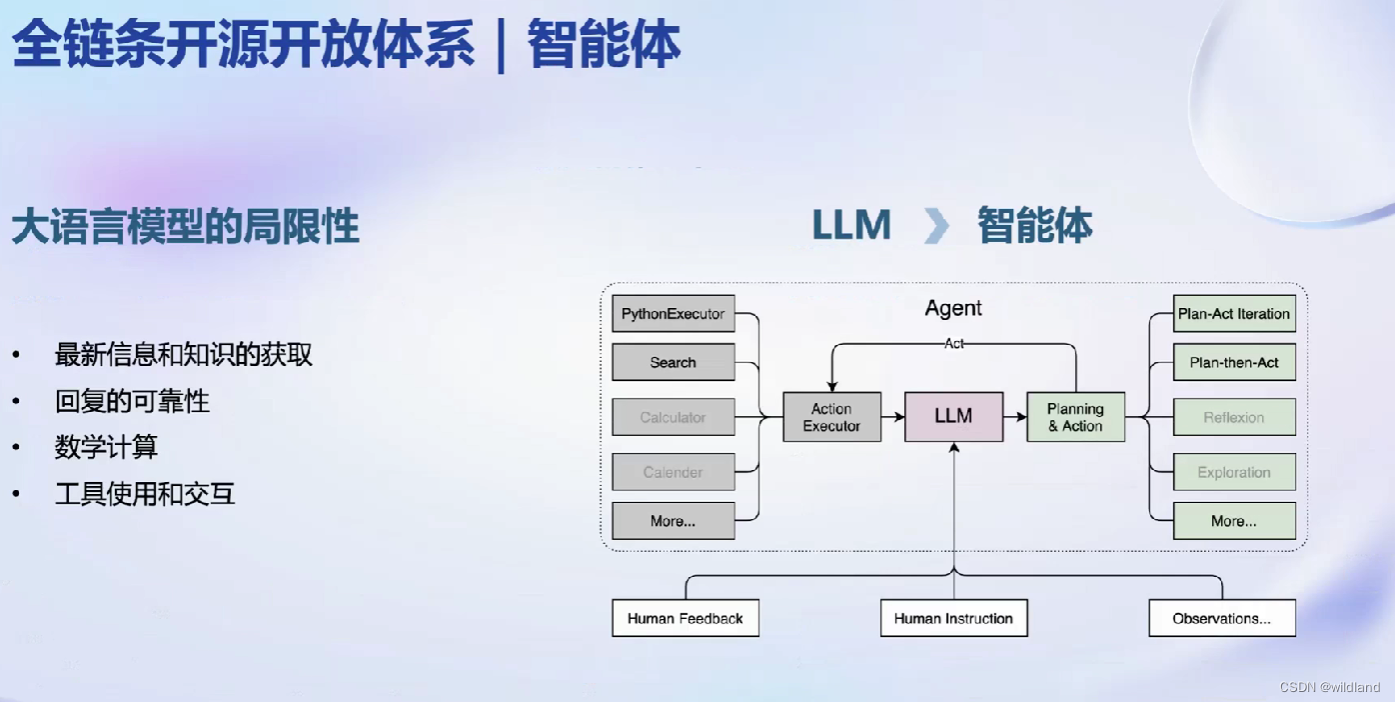
 随着ChatGPT的崛起,大模型成为当前研究焦点。文章关注不同规模(7B,20B,123B)的模型以及Agent框架在这一领域的应用和发展趋势。
随着ChatGPT的崛起,大模型成为当前研究焦点。文章关注不同规模(7B,20B,123B)的模型以及Agent框架在这一领域的应用和发展趋势。
随着ChatGPT的崛起,大模型成为当前研究焦点。文章关注不同规模(7B,20B,123B)的模型以及Agent框架在这一领域的应用和发展趋势。
随着ChatGPT的崛起,大模型成为当前研究焦点。文章关注不同规模(7B,20B,123B)的模型以及Agent框架在这一领域的应用和发展趋势。















01-07
01-13
02-05
 85
85
85
02-19
141
141
04-07
109
109
01-06
09-25
08-20
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









