




基于MSP430F5529与LCD1602的测温仪(带报警、报警温度可调)
这其实是我们做的一个大作业,检查完毕之后决定还是开源吧,以便其他学生做相似内容时做个参考。
废话不多说,直接上内容。
器件
一、msp43F5529开发板。(必备,此条和没说一样)。
二、Lcd1602A(最好时3.3V的,因为msp430的io引脚是3.3V的,不过我同学有用5V的也没烧掉开发板,但还是慎重点吧,3.3V)。
三、Pt100热敏电阻。(用ADC采样获取温度)
四、按键、杜邦线,各种电阻。
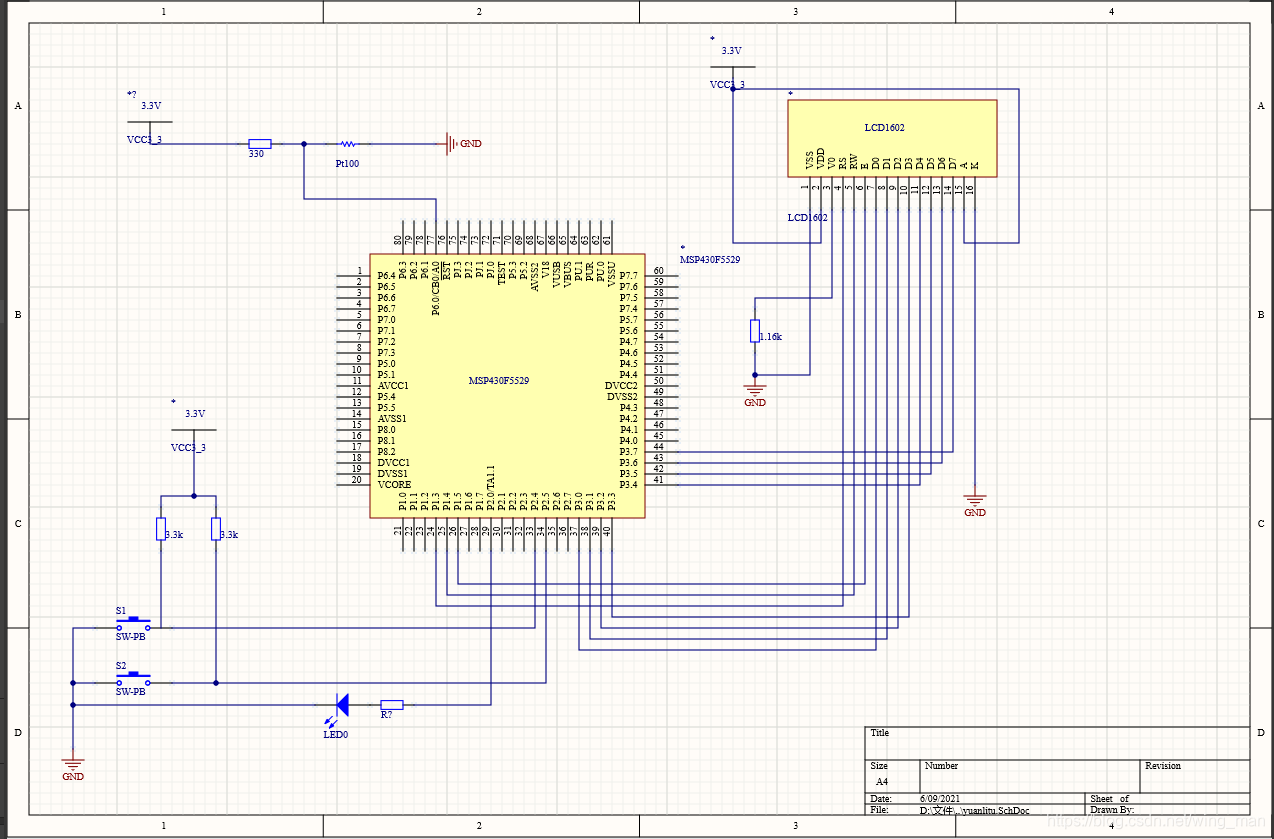
电路图
代码
lcd1602.h
#ifndef LCD1602_H_
#define LCD1602_H_
#include <msp430.h>
void Disp1Char(unsigned char data);
void DispStr(unsigned char *ptr);
void LCD1602_WriteCMD(unsigned char cmd);
void LCD1602_WriteDATA(unsigned char Data);
void LCD1602_Initi();
#endif
lcd1602.c
#include <msp430.h>
#include <string.h>
#include <LCD1602.h>
#define CPU_F ((double)8000000)
#define delay_us(x) __delay_cycles((long)(CPU_F*(double)x/1000000.0))
#define delay_ms(x) __delay_cycles((long)(CPU_F*(double)x/1000.0))
#define DataDir P3DIR
#define DataPort P3OUT
#define Busy 0x80
#define CtrlDir P1DIR
#define CLR_RS P1OUT&=~BIT3; //RS = P1.3
#define SET_RS P1OUT|=BIT3;
#define CLR_RW P1OUT&=~BIT4; //RW = P1.4
#define SET_RW P1OUT|=BIT4;
#define CLR_EN P1OUT&=~BIT5; //EN = P1.5
#define SET_EN P1OUT|=BIT5;
void Disp1Char(unsigned char data)
{
LCD1602_WriteDATA(data);
}
void DispStr(unsigned char *ptr)
{
unsigned char i,n;
n=strlen(ptr);
for (i=0;i<n;i++)
{
Disp1Char(ptr[i]);
}
}
void LCD1602_WriteCMD(unsigned char cmd)
{
CLR_EN;
CLR_RS; //指令
CLR_RW; //写
DataPort=cmd; //指令数据传到P0口待发送给LCD1602
delay_ms(1);
SET_EN; //LCD1602使能口
delay_ms(10);
CLR_EN; //产生下降沿
delay_ms(10);
}
void LCD1602_WriteDATA(unsigned char Data)
{
DataPort=Data;
SET_RS;
CLR_RW;
SET_EN;
CLR_EN;
delay_ms(10);
}
void LCD1602_Initi()
{
CtrlDir |= 0x38; //控制线端口设为输出状态
DataDir = 0xff;
LCD1602_WriteCMD(0x38); // 置功能,8位总线,双行显示,显示5X7的点阵字符
LCD1602_WriteCMD(0x0f); // 显示开关控制,开显示, 有光标,闪烁
LCD1602_WriteCMD(0x06); // 光标和显示位置设置, 光标移动方向右移,屏幕上所有文字不动
LCD1602_WriteCMD(0x01); // 清显示,指令码01H,光标复位到地址00H位置
delay_ms(10);
}
上面两处代码是借鉴博主Aliqiji的,移步此博主文章
下面继续
adc.h
#ifndef ADC_H_
#define ADC_H_
#include <msp430.h>
void adc_init(void);
#endif /* ADC_H_ */
adc.c
#include <adc.h>
void adc_init(void)
{
REFCTL0 &= ~REFMSTR; // Reset REFMSTR to hand over control to
// ADC12_A ref control registers
ADC12CTL0 = ADC12SHT0_8 + ADC12REFON + ADC12REF2_5V + ADC12ON;
ADC12MCTL0 |= ADC12INCH_4;
ADC12CTL1 = ADC12SHP; // enable sample timer
ADC12MCTL0 = ADC12SREF_1 + ADC12INCH_10; // ADC i/p ch A10 = temp sense i/p
ADC12IE = 0x001; // ADC_IFG upon conv result-ADCMEMO
__delay_cycles(100); // delay to allow Ref to settle
ADC12CTL0 |= ADC12ENC;
}
timer.h
#ifndef TIMER_H_
#define TIMER_H_
#include <msp430.h>
void TIM_init(void);
void GPIO_init(void);
#endif /* TIMER_H_ */
timer.c
#include <timer.h>
void TIM_init(void)
{
TA0CTL|= TASSEL_1 + MC_1 + TACLR + ID_3; //2^15/2^3=2^12;
TA0CCTL1 |= CCIE;
TA0EX0 |= TAIDEX_3; //2^10 1024hz;
TA0CCR0 = 1024;
TA1CTL |= TASSEL_1+TACLR;
TA1CCTL1 = OUTMOD_7;
TA1CCR0 = 16484;
TA1CCR1 = 8096;
TA1CTL |= MC_0;
}
void GPIO_init(void)
{
P2DIR &= ~(BIT4+BIT5); //输入
P2DIR |= BIT0;
P2SEL |= BIT0; //定时器输出
}
main.c
#include <msp430.h>
#include <adc.h>
#include <timer.h>
#include <lcd1602.h>
#include <math.h>
#define CPU_F ((double)8000000)
#define delay_us(x) __delay_cycles((long)(CPU_F*(double)x/1000000.0))
#define delay_ms(x) __delay_cycles((long)(CPU_F*(double)x/1000.0))
unsigned char s[]="tempe:";
unsigned char dis[6]="00.00";
volatile double temperatureC=30;
const double a=534118.4;
const double b=430;
double temp=10;
const double c=2083.062;
const double d=0.39;
unsigned int wendu_limit=30;
unsigned char wen[3];
long int i=0;
int main(void)
{
WDTCTL = WDTPW | WDTHOLD;
LCD1602_Initi();
LCD1602_WriteCMD(0x80);
DispStr(s);
GPIO_init();
TIM_init();
adc_init();
__bis_SR_register(LPM3_bits+GIE);
}
#pragma vector = TIMER0_A1_VECTOR
__interrupt void TIMER0_A1_ISR(void)
{
ADC12CTL0 &= ~ADC12SC;
ADC12CTL0 |= ADC12SC; // Sampling and conversion start
TA0CTL &= ~TAIFG;
__bis_SR_register(LPM3_bits+GIE);
}
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=ADC12_VECTOR
__interrupt void ADC12ISR (void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(ADC12_VECTOR))) ADC12ISR (void)
#else
#error Compiler not supported!
#endif
{
switch(__even_in_range(ADC12IV,34))
{
case 0: break; // Vector 0: No interrupt
case 2: break; // Vector 2: ADC overflow
case 4: break; // Vector 4: ADC timing overflow
case 6:
{// Vector 6: ADC12IFG0
TA0CTL |= MC_0;
temp = ADC12MEM0; // Move results, IFG is cleared
temperatureC = (a-b*temp)/(d*temp-c)-5;
if(temperatureC > wendu_limit)
{
TA1CTL |= MC_1;
TA1CCR1 = 8096;
}
if(temperatureC < wendu_limit)
{
TA1CTL |= MC_0;
TA1CCR1 = 0;
}
dis[0]=(int)temperatureC/10+0x30;
dis[1]=(int)temperatureC-(dis[0]-48)*10+0x30;
dis[2]='.';
dis[3]=(int)(temperatureC*10)-(dis[0]-48)*100-(dis[1]-48)*10+0x30;
dis[4]=(int)(temperatureC*100)-(dis[0]-48)*1000-(dis[1]-48)*100-(dis[3]-48)*10+0x30;
wen[0]=(int)wendu_limit/10+0x30;
wen[1]=(int)wendu_limit-(wen[0]-48)*10+0x30;
DispStr(dis);
Disp1Char(0xdf);
Disp1Char(0x43);
LCD1602_WriteCMD(0xC5);
DispStr(wen);
Disp1Char(0xdf);
Disp1Char(0x43);
LCD1602_WriteCMD(0x86);
for(i=0;i<50000;i++)
{
if((P2IN & BIT4)==0)
{
wendu_limit=wendu_limit+1;
delay_ms(50);
}
if((P2IN & BIT5)==0)
{
wendu_limit=wendu_limit-1;
delay_ms(50);
}
}
TA0CTL |= MC_1;
__bic_SR_register_on_exit(LPM3_bits+GIE); // Exit active CPU
}
case 8: break; // Vector 8: ADC12IFG1
case 10: break; // Vector 10: ADC12IFG2
case 12: break; // Vector 12: ADC12IFG3
case 14: break; // Vector 14: ADC12IFG4
case 16: break; // Vector 16: ADC12IFG5
case 18: break; // Vector 18: ADC12IFG6
case 20: break; // Vector 20: ADC12IFG7
case 22: break; // Vector 22: ADC12IFG8
case 24: break; // Vector 24: ADC12IFG9
case 26: break; // Vector 26: ADC12IFG10
case 28: break; // Vector 28: ADC12IFG11
case 30: break; // Vector 30: ADC12IFG12
case 32: break; // Vector 32: ADC12IFG13
case 34: break; // Vector 34: ADC12IFG14
default: break;
}
}
流程图
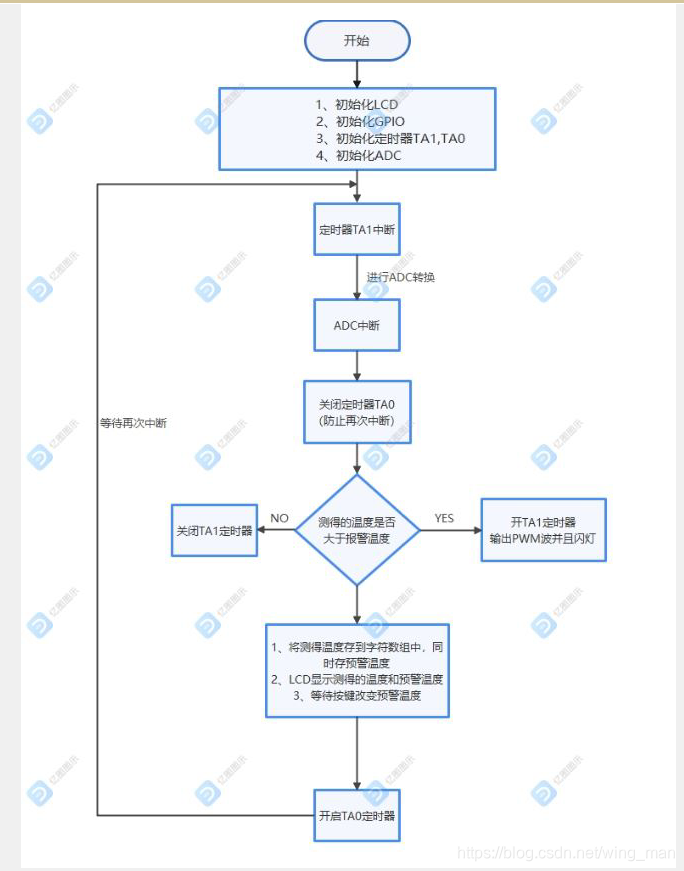
这个流程图其实也不是很标准,只能显示出大致的情况,具体还是阅读程序吧。
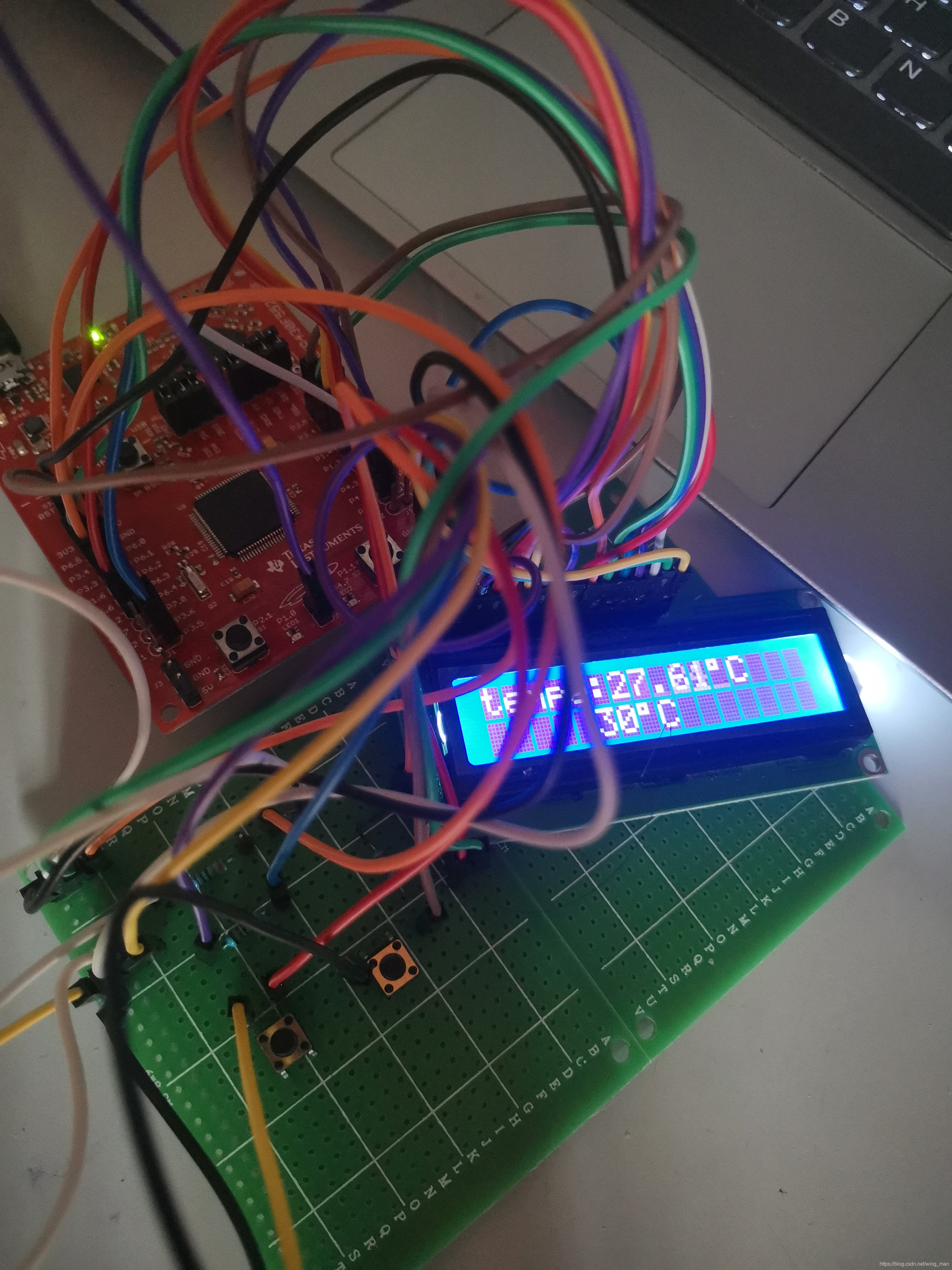
结果
注意
如果要更改预警温度,需在光标移动到第一行第六列时按动按键,因为读取按键的方式是查询式,而不是中断。如果想用中断要在ADC12中断服务程序里开启总中断。由于我开启总中断后,总是莫名奇妙跑到别的中断里,而不是P2口按键中断,我也就没有在调试。感兴趣的同学可以尝试。

















 5943
5943

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









