









Tune-A-Video是一个Video Editing任务很好的Baseline, 后续工作例如Control Video都是在这个工作的基础上做的. 本次我们详细阅读一下Tune-A-Video代码中的关键细节, 以及做简单的复现.
关于Video Diffusion模型请参见笔记https://blog.csdn.net/wjpwjpwjp0831/article/details/141689348
代码地址: https://github.com/showlab/Tune-A-Video
0. 模型简要总结
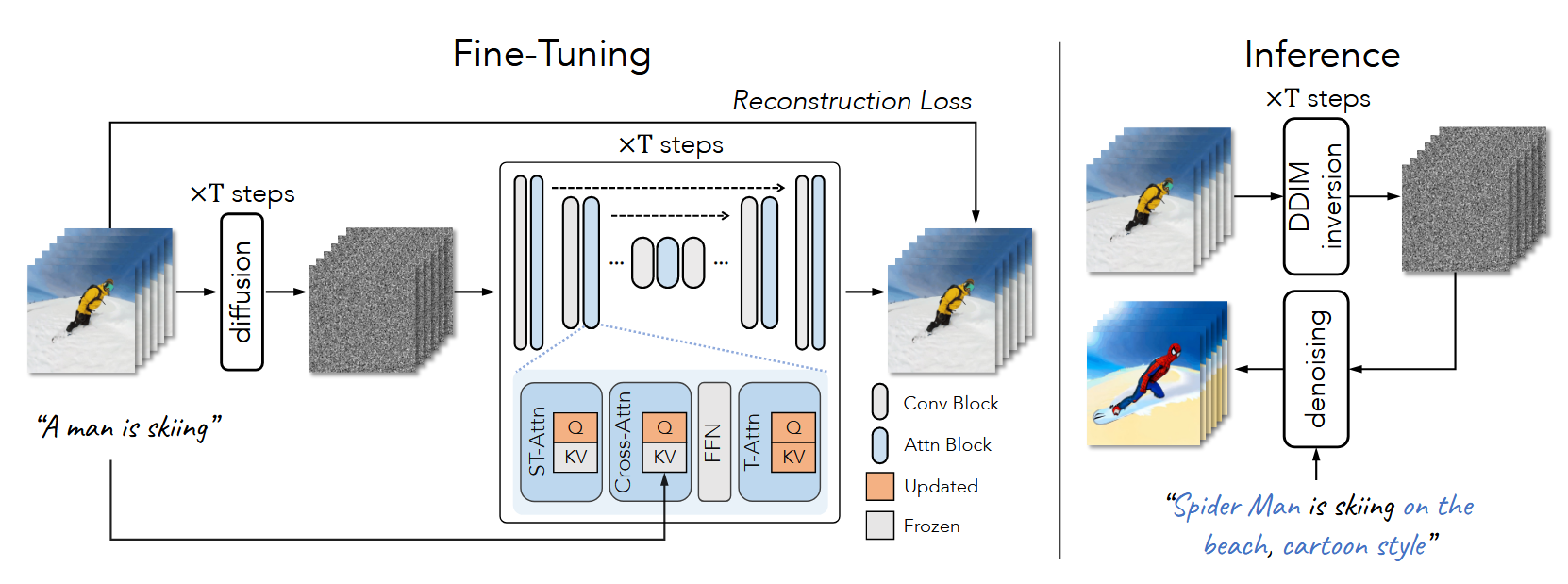
Tune-A-Video通过One-shot的方式, 也就是, 需要对每个你希望编辑的视频, 都需要训练一次. 训练过程只需要待编辑的视频, 不需要其他的, 因为相关的world knowledge是由预训练的Stable Diffusion提供的.
既然是视频生成, 那就必须要约束生成帧的时间一致性. 因此就通过重新设计注意力机制的形式让temporal之间也进行注意力计算, 从而维持一致性. 模型的总框图如下:
下面通过数据读取, 模型细节, 训练过程, 推理过程四部分对代码进行解读
1. 数据读取
由于是one-shot, 因此每次读入一个视频和若干要训练的prompt. 这部分代码比较简单, 这是Dataset类:
def __getitem__(self, index):
# load and sample video frames
vr = decord.VideoReader(self.video_path, width=self.width, height=self.height)
sample_index = list(range(self.sample_start_idx, len(vr), self.sample_frame_rate))[:self.n_sample_frames]
video = vr.get_batch(sample_index)
video = rearrange(video, "f h w c -> f c h w") # f 帧数 c h w 图像维度
example = {
"pixel_values": (video / 127.5 - 1.0), # 归一化到[-1, 1], 注意和常见的归一化到[0, 1]不同
"prompt_ids": self.prompt_ids # None
}
return example
2. 模型细节
我们以基于Stable Diffusion的Tune-A-Video为例. 首先, 基本组成部分有:
- 加噪的Scheduler,
- 去噪的Scheduler,
- 用于文本的Tokenizer,
- 用于进一步提取文本特征的text encoder,
- 将latent和RGB域互相映射的VAE encoder与decoder,
- 以及用于去噪预测的UNet.
加载模型的代码如下:
# Load scheduler, tokenizer and models.
noise_scheduler = DDPMScheduler.from_pretrained(pretrained_model_path, subfolder="scheduler")
tokenizer = CLIPTokenizer.from_pretrained(pretrained_model_path, subfolder="tokenizer")
text_encoder = CLIPTextModel.from_pretrained(pretrained_model_path, subfolder="text_encoder")
vae = AutoencoderKL.from_pretrained(pretrained_model_path, subfolder="vae")
unet = UNet3DConditionModel.from_pretrained_2d(pretrained_model_path, subfolder="unet") # 从image diffusion的2D Unet中加载预训练权重
其中, UNet3DConditionModel是本文的主要贡献, 我们先看加载权重的部分:
@classmethod
def from_pretrained_2d(cls, pretrained_model_path, subfolder=None):
if subfolder is not None:
pretrained_model_path = os.path.join(pretrained_model_path, subfolder)
# 读取模型的config文件 diffusers库是通过config文件储存模型init参数的
config_file = os.path.join(pretrained_model_path, 'config.json')
if not os.path.isfile(config_file):
raise RuntimeError(f"{config_file} does not exist")
with open(config_file, "r") as f:
config = json.load(f)
# 需要按照本次采用的3D Unet修改一些参数
config["_class_name"] = cls.__name__ # 类名
config["down_block_types"] = [ # 下采样和上采样的block需要更改 这也是模型主要修改的地方
"CrossAttnDownBlock3D", # 图中的ST-Attention, Cross Attention和T-Attention在这里
"CrossAttnDownBlock3D",
"CrossAttnDownBlock3D",
"DownBlock3D"
]
config["up_block_types"] = [
"UpBlock3D",
"CrossAttnUpBlock3D",
"CrossAttnUpBlock3D",
"CrossAttnUpBlock3D"
]
from diffusers.utils import WEIGHTS_NAME # 加载权重, 注意WEIGHTS_NAME是固定的名称, 是.bin
# 文件, 如果需要加载safetensors需要更改, 并不能采用torch.load, 而是safetensors.torch.load
model = cls.from_config(config)
model_file = os.path.join(pretrained_model_path, WEIGHTS_NAME)
if not os.path.isfile(model_file):
raise RuntimeError(f"{model_file} does not exist")
state_dict = torch.load(model_file, map_location="cpu")
for k, v in model.state_dict().items():
if '_temp.' in k:
state_dict.update({k: v})
model.load_state_dict(state_dict)
return model
下面我们按照数据流的顺序, 逐层拆分该3D UNet.
2.1 输入
在前向传播过程中, 输入为:
sample: 加噪的latent, shape是(bs, c, f, h, w), 默认为(1, 4, 8, 512, 512), 其中c是4的原因是UNet的输入为VAE编码出的经过加噪后的latent, 而经过VAE编码后维度不是RGB的3, 而是4.timestep: 当前的时间步: 是作为噪声预测模型输入参数之一, 是一个Tensor, 从randint生成而来encoder_hidden_states: 这是文本的特征, 由text encoder生成
代码如下:
def forward(
self,
sample: torch.FloatTensor,
timestep: Union[torch.Tensor, float, int],
encoder_hidden_states: torch.Tensor,
class_labels: Optional[torch.Tensor] = None,
attention_mask: Optional[torch.Tensor] = None,
return_dict: bool = True,
) -> Union[UNet3DConditionOutput, Tuple]:
我们首先需要判断, 当前输入的sample的size是否可以被上下采样倍数整除. 比如, 如果这个UNet有4个上下采样层, 那么sample的size(h和w)就必须是16的倍数. 否则的话, 我们需要强制UNet的上采样输出大小:
default_overall_up_factor = 2**self.num_upsamplers
# upsample size should be forwarded when sample is not a multiple of `default_overall_up_factor`
forward_upsample_size = False
upsample_size = None
if any(s % default_overall_up_factor != 0 for s in sample.shape[-2:]):
logger.info("Forward upsample size to force interpolation output size.")
forward_upsample_size = True
forward_upsample_size会在上采样的时候用到, 用于是否强制输出大小.
2.2 对timestep进行位置编码
下面对timesteps进行embedding. 为了让模型知道当前的去噪进度, 时间步 t 需要作为输入之一. 然而, 直接将 t 作为标量输入并不能有效传递时间序列信息, 因此, 通常会对 t 进行位置编码:
P E ( t , 2 i ) = sin ( t / 1 e 4 2 i / d ) , P E ( t , 2 i + 1 ) = cos ( t / 1 e 4 2 i / d ) PE(t, 2i) = \sin (t/1e4^{2i/d}), PE(t, 2i+1) = \cos (t/1e4^{2i/d}) PE(t,2i)=sin(t/1e42i/d),PE(t,2i+1)=cos(t/1e42i/d)
这样就把一个标量
t
t
t映射到了维度为
d
d
d的向量, 向量的每一维度包含不同频率的正弦或余弦值. 这里直接用diffusers库中的Timestep进行编码:
self.time_proj = Timesteps(block_out_channels[0], flip_sin_to_cos, freq_shift)
# 输入: 要编码的维度, 是否将sin和cos互换(默认为true, 互换后embedding中是先cos后sin, 可能和前面介绍的sin cos交错不一样), 以及维度间频率的差别, 默认为0
# block_out_channels = [320, 640, 1280, 1280], 表示UNet的下采样过程有四个block, 每个block的输出维度分别为320, 640, 1280, 1280
timestep_input_dim = block_out_channels[0]
# 位置编码后, 还需要用几个MLP进一步提取时间特征 time_embed_dim = block_out_channels[0] * 4
self.time_embedding = TimestepEmbedding(timestep_input_dim, time_embed_dim)
在forward中, 执行时间编码:
# broadcast to batch dimension in a way that's compatible with ONNX/Core ML
timesteps = timesteps.expand(sample.shape[0]) # expand相当于扩展维度, 从(1, )扩展到(bs, 1)
t_emb = self.time_proj(timesteps)
# timesteps does not contain any weights and will always return f32 tensors
# but time_embedding might actually be running in fp16. so we need to cast here.
# there might be better ways to encapsulate this.
t_emb = t_emb.to(dtype=self.dtype)
emb = self.time_embedding(t_emb)
2.3 维度初始映射
接下来, 我们首先对sample进行卷积, 将其输出维度变为block_out_channels[0]. 因为我们输入的是多了一个视频帧数维的5维张量, 因此将其转换为2D卷积, 就需要先把f和bs合到一起:
# 定义
self.conv_in = InflatedConv3d(in_channels, block_out_channels[0], kernel_size=3, padding=(1, 1))
其中
class InflatedConv3d(nn.Conv2d):
def forward(self, x):
video_length = x.shape[2]
x = rearrange(x, "b c f h w -> (b f) c h w") # 把f和bs合到一起
x = super().forward(x) # 2D卷积
x = rearrange(x, "(b f) c h w -> b c f h w", f=video_length) # 恢复
return x
在forward中:
sample = self.conv_in(sample) # 这时sample的维度从(1, 4, 8, 512, 512) 变为 (1, 320, 8, 256, 256)
2.4 降采样
随后是经典的降采样和升采样环节. 在降采样中, 经过的block分别为"CrossAttnDownBlock3D", CrossAttnDownBlock3D", "CrossAttnDownBlock3D", "DownBlock3D". 因此前三个是有交叉注意力的, 其需要和文本特征融合, 此外也是本文提出的时空Attention的地方. 后一个是普通的降采样.
在前向传播时, 分别经过这些层的传播过程即可. 对于不同的层有不同的输入, 因此有一个属性判断.
# down
down_block_res_samples = (sample,) # 用于记录中间状态输出, 在上采样层还需要concat
for downsample_block in self.down_blocks:
if hasattr(downsample_block, "has_cross_attention") and downsample_block.has_cross_attention:
sample, res_samples = downsample_block(
hidden_states=sample,
temb=emb, # 时间步embedding
encoder_hidden_states=encoder_hidden_states, # 文本embedding
attention_mask=attention_mask, # 默认为None
)
else:
sample, res_samples = downsample_block(hidden_states=sample, temb=emb)
down_block_res_samples += res_samples
下面分别看这两种Block.
2.4.1 CrossAttnDownBlock3D
每个UNet block整体的结构是, 分若干个层, 每个层的输入输出维度是一样的(第一层除外). 在每个层中, 都是一个ResNet block(这里是ResNet 3D)后面跟一个注意力机制的block(Transformer block).
输入参数如下:
class CrossAttnDownBlock3D(nn.Module):
def __init__(
self,
in_channels: int, # 这个block的输入维度, block之间的输入输出遵循[320, 640, 1280, 1280], 例如如果这是第一个block, in channel就是320
out_channels: int, # 如果是第一个block, out就是640
temb_channels: int, # 前面提到的, 4 * block_out_channels[0] = 1280
dropout: float = 0.0,
num_layers: int = 1, # 采用的是2
resnet_eps: float = 1e-6,
resnet_time_scale_shift: str = "default",
resnet_act_fn: str = "swish",
resnet_groups: int = 32,
resnet_pre_norm: bool = True,
attn_num_head_channels=1, # 默认为8, 做8头注意力机制
cross_attention_dim=1280,
output_scale_factor=1.0,
downsample_padding=1, # 默认为1, kernel size3, stride 1, padding 1为2倍下采样
add_downsample=True, # 在最后下采样一次, 为True
dual_cross_attention=False, # 默认False
use_linear_projection=False, # 默认为False, 这是控制在注意力block中在计算注意力之前是用线性映射还是2D卷积
only_cross_attention=False, # 默认False
upcast_attention=False,
):
在初始化过程中, 按照层数添加ResNet block和Transformer block:
for i in range(num_layers):
in_channels = in_channels if i == 0 else out_channels
resnets.append(
ResnetBlock3D( # 就是用前面的InflatedConv3D 组成的ResNet
in_channels=in_channels,
out_channels=out_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm=resnet_time_scale_shift,
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
pre_norm=resnet_pre_norm,
)
)
if dual_cross_attention:
raise NotImplementedError
attentions.append(
Transformer3DModel(
attn_num_head_channels, # 默认为8, 做8头注意力机制
out_channels // attn_num_head_channels, # 每个头分到的dim
in_channels=out_channels,
num_layers=1,
cross_attention_dim=cross_attention_dim,
norm_num_groups=resnet_groups,
use_linear_projection=use_linear_projection,
only_cross_attention=only_cross_attention,
upcast_attention=upcast_attention,
)
)
self.attentions = nn.ModuleList(attentions)
self.resnets = nn.ModuleList(resnets)
然后添加下采样层, 其实也是由InflatedConv3D 进行卷积下采样的:
if add_downsample:
self.downsamplers = nn.ModuleList(
[
Downsample3D(
out_channels, use_conv=True, out_channels=out_channels, padding=downsample_padding, name="op"
)
]
)
else:
self.downsamplers = None
self.gradient_checkpointing = False
forward过程略去, 顺序就是res1-attn1-res2-attn2-downsample组成的, 如果输入维度是(1, 320, 8, 256, 256), 输出为(1, 640, 8, 128, 128).
然后, 我们看一下关键的Transformer3DModel:
Transformer3DModel由一层基本的Transformer Block组成, 当然还有在输入Transformer block之前的一个投影层(2D卷积), 以及经过Transformer Block之后的另一个投影层, 也是2D卷积. 这两个2D卷积的stride为1, padding为0, kernel size为1, 所以输入和输出的通道数, 与size都是一致的.
在forward过程中, 详细过程注释如下:
def forward(self, hidden_states, encoder_hidden_states=None, timestep=None, return_dict: bool = True):
# 假设输入维度:
# hidden states: (1, 320, 8, 256, 256)
# encoder_hidden_states: (1, 56, 768) 56为具体的句子 tokenizer后的长度 768是CLIP text encoder默认的维度
# timestep: (1, 1280)
assert hidden_states.dim() == 5, f"Expected hidden_states to have ndim=5, but got ndim={hidden_states.dim()}."
video_length = hidden_states.shape[2] # 视频帧长度 8
# 将bs 和 帧数 合在一起
hidden_states = rearrange(hidden_states, "b c f h w -> (b f) c h w") # (8, 320, 256, 256)
# 将文本特征也扩展, 让第一维和latent一样
encoder_hidden_states = repeat(encoder_hidden_states, 'b n c -> (b f) n c', f=video_length) # (8, 56, 768)
batch, channel, height, weight = hidden_states.shape
residual = hidden_states
hidden_states = self.norm(hidden_states)
if not self.use_linear_projection: # True
hidden_states = self.proj_in(hidden_states) # 维度不变 (8, 320, 256, 256)
inner_dim = hidden_states.shape[1]
hidden_states = hidden_states.permute(0, 2, 3, 1).reshape(batch, height * weight, inner_dim) # (8, 256*256, 320) 符合Transformer的输入维度
else:
inner_dim = hidden_states.shape[1]
hidden_states = hidden_states.permute(0, 2, 3, 1).reshape(batch, height * weight, inner_dim)
hidden_states = self.proj_in(hidden_states)
# Blocks
for block in self.transformer_blocks: # 遍历一次 block是BasicTransformerBlock
hidden_states = block(
hidden_states,
encoder_hidden_states=encoder_hidden_states,
timestep=timestep,
video_length=video_length
) # (8, 256*256, 320)
# Output
if not self.use_linear_projection: # True
hidden_states = (
hidden_states.reshape(batch, height, weight, inner_dim).permute(0, 3, 1, 2).contiguous() # (8, 320, 256, 256)
)
hidden_states = self.proj_out(hidden_states) # (8, 320, 256, 256)
else:
hidden_states = self.proj_out(hidden_states)
hidden_states = (
hidden_states.reshape(batch, height, weight, inner_dim).permute(0, 3, 1, 2).contiguous()
)
output = hidden_states + residual
output = rearrange(output, "(b f) c h w -> b c f h w", f=video_length) # (1, 320, 8, 256, 256)
if not return_dict:
return (output,)
return Transformer3DModelOutput(sample=output)
下面重点介绍一下BasicTransformerBlock, 里面包含了该工作的三个关键设计: ST-Attn, Cross-Attn和T-Attn. 注意, 在总体框图中, ST-Attn只更新Q, Cross-Attn也只更新Q, 而T-Attn同时更新Q和K, V. 这是通过是否冻结线性映射
W
Q
,
W
K
和
W
V
W^Q, W^K和W^V
WQ,WK和WV实现的, 而在不同维度(时空维)做注意力, 本质上也是通过排列张量维度实现的. 后面的代码还很长, 这里就只放关键部分了:
BasicTransformerBlock的forward:
def forward(self, hidden_states, encoder_hidden_states=None, timestep=None, attention_mask=None, video_length=None):
# 输入:
# hidden states: (8, 256*256, 320)
# encoder_hidden_states: (8, 56, 768)
# timestep: (1, 1280)
# 这里采用的就是普通的LayerNorm, 没有采用Diffusion Transformer(DiT)中常用的AdaLayerNorm
norm_hidden_states = (
self.norm1(hidden_states, timestep) if self.use_ada_layer_norm else self.norm1(hidden_states)
)
# 第一步: ST-Attention
if self.only_cross_attention: # False
hidden_states = (
self.attn1(norm_hidden_states, encoder_hidden_states, attention_mask=attention_mask) + hidden_states
)
else:
hidden_states = self.attn1(norm_hidden_states, attention_mask=attention_mask, video_length=video_length) + hidden_states
# 第二步: 正常的Cross Attention
if self.attn2 is not None:
# Cross-Attention
norm_hidden_states = (
self.norm2(hidden_states, timestep) if self.use_ada_layer_norm else self.norm2(hidden_states)
)
hidden_states = (
self.attn2(
norm_hidden_states, encoder_hidden_states=encoder_hidden_states, attention_mask=attention_mask
)
+ hidden_states
)
# 一个线性层
hidden_states = self.ff(self.norm3(hidden_states)) + hidden_states
# 第三步: T-Attn
d = hidden_states.shape[1]
# 把时间维度作为sequence的长度 让token在时间维计算注意力
hidden_states = rearrange(hidden_states, "(b f) d c -> (b d) f c", f=video_length)
norm_hidden_states = (
self.norm_temp(hidden_states, timestep) if self.use_ada_layer_norm else self.norm_temp(hidden_states)
)
hidden_states = self.attn_temp(norm_hidden_states) + hidden_states
hidden_states = rearrange(hidden_states, "(b d) f c -> (b f) d c", d=d) # 最后恢复维度
return hidden_states
这里再详细说明一下ST-Attn是怎么计算的. 为了让生成的视频在时空维都具有连续性, 那么在计算注意力机制的时候就需要进行约束, 也就是, 在时间上, 要考虑连续若干帧的特征. 在这里, 作者考虑了初始帧 v 1 v_1 v1, 上一帧 v i − 1 v_{i-1} vi−1与这一帧 v i v_i vi. 将初始帧和上一帧的特征进行concat, 作为 K , V K, V K,V, 并将当前帧的特征作为 Q Q Q, 进行注意力计算, 这样在时空上都进行了信息的融合, 如下所示;
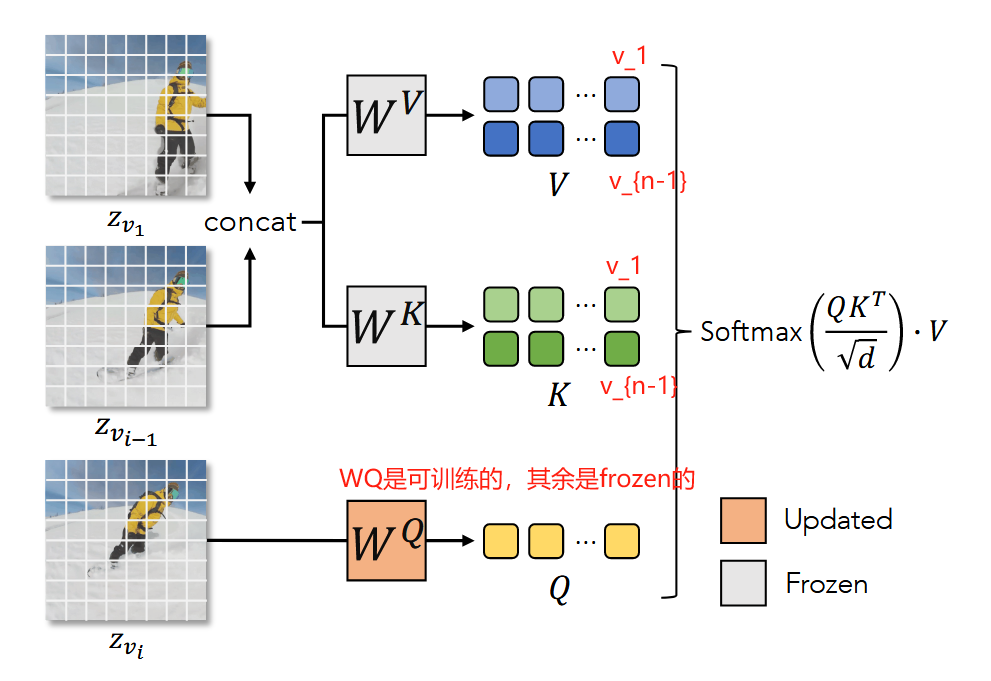
在ST-Attn模块的forward中,
K
,
V
K, V
K,V是这么计算的:
# 表示上一帧的索引
former_frame_index = torch.arange(video_length) - 1 # [-1, 0, 1, ..., n - 1]
former_frame_index[0] = 0 # [0, 0, 1, ...]
key = rearrange(key, "(b f) d c -> b f d c", f=video_length) # 维度从(8, 256*256, 320) 到 (1, 8, 256*256, 320)
# 将第一帧(f维索引为0)和上一帧(f维索引为idx - 1) 在sequence length维 concat起来
key = torch.cat([key[:, [0] * video_length], key[:, former_frame_index]], dim=2)
key = rearrange(key, "b f d c -> (b f) d c") # (8, 2*256*256, 320)
# value 同理
value = rearrange(value, "(b f) d c -> b f d c", f=video_length)
value = torch.cat([value[:, [0] * video_length], value[:, former_frame_index]], dim=2)
value = rearrange(value, "b f d c -> (b f) d c") # (8, 2*256*256, 320)
# 因此QK^T 维度为 (8, 256*256, 2*256*256), Attn score的维度为(8, 256*256, 320)
2.4.2 DownBlock3D
DownBlock3D和CrossAttnDownBlock3D基本一致, 但其每一层只有ResNet block, 而没有Attention Block了. 不再赘述.
2.5 上采样
上采样的整体流程和降采样很相似, 无非是每次hidden states要首先与下采样部分对应block的输出结果concat, 熟悉UNet的同学应该不会陌生. 也就是forward的计算里多了这么几行:
for resnet, attn in zip(self.resnets, self.attentions):
# pop res hidden states
res_hidden_states = res_hidden_states_tuple[-1] # 每次取出downsample对应的hidden state
res_hidden_states_tuple = res_hidden_states_tuple[:-1]
hidden_states = torch.cat([hidden_states, res_hidden_states], dim=1) # concat作为新的
上采样层同样用了前述的各种Attention.
3. 训练
在训练过程中, 我们激活特定的权重, 而将其他权重都冻住. 激活的权重就是本文提出的几个Attention中的映射矩阵:
trainable_modules: Tuple[str] = (
"attn1.to_q",
"attn2.to_q",
"attn_temp",
),
for name, module in unet.named_modules():
if name.endswith(tuple(trainable_modules)):
for params in module.parameters():
params.requires_grad = True
随后进行500轮的训练, 在每一轮中, 我们随机采样视频中的8帧, 以及对应的文本prompt, 按照标准的Diffusion模型训练流程即可:
- 用VAE的encoder提取视频帧特征, 用CLIP的text encoder提取文本特征
- 从标准高斯分布采样噪声 z z z
- 随机采样一个时间步 t t t
- 按照时间步 t t t加噪, 得到noisy latent z t z_t zt
- 用UNet预测初始噪声 z ~ \tilde{z} z~
- 计算Fisher散度, 即 z ~ \tilde{z} z~和 z z z的MSE loss.
- 反向传播. 更新优化器, lr scheduler
4. 推理
注意在使用diffusers库时, 推理过程最好继承DiffusionPipeline类, 在初始化函数也要把UNet, VAE, tokenizer这些都传进来. 遵循的流程也是:
- 用CLIP的text encoder提取文本特征
- 生成随机噪声
- 倒序时间步, 每一步用UNet预测从 t − 1 t-1 t−1到 t t t加的噪声, 并去噪
- 用VAE Decoder生成视频
一个细节: 在训练过程中, 在用VAE encoder提取视觉特征后, 将特征乘以了0.18215:
latents = vae.encode(pixel_values).latent_dist.sample()
latents = rearrange(latents, "(b f) c h w -> b c f h w", f=video_length)
latents = latents * 0.18215
当然, 在去噪过程从latent用VAE decoder生成视频时, 也需要反缩放回去:
def decode_latents(self, latents):
video_length = latents.shape[2]
latents = 1 / 0.18215 * latents
latents = rearrange(latents, "b c f h w -> (b f) c h w")
将 VAE encoder 提取的特征乘以 0.18215 主要是为了将特征空间中的数据缩放到适合 UNet 输入的尺度. VAE 编码器的输出是latent variables, 这些变量的范围通常在一个较大的范围内(通常是接近标准正态分布的范围). 为了让后续的 UNet 模型能够稳定地处理这些潜在变量, 需要对这些特征进行缩放.
6. 运行结果
我们以一个人在滑雪的原始视频为例, 用如下的四个prompt:
- "mickey mouse is skiing on the snow"
- "spider man is skiing on the beach, cartoon style"
- "wonder woman, wearing a cowboy hat, is skiing"
- "a man, wearing pink clothes, is skiing at sunset"
在第100 peoch, 生成结果:

在第300 epoch, 生成结果:

由此可以看出随着时间的增加, 反而偏向于失败. 我认为原因是, 在初期能够生成比较好的结果, 是因为SD有比较好的world knowledge, 而随着采样的增加, 我们训练的约束是原视频, 而不是SD在训练过程中的"目标图像" (因此这种方式的Video editing和SD的训练目标其实是不同的), 因此, 随着MSE loss的监督, 生成的视频只能和原视频越来越像.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









