







一、ccs20.0 下载与安装
Code Composer Studio™ 集成式开发环境 (IDE),适用于 TI 微控制器和处理器的集成开发环境 (IDE)。它包含一整套丰富的工具,用于构建、调试、分析和优化嵌入式应用。
ccs下载地址 链接
安装比较简单,在次略过。
二、MSPM0 SDK安装
MSPM0 SDK最新版本为2.04.00.06,下载链接,下载完成后,直接安装即可。
三、SysConfig 安装
SysConfig 是一个直观而全面的图形实用程序集合,用于配置引脚、外设、无线电、子系统和其他组件。
SysConfig 可助您直观地管理、发现和解决冲突,以便有更多时间创建差异化应用程序。
下载链接,下载完成后安装即可。
将 SysConfig 与 MSPM0 配合使用官方指导文档 高亮提示
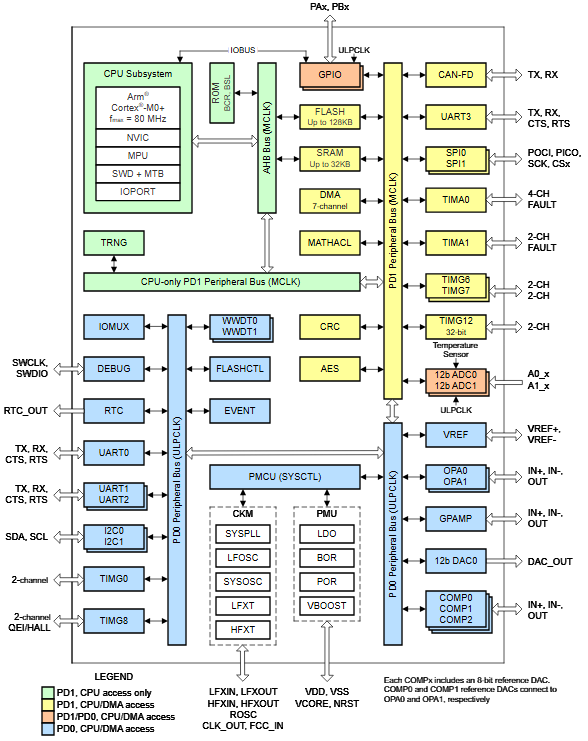
四、MSPM0G3507简介
MSPM0G3507:128KB 闪存、32KB RAM,具有存储器保护单元且频率高达 80MHz 的 Arm 32 位 Cortex-M0+ CPU
- 封装选项
- 64 引脚 LQFP
- 48 引脚 LQFP、VQFN
- 32 引脚 VQFN
- 32 引脚 和 28 引脚 VSSOP
- 时钟系统
- 精度高达 ±1.2% 的内部 4MHz 至 32MHz 振荡器 (SYSOSC)
- 高达 80MHz 的锁相环 (PLL)
- 精度为 ±3% 的内部 32kHz 低频振荡器 (LFOSC)
- 外部 4MHz 至 48MHz 晶体振荡器 (HFXT)
- 外部 32kHz 晶体振荡器 (LFXT)
- 外部时钟输入
- 高性能模拟外设
两个具有总计多达 17 个外部通道的 12 位 4Msps 同步采样模数转换器 (ADC)
硬件均值计算可在 250ksps 下实现 14 位有效分辨率
一个具有集成输出缓冲器的 12 位 1Msps 数模转换器 (DAC)
两个零漂移、零交叉斩波运算放大器 (OPA)
0.5µV/°C 温漂,具有斩波
高达 32x 的集成可编程增益级
一个通用放大器 (GPAMP)
三个具有 8 位基准 DAC 的高速比较器 (COMP)
高速模式下传播延迟为 32ns
支持低至 0.7µA 的低功耗模式运行
ADC、OPA、COMP 和 DAC 之间的可编程模拟连接
可配置的 1.4V 和 2.5V 内部共享基准电压 (VREF)
集成温度传感器
集成电源监测器 - 经优化的低功耗模式
RUN:101µA/MHz (CoreMark)
SLEEP:487µA/4MHz
STOP:47µA/32kHz
STANDBY:1.5µA,具有 RTC 和 SRAM 保留功能
SHUTDOWN:80nA,具有 IO 唤醒能力 - 智能数字外设
7 通道 DMA 控制器
数学加速器支持 DIV、SQRT、MAC 和 TRIG 计算
七个计时器,支持多达 22 个 PWM 通道
一个 16 位通用计时器
一个 16 位通用计时器支持 QEI
两个 16 位通用计时器支持 STANDBY 模式下的低功耗运行
一个 32 位高分辨率通用计时器
两个具有死区支持和多达 12 个 PWM 通道的 16 位高级计时器
两个窗口式看门狗计时器
具有报警和日历模式的 RTC - 增强型通信接口
四个 UART 接口;一个支持 LIN、IrDA、DALI、Smart Card、Manchester,三个支持 STANDBY 模式下的低功耗运行
两个 I2C 接口支持 FM+ (1Mbit/s)、SMBus/PMBus 以及从 STOP 模式唤醒
两个 SPI,一个 SPI 支持高达 32Mbit/s 的速率
一个控制器局域网 (CAN) 接口支持 CAN 2.0 A 或 B 以及 CAN-FD
五 ccs启动与配置
启动ccs后
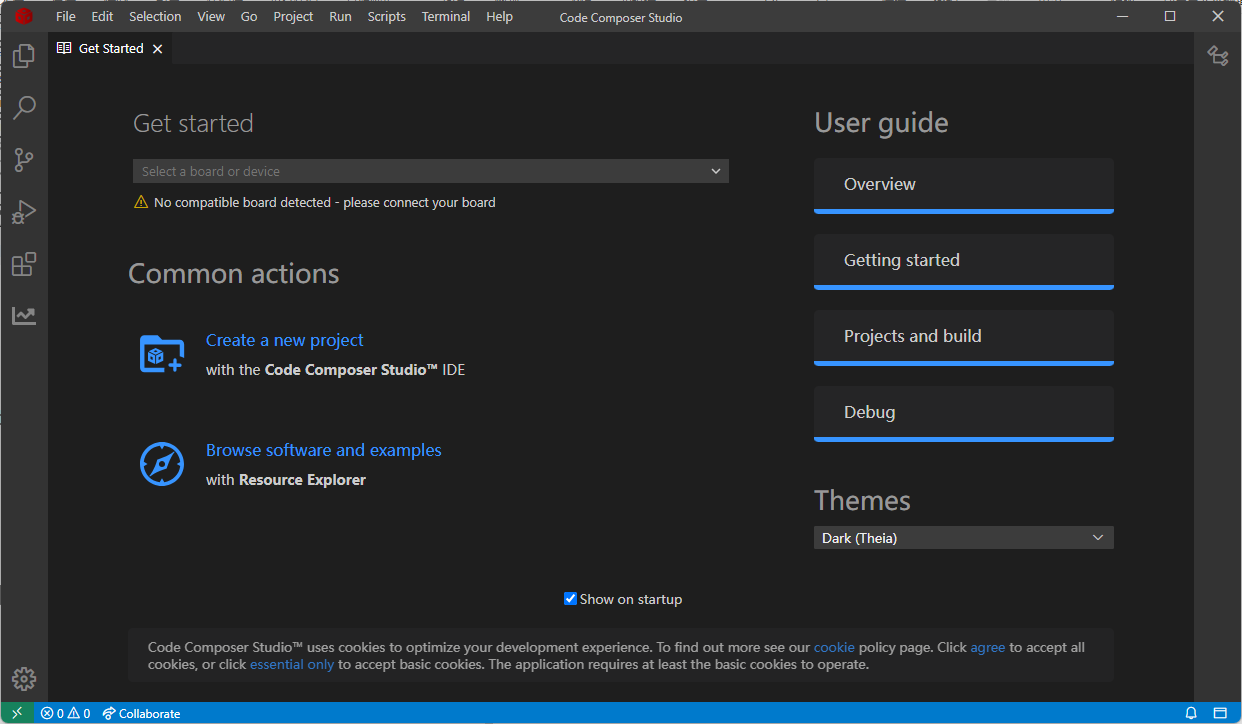
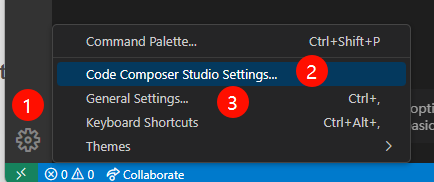
单击左下角的齿轮,可以对ccs软件进行配置,主要配置项有Code Composer Studio Settings和General Setting。
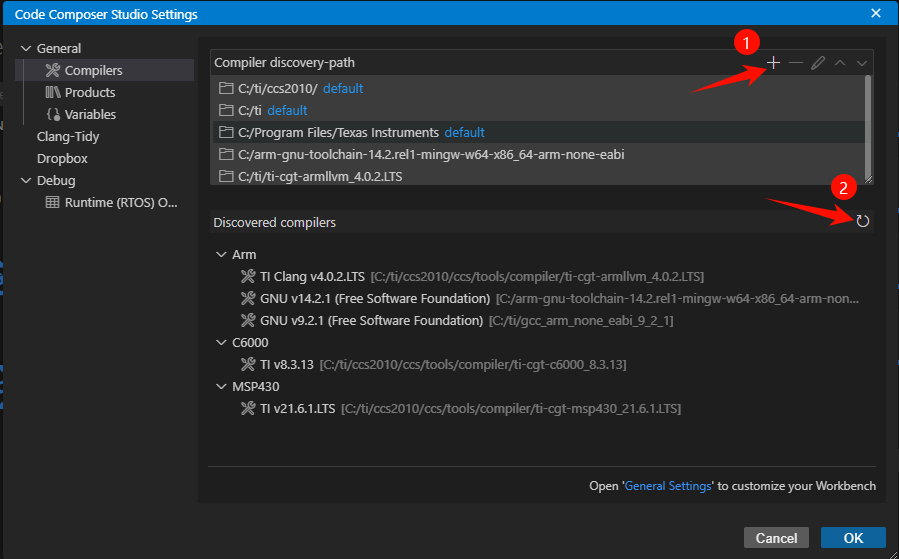
5.1 Code Composer Studio Settings 添加自定义(第三方)编译器
事先下载并安装好第三方编译器并记录编译器位置。
①打开 Code Composer Studio Settings 窗口,在general->compilers中,下图①的位置,单击“+”,添加编译器所在文件夹路径。
② 在图中②的位置单击刷新,在Discovered compilers中便可以出现搜索到的编译器。
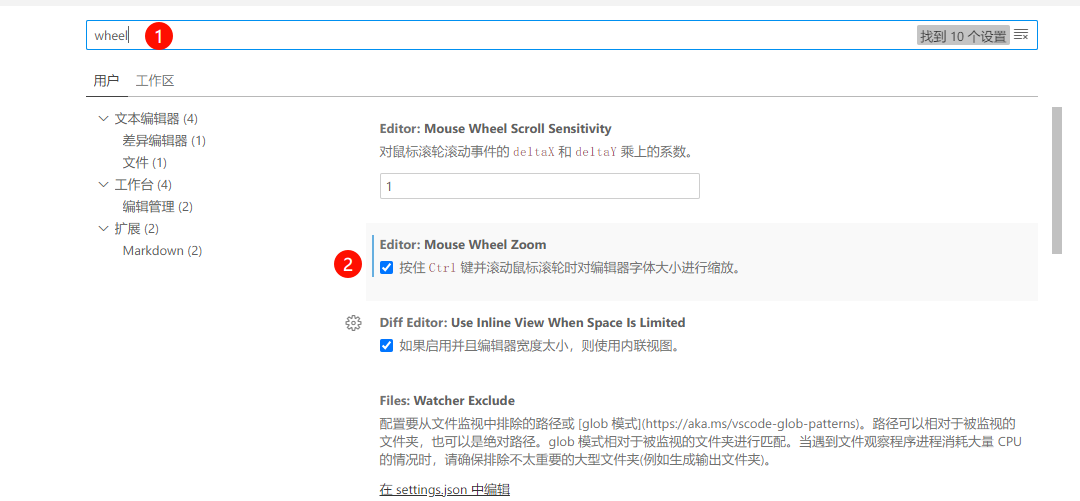
5.2 General Setting
设置ctrl+鼠标滚轮,缩放编辑区字体大小。
5.3 修改界面语言为中文
单击齿轮后选择“命令面板”或者直接快捷键ctrl+shift+p,打开命令面板,输入“config display language”,选择中文。
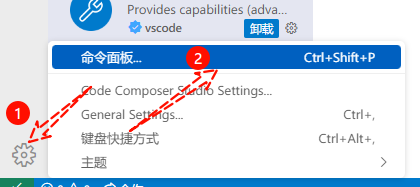


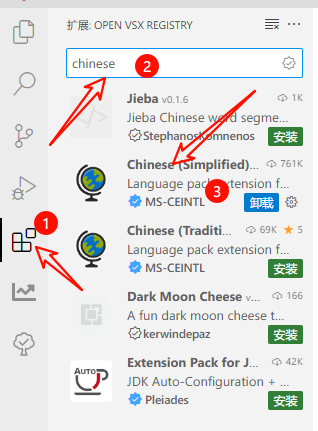
如果没有中文选项,请先安装中文插件。
六 新建工程
在入门 页面,可以通过两种方式新建工程
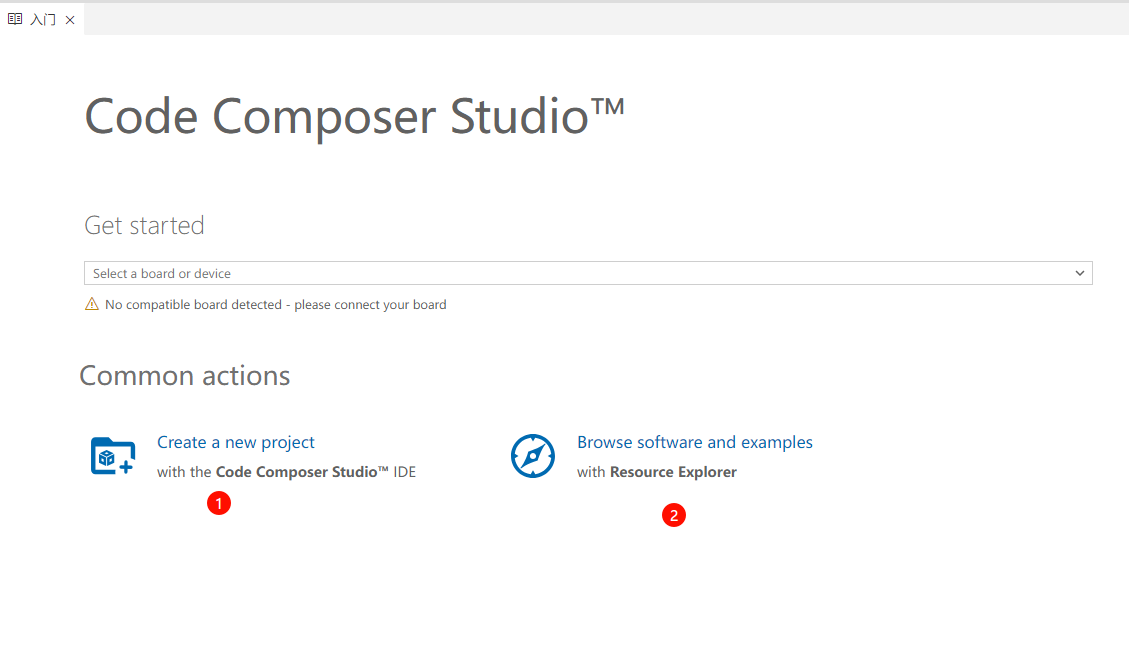
6.1 新建项目
这里以第一种为例,单击create new project
在①处输入关键字,比如芯片的全称,或者ti官方开发板
在②处选择是否使用rtos
在③处选择编译器
还可以再keyword中输入例程对应关键字,进行例程的筛选
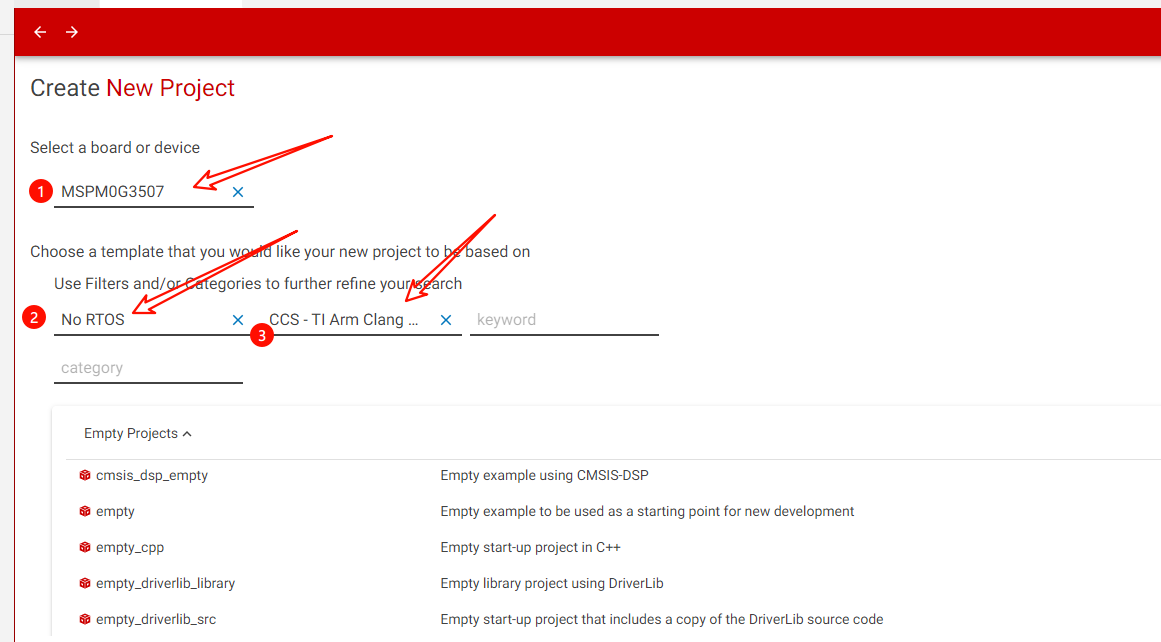
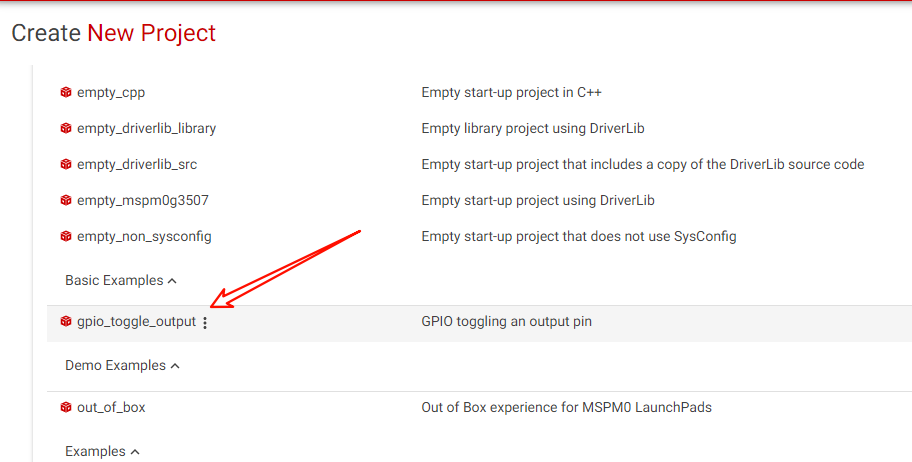
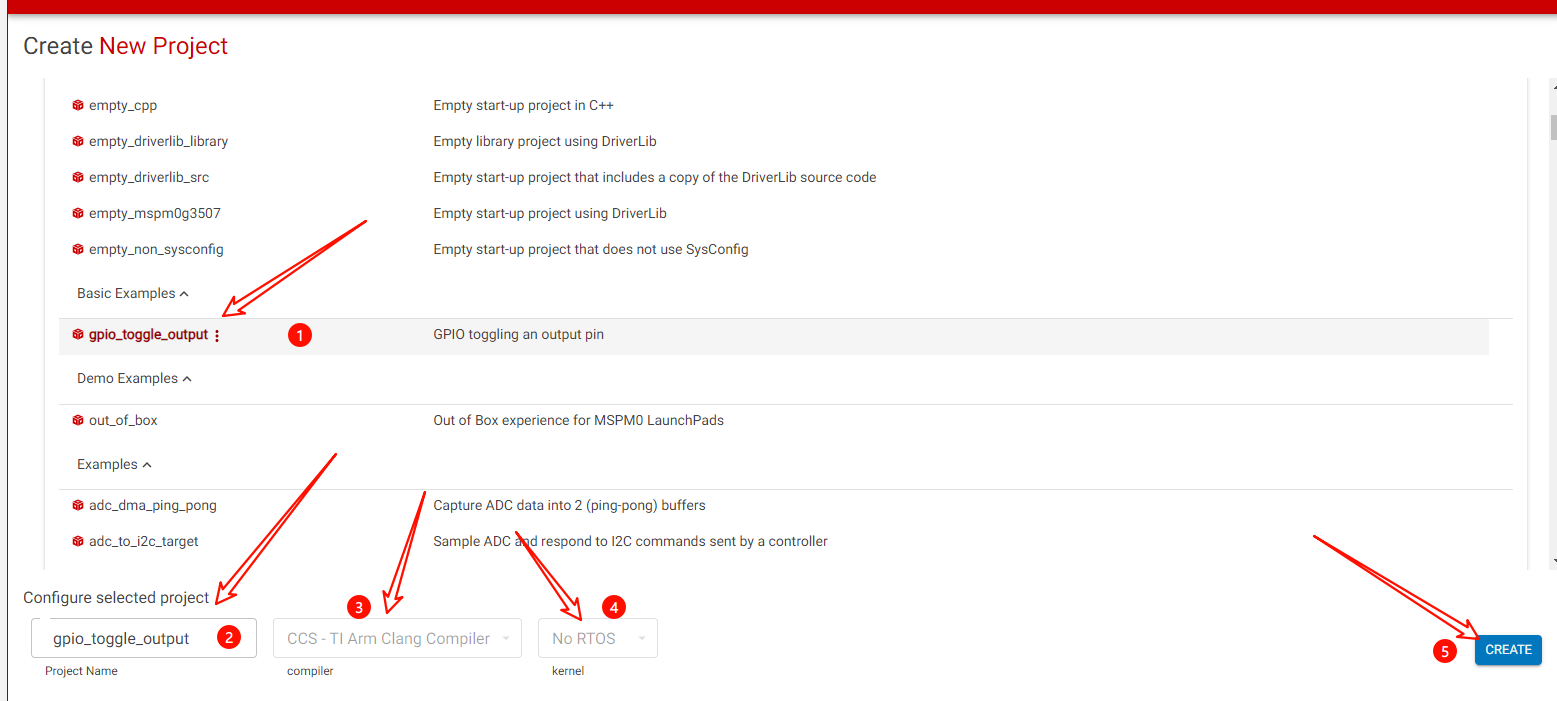
在结果中,选择最简单的gpio-output例程,也就是点灯例程
选择后,在下方会出现工程配置选择结果确认,见②③④,这里直接单击“create”创建。
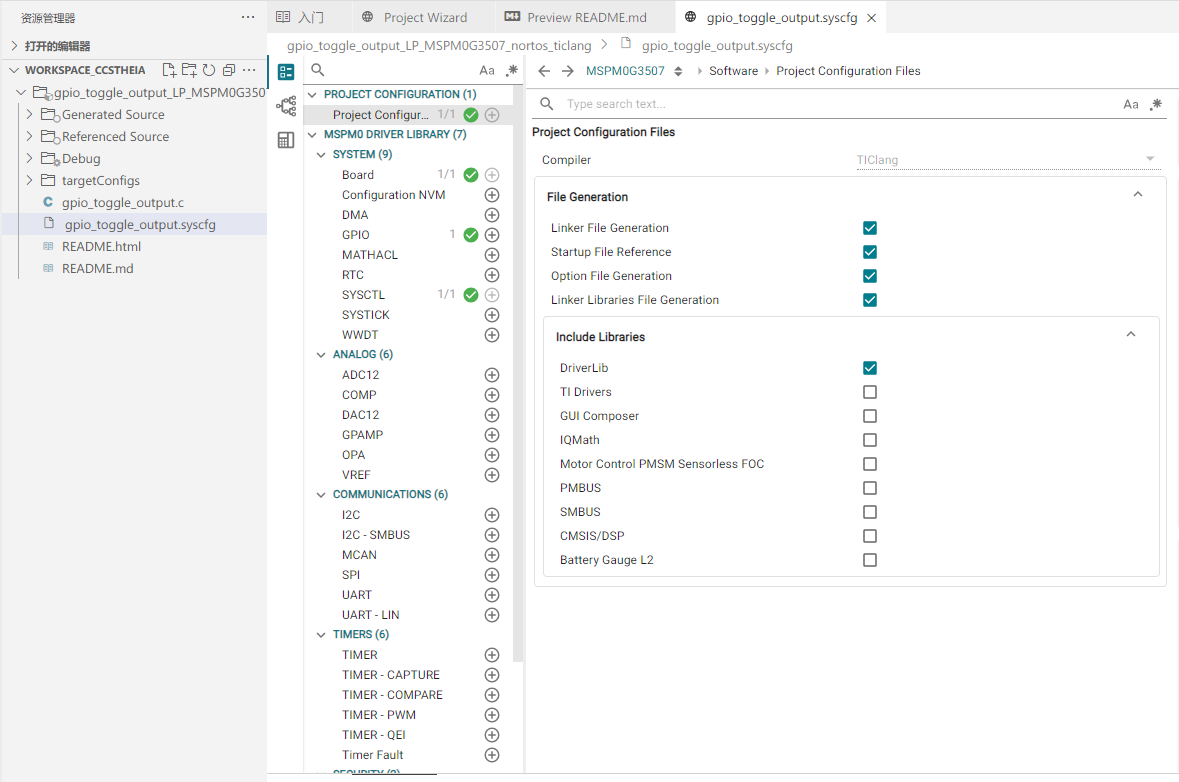
创建项目后,会自动打开项目文件,同时打开config配置页面。
6.2 基于开发板重新配置LED引脚(GPIO配置指南)
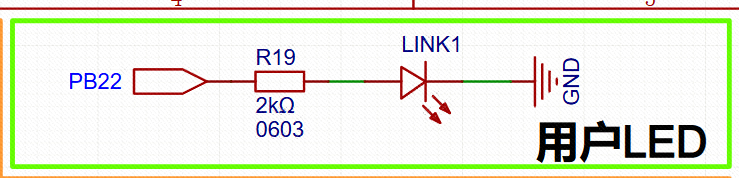
这里基于立创天猛星开发板,下面是led的原理图,由PB22直接驱动,高电平点亮,低电平熄灭。
根据开发板led原理图,对config信息做如下修改:
打开GPIO分组,在右侧单击“remove all”,删除默认配置信息。
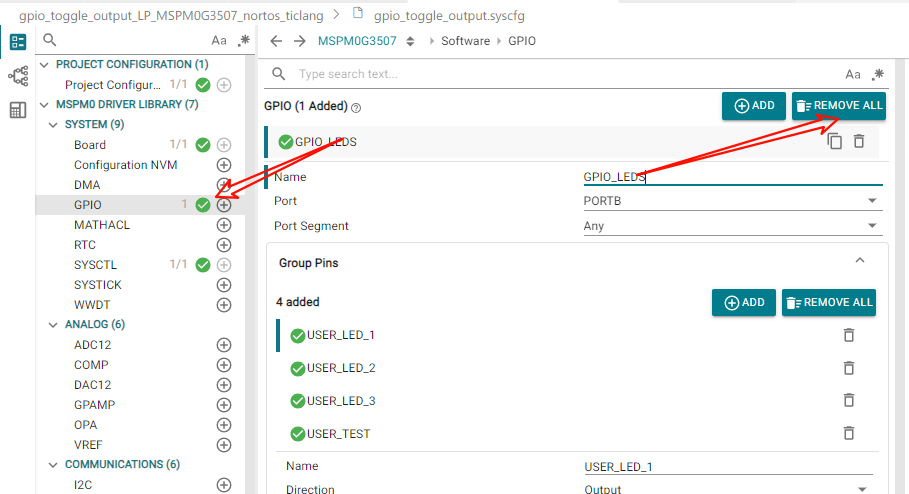
单击ADD,添加一组GPIO(一个分组下,可以配置多个Pin引脚,这一组引脚统一使用①②③的配置)
参数说明
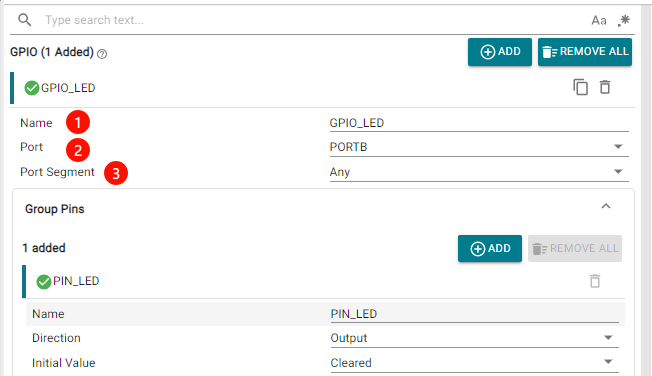
Name :GPIO实例的自定义名称。默认情况下,名称从数字后缀“0”开始;不过,我们可自定义名称以反映模块用途(例如,将 GPIO 命名为“LED1”,这样我们就知道这个引脚是专门用于控制LED)。
Port :GPIO实例在所在端口。LED是接到了GPIOB22引脚,只能选择GPIOB。
Port Segment :设置端口是使用上端口还是下端口。上端口引脚范围16-31,下端口引脚范围0-15。注意该设置,是设置整个GPIOB引脚端口的设置范围。
接下来配置LED引脚信息

参数说明
Name:用户自定义的引脚名称,为了见名知意,也就是引脚的别名。
Direction:设置引脚模式或者说设置方向,有两个选项,输入和输出。
Initial Value:设置引脚的初始状态,只有在配置为输出模式时才可以设置。有两个选项,清除和置位。
IO Structure:设置IO结构。有多个选项,默认(Any)、标准(Standard)、唤醒(Standard with Wake)、高速(High-Speed)以及可以容忍5V(5V Tolerant Open Drain)的结构。
Internal Resistor:设置引脚的上下拉电阻。有三个选项,不设置、设置上拉和设置下拉电阻。
Assigned Pin:设置引脚号。要控制哪一个引脚就填写对应的引脚号。
6.3 保存配置 ctrl+s
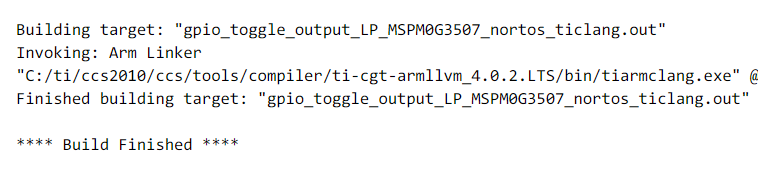
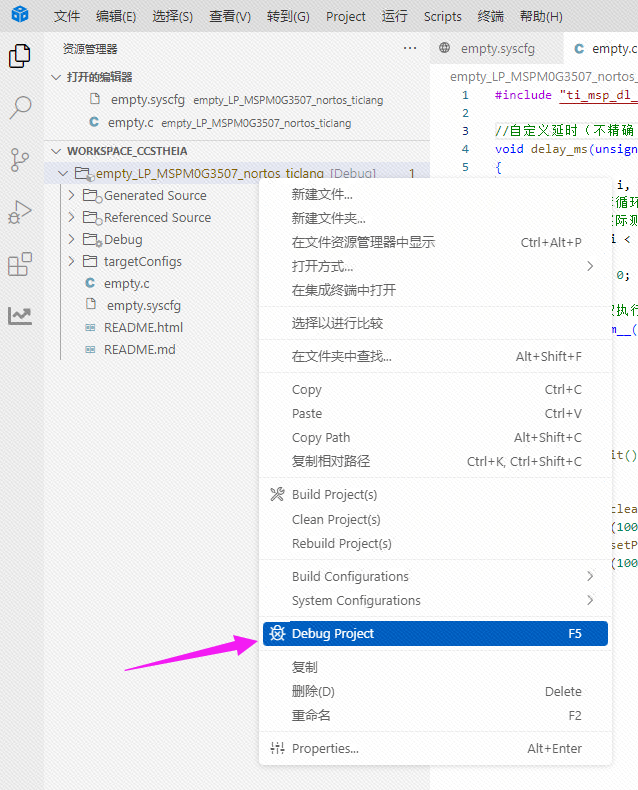
6.4 编译(检查)工程
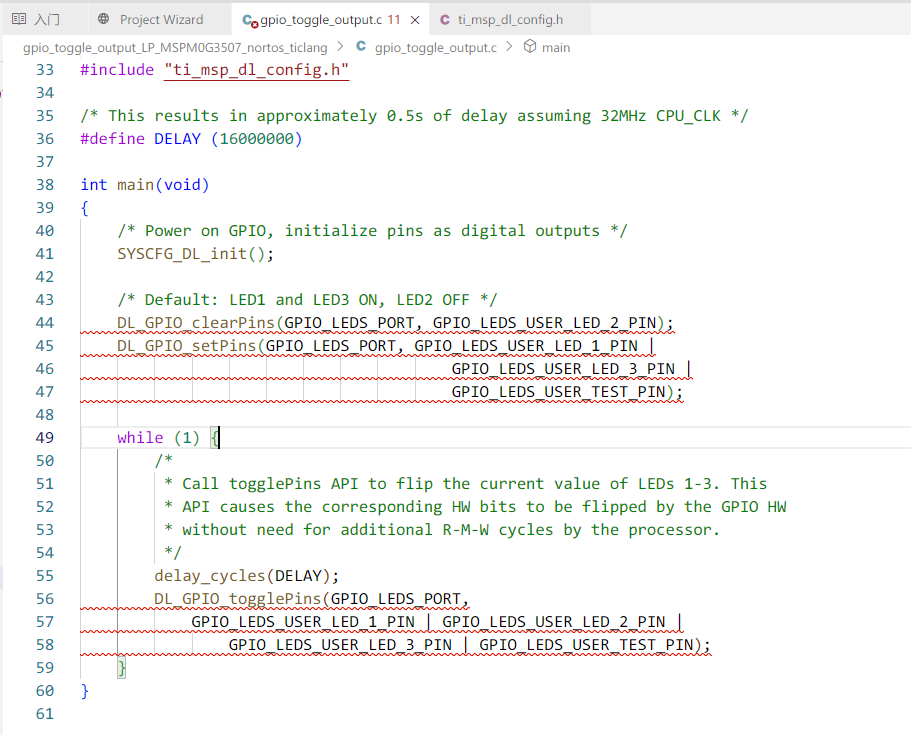
因为是基于gpio-output例程,原例程中默认有输出led引脚,经config配置修改后,原gpio定义就没有了,因此经编译后,程序会报错。
必须编译一次,编译时,ccs才会首先根据配置信息生成对应的引脚的宏定义。
这时,原来的引脚宏定义才会被覆盖。
6.5 修改bug
报错后,不要方。
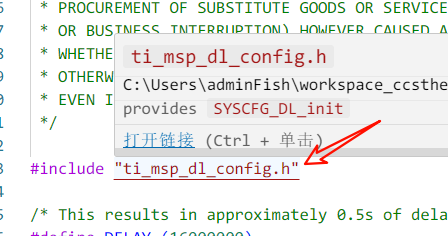
在gpio_toggle_output.c文件顶部,ctrl+左键,打开config.h的头文件,查看最新引脚配置信息。
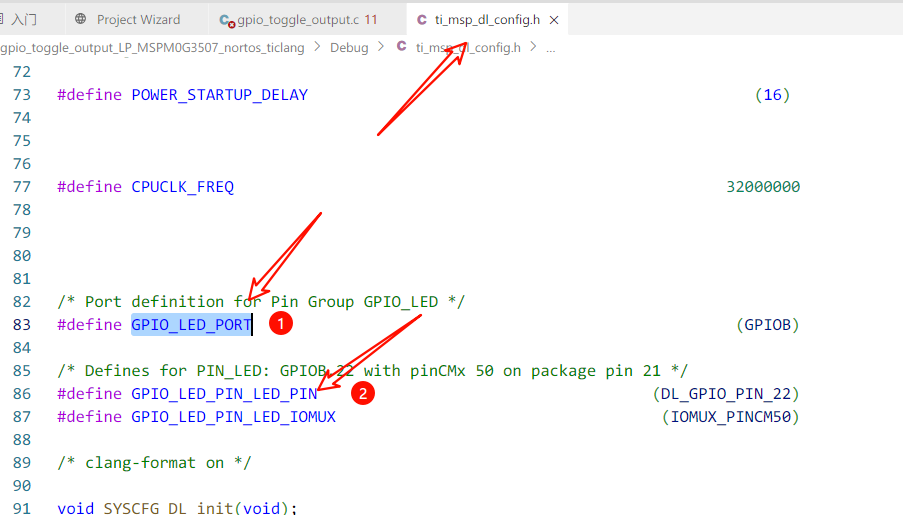
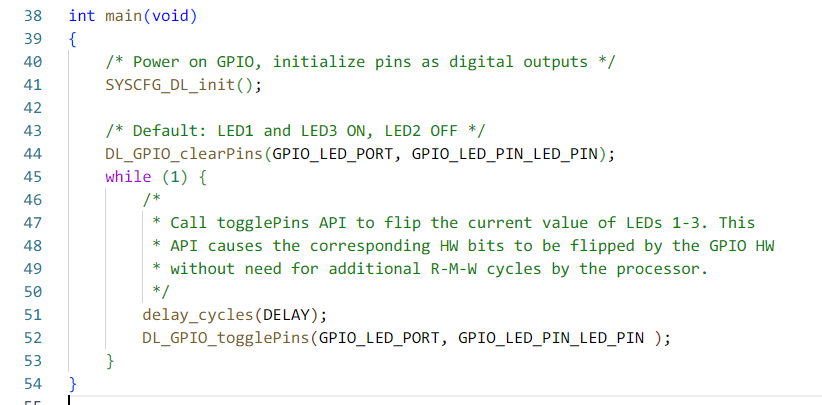
将①和②处的定义,复制并替换掉gpio_toggle_output.c中相对应的内容即可。
经修改并重新编译后,bug消失…
6.6 GPIO DL库控制输出相关函数说明
**相关函数说明**
控制引脚输出高电平(可同时操作多个引脚)
__STATIC_INLINE void DL_GPIO_setPins(GPIO_Regs* gpio, uint32_t pins)
控制引脚输出低电平,(可同时操作多个引脚)
__STATIC_INLINE void DL_GPIO_clearPins(GPIO_Regs* gpio, uint32_t pins)
控制引脚的电平翻转,(可同时操作多个引脚)
__STATIC_INLINE void DL_GPIO_togglePins(GPIO_Regs* gpio, uint32_t pins)
七 下载器配置和仿真
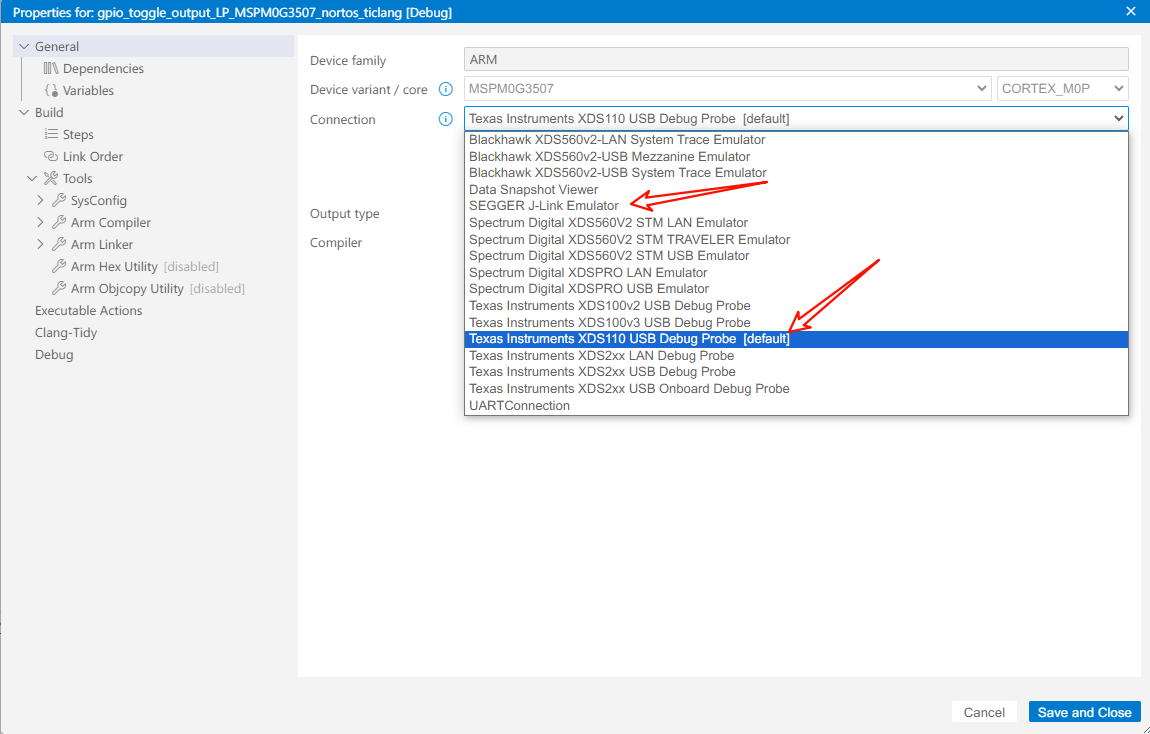
7.1 下载器配置
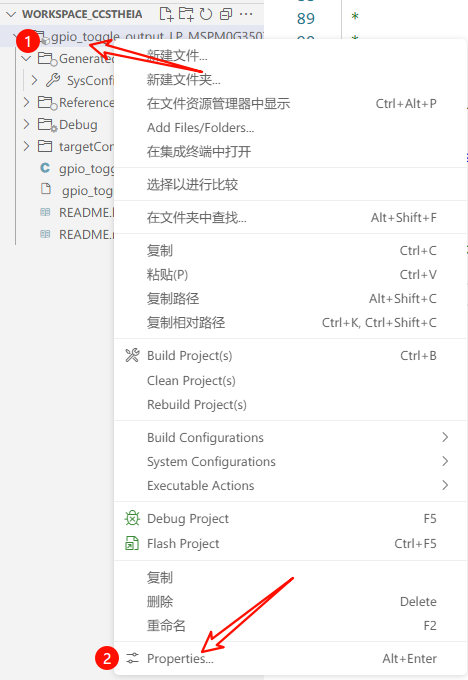
这里选择XDS110
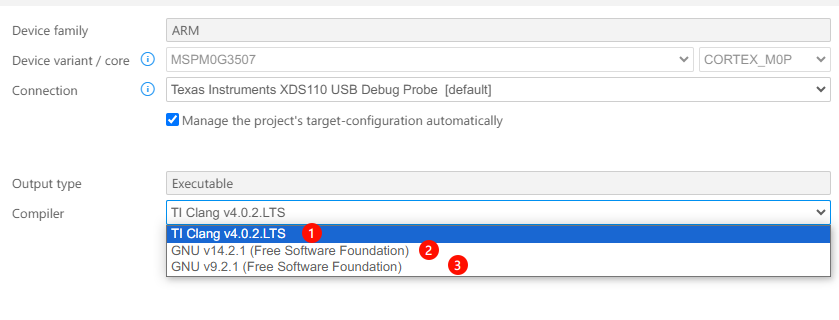
7.2 编译器配置
图中列出了可用的所有编译器列表,其中①和③是ccs20自带的编译器,GNU V14.2.1是另外安装的编译器。
事实是GUN V9生成的代码比GNU V14生成的代码小很多。GUN V9是经TI优化后的。
推荐使用TI CLANG V4.0.2,因为这个编译器版本比较新,2025年的。GUN V9虽然是优化后的,但是很久了…
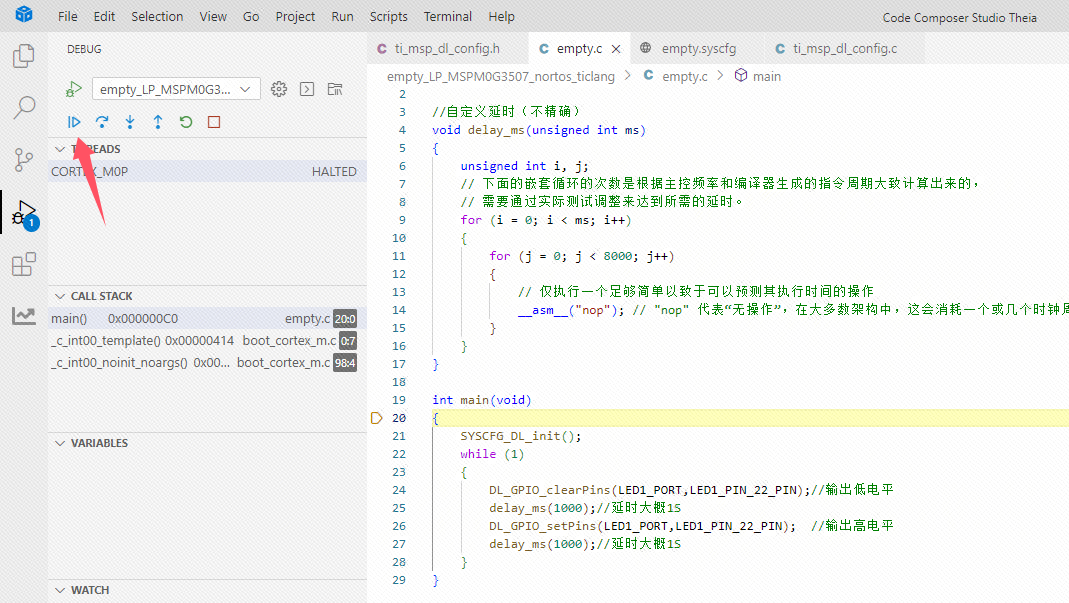
剩下的下载、调试借外图

















 1290
1290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









