






import gym
env = gym.make('Pendulum-v0')

env.seed(1) # reproducible
env = env.unwrapped
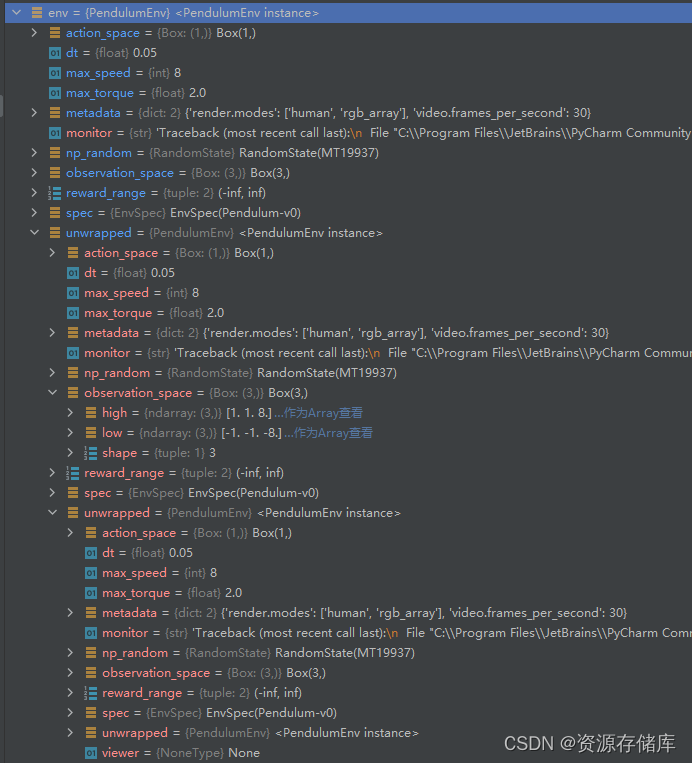
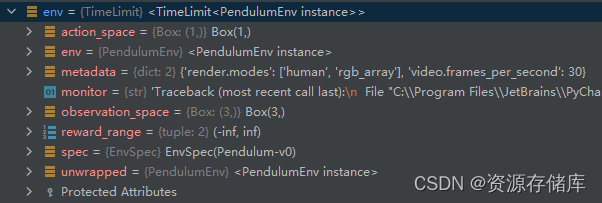
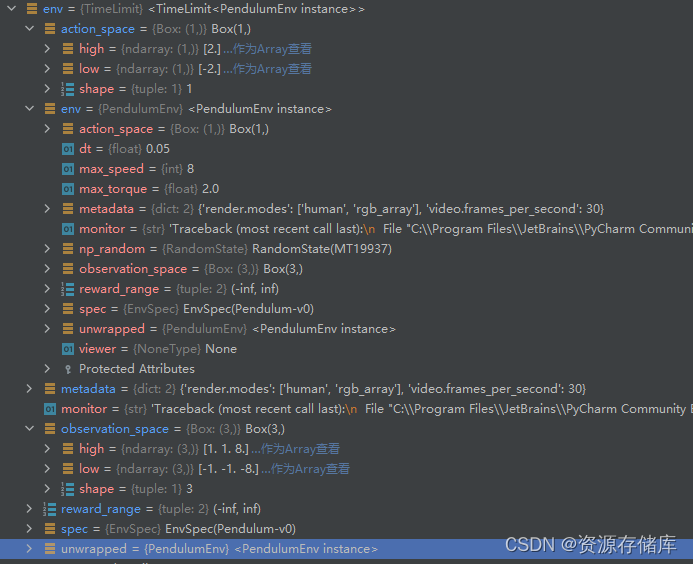
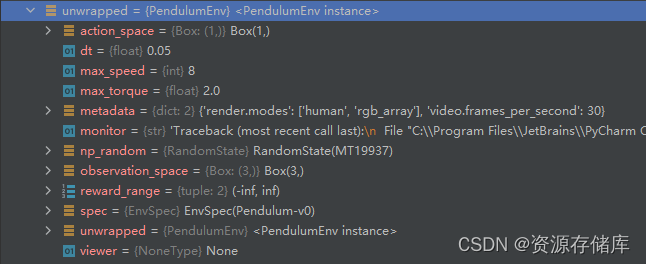
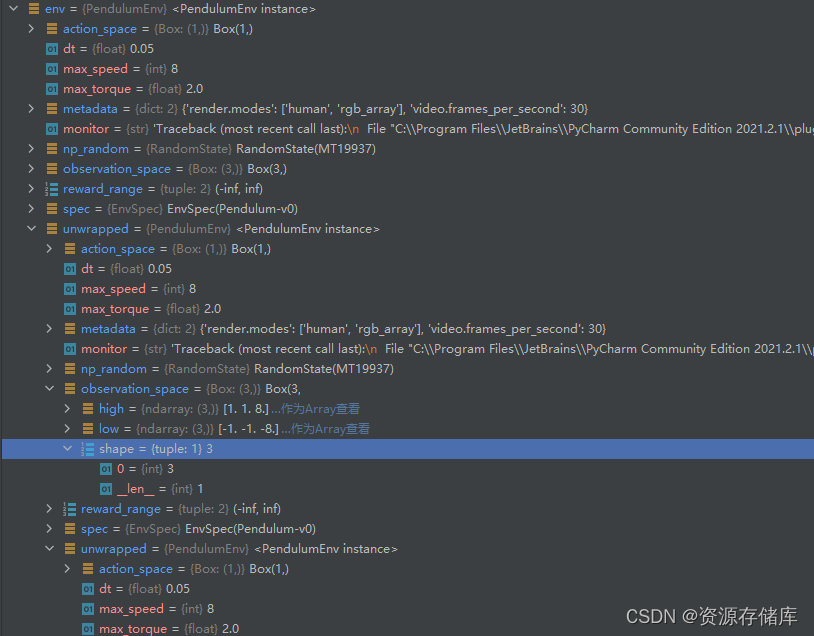
N_S = env.observation_space.shape[0]
A_BOUND = env.action_space.high
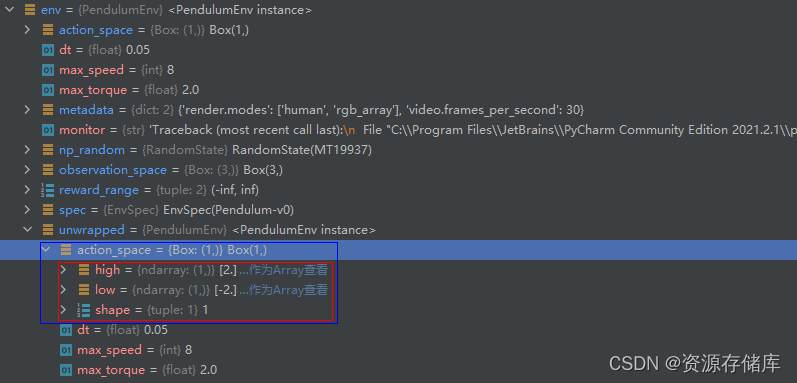
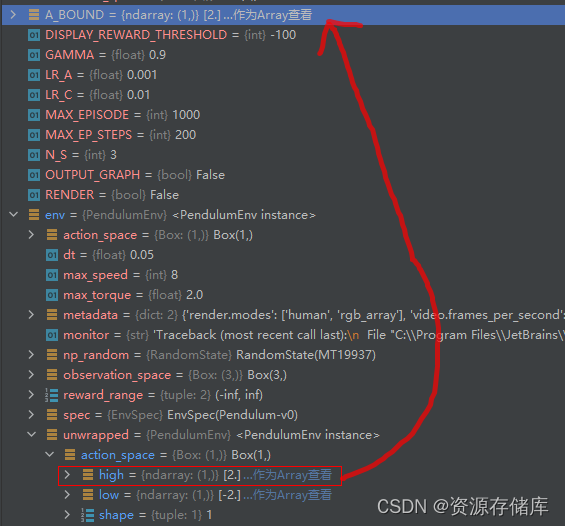
状态空间的维数N_S是3。动作空间的维数是1,且动作上下限是【-2,2】,因上下限数值对称,故取上限high就行
import gym
env = gym.make('Pendulum-v0')
env.seed(1) # reproducible
env = env.unwrapped
N_S = env.observation_space.shape[0]
A_BOUND = env.action_space.high
状态空间的维数N_S是3。动作空间的维数是1,且动作上下限是【-2,2】,因上下限数值对称,故取上限high就行
 997
997











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




























