









 本文围绕RFID读写卡片展开,介绍了读写卡片代码,包括主程序、接线及串口发送主程序注解,如密码设置、数据读写等。还阐述了RFID原理,读卡分控制得电、发送数值、校验密码、读取数值等步骤,组成包括读写器、后端应用和中间件,最后提及配合Labview使用的参考内容。
本文围绕RFID读写卡片展开,介绍了读写卡片代码,包括主程序、接线及串口发送主程序注解,如密码设置、数据读写等。还阐述了RFID原理,读卡分控制得电、发送数值、校验密码、读取数值等步骤,组成包括读写器、后端应用和中间件,最后提及配合Labview使用的参考内容。
rfid 读写卡片代码
目录
rfid主程序注解
main
每个扇区的最后一块储存的就是密码 只要改变她就是改变了密码
用 buf[0]=0x39; 这种形式的代码就是读取或写入数值 s50的卡片每个扇区可以写入一个字节
一个扇区只能写入16个字节要注意的是哪怕你只写入了5个字节她也是读16字节的
最后6位最好不要使用他是用来记录密码的
主程序148行 中的 unsigned char snr, buf[16], TagType[2], SelectedSnr[4], DefaultKey[6] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF}; 其中DefaultKey[6] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF};就是你输入的密吗 初始密码都是 oxff oxff oxff oxff oxff oxff 你不设置的话
现在举一个例子
buf[11]=0x39
buf[12]=0x39
buf[13]=0x39
buf[14]=0x39
buf[15]=0x39
buf[16]=0x40
如果你的DefaultKey[6]没改变还是0xff的话那么rc522是没法读取芯片的 你得改为
DefaultKey[6] = {0x39, 0x39, 0x39, 0x39, 0x39, 0x40};
才能读取密码
如果想知道她的卡号就是
pSnr[IN]这个函数
注意!!!
在读取的时候buf【】数值里是什么数值不重要 s50卡中的数值会在写入时吧buf【】中的数值覆盖
在写入时buf【】数值里的数值就是你要写入卡中的数值!!!
rfid接线注解
NSS 接 PB12
SCK 接 PB14
MOSI 接 PA1
MISO 接 PA11
RST 接 PB7
有一个led可以接也可以不接 如果要接的话
连接 pc13 管教就欧克
注意单片机和rc522走的是spi通讯是不能直接用串口查看的
如有需要串口助手可以查看串口发值.c 和 串口发值.h这两段程序具体使用

如上所示
main
/**
******************************************************************************
* @file Project/STM32F10x_StdPeriph_Template/main.c
* @author MCD Application Team
* @version V3.5.0
* @date 08-April-2011
* @brief Main program body
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SU CH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
#include <stdio.h>
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "mai.h"
#include "mfrc522.h"
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "Key.h"
uint8_t KeyNum;
/** @addtogroup STM32F10x_StdPeriph_Template
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
USART_InitTypeDef USART_InitStructure;
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
void GPIO_ini()
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(MF522_RST_CLK, ENABLE);
/* Configure the GPIO pin */
GPIO_InitStructure.GPIO_Pin = MF522_RST_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(MF522_RST_PORT, &GPIO_InitStructure);
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(MF522_MISO_CLK, ENABLE);
/* Configure the GPIO pin */
GPIO_InitStructure.GPIO_Pin = MF522_MISO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(MF522_MISO_PORT, &GPIO_InitStructure);
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(MF522_MOSI_CLK, ENABLE);
/* Configure the GPIO pin */
GPIO_InitStructure.GPIO_Pin = MF522_MOSI_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(MF522_MOSI_PORT, &GPIO_InitStructure);
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(MF522_SCK_CLK, ENABLE);
/* Configure the GPIO pin */
GPIO_InitStructure.GPIO_Pin = MF522_SCK_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(MF522_SCK_PORT, &GPIO_InitStructure);
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(MF522_NSS_CLK, ENABLE);
/* Configure the GPIO pin */
GPIO_InitStructure.GPIO_Pin = MF522_NSS_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(MF522_NSS_PORT, &GPIO_InitStructure);
/* Enable the GPIO Clock */
RCC_APB2PeriphClockCmd(LED_CLK, ENABLE);
/* Configure the GPIO pin */
GPIO_InitStructure.GPIO_Pin = LED_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(LED_PORT, &GPIO_InitStructure);
}
void InitializeSystem()
{
LED_OFF;
delay_10ms(10);
PcdReset();
PcdAntennaOff();
PcdAntennaOn();
M500PcdConfigISOType( 'A' );
LED_ON;
delay_10ms(10);
LED_OFF;
delay_10ms(10);
LED_ON;
delay_10ms(10);
LED_OFF;
}
/**
* @brief Main program.
* @param None
* @retval None
*/
int main(void)
{
/*!< At this stage the microcontroller clock setting is already configured,
this is done through SystemInit() function which is called from startup
file (startup_stm32f10x_xx.s) before to branch to application main.
To reconfigure the default setting of SystemInit() function, refer to
system_stm32f10x.c file
*/
char status;
unsigned char snr, buf[16], TagType[2], SelectedSnr[4], DefaultKey[6] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF};
unsigned char i;
unsigned char z;
unsigned char q;
unsigned char sun,o[8];
GPIO_ini();
InitializeSystem( );
OLED_Init();
Key_Init();
Serial_Init();
q=0;
z=0;
i=0;
while (1)
{
// q++;
// if (q<=12 )
// {
// for(i=0;i<8;i++)
// {
// o[0]=0x36;
// o[1]=0x15;
// o[5]=0x24;
// Serial_TxPacket[i] = o[i];
// z++;
// o[i+2]=z;
// if(z>=0x9)
// {
// z=2;
// }
// if(i+2==7)
// {
// o[7]=q;
// }
// }
// Serial_SendPacket();
// }
Delay_ms(200);
status= PcdRequest(REQ_ALL,TagType);
if(!status)
{
status = PcdAnticoll(SelectedSnr);
if(!status)
{
status=PcdSelect(SelectedSnr);
if(!status)
{
snr = 1; //扇区号1
status = PcdAuthState(KEYA, (snr*4+3), DefaultKey, SelectedSnr);// 校验1扇区密码,密码位于每一扇区第3块
{
if(!status)
{
buf[0]=0x39;
buf[1]=0X15;
buf[2]=0x08;
buf[3]=0x08;
buf[4]=0x08;
buf[5]=0x08;
buf[6]=0x08;
buf[7]=0x05;
// buf[8]=0X20;
// buf[9]=0x10;
status = PcdRead((snr*4+0), buf); // 读卡,读取1扇区0块数据到buf[0]-buf[16]
// status = PcdWrite((snr*4+0), buf); // 写卡,将buf[0]-buf[16]写入1扇区0块
if(!status)
{
//读写成功,点亮LED
LED_ON;
for(i=0;i<11;i++)
{
Serial_TxPacket[i] = buf[i];
}
Serial_SendPacket();
WaitCardOff();
}
}
}
}
}
}
LED_OFF;
}
}
/**
* @brief Retargets the C library printf function to the USART.
* @param None
* @retval None
*/
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif
/**
* @}
*/
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
rc552.c
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "mai.h"
#include "mfrc522.h"
//#include <string.h>
#define MAXRLEN 18
/
//功 能:寻卡
//参数说明: req_code[IN]:寻卡方式
// 0x52 = 寻感应区内所有符合14443A标准的卡
// 0x26 = 寻未进入休眠状态的卡
// pTagType[OUT]:卡片类型代码
// 0x4400 = Mifare_UltraLight
// 0x0400 = Mifare_One(S50)
// 0x0200 = Mifare_One(S70)
// 0x0800 = Mifare_Pro(X)
// 0x4403 = Mifare_DESFire
//返 回: 成功返回MI_OK
/
char PcdRequest(unsigned char req_code,unsigned char *pTagType)
{
char status;
unsigned int unLen;
unsigned char ucComMF522Buf[MAXRLEN];
// unsigned char xTest ;
ClearBitMask(Status2Reg,0x08);
WriteRawRC(BitFramingReg,0x07);
// xTest = ReadRawRC(BitFramingReg);
// if(xTest == 0x07 )
// { LED_GREEN =0 ;}
// else {LED_GREEN =1 ;while(1){}}
SetBitMask(TxControlReg,0x03);
ucComMF522Buf[0] = req_code;
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,1,ucComMF522Buf,&unLen);
// if(status == MI_OK )
// { LED_GREEN =0 ;}
// else {LED_GREEN =1 ;}
if ((status == MI_OK) && (unLen == 0x10))
{
*pTagType = ucComMF522Buf[0];
*(pTagType+1) = ucComMF522Buf[1];
}
else
{ status = MI_ERR; }
return status;
}
/
//功 能:防冲撞
//参数说明: pSnr[OUT]:卡片序列号,4字节
//返 回: 成功返回MI_OK
/
char PcdAnticoll(unsigned char *pSnr)
{
char status;
unsigned char i,snr_check=0;
unsigned int unLen;
unsigned char ucComMF522Buf[MAXRLEN];
ClearBitMask(Status2Reg,0x08);
WriteRawRC(BitFramingReg,0x00);
ClearBitMask(CollReg,0x80);
ucComMF522Buf[0] = PICC_ANTICOLL1;
ucComMF522Buf[1] = 0x20;
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,2,ucComMF522Buf,&unLen);
if (status == MI_OK)
{
for (i=0; i<4; i++)
{
*(pSnr+i) = ucComMF522Buf[i];
snr_check ^= ucComMF522Buf[i];
}
if (snr_check != ucComMF522Buf[i])
{ status = MI_ERR; }
}
SetBitMask(CollReg,0x80);
return status;
}
/
//功 能:选定卡片
//参数说明: pSnr[IN]:卡片序列号,4字节
//返 回: 成功返回MI_OK
/
char PcdSelect(unsigned char *pSnr)
{
char status;
unsigned char i;
unsigned int unLen;
unsigned char ucComMF522Buf[MAXRLEN];
ucComMF522Buf[0] = PICC_ANTICOLL1;
ucComMF522Buf[1] = 0x70;
ucComMF522Buf[6] = 0;
for (i=0; i<4; i++)
{
ucComMF522Buf[i+2] = *(pSnr+i);
ucComMF522Buf[6] ^= *(pSnr+i);
}
CalulateCRC(ucComMF522Buf,7,&ucComMF522Buf[7]);
ClearBitMask(Status2Reg,0x08);
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,9,ucComMF522Buf,&unLen);
if ((status == MI_OK) && (unLen == 0x18))
{ status = MI_OK; }
else
{ status = MI_ERR; }
return status;
}
/
//功 能:验证卡片密码
//参数说明: auth_mode[IN]: 密码验证模式
// 0x60 = 验证A密钥
// 0x61 = 验证B密钥
// addr[IN]:块地址
// pKey[IN]:密码
// pSnr[IN]:卡片序列号,4字节
//返 回: 成功返回MI_OK
/
char PcdAuthState(unsigned char auth_mode,unsigned char addr,unsigned char *pKey,unsigned char *pSnr)
{
char status;
unsigned int unLen;
unsigned char i,ucComMF522Buf[MAXRLEN];
ucComMF522Buf[0] = auth_mode;
ucComMF522Buf[1] = addr;
for (i=0; i<6; i++)
{ ucComMF522Buf[i+2] = *(pKey+i); }
for (i=0; i<6; i++)
{ ucComMF522Buf[i+8] = *(pSnr+i); }
// memcpy(&ucComMF522Buf[2], pKey, 6);
// memcpy(&ucComMF522Buf[8], pSnr, 4);
status = PcdComMF522(PCD_AUTHENT,ucComMF522Buf,12,ucComMF522Buf,&unLen);
if ((status != MI_OK) || (!(ReadRawRC(Status2Reg) & 0x08)))
{ status = MI_ERR; }
return status;
}
/
//功 能:读取M1卡一块数据
//参数说明: addr[IN]:块地址
// pData[OUT]:读出的数据,16字节
//返 回: 成功返回MI_OK
/
char PcdRead(unsigned char addr,unsigned char *pData)
{
char status;
unsigned int unLen;
unsigned char i,ucComMF522Buf[MAXRLEN];
ucComMF522Buf[0] = PICC_READ;
ucComMF522Buf[1] = addr;
CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);
if ((status == MI_OK) && (unLen == 0x90))
// { memcpy(pData, ucComMF522Buf, 16); }
{
for (i=0; i<16; i++)
{ *(pData+i) = ucComMF522Buf[i]; }
}
else
{ status = MI_ERR; }
return status;
}
/
//功 能:写数据到M1卡一块
//参数说明: addr[IN]:块地址
// pData[IN]:写入的数据,16字节
//返 回: 成功返回MI_OK
/
char PcdWrite(unsigned char addr,unsigned char *pData)
{
char status;
unsigned int unLen;
unsigned char i,ucComMF522Buf[MAXRLEN];
ucComMF522Buf[0] = PICC_WRITE;
ucComMF522Buf[1] = addr;
CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);
if ((status != MI_OK) || (unLen != 4) || ((ucComMF522Buf[0] & 0x0F) != 0x0A))
{ status = MI_ERR; }
if (status == MI_OK)
{
//memcpy(ucComMF522Buf, pData, 16);
for (i=0; i<16; i++)
{ ucComMF522Buf[i] = *(pData+i); }
CalulateCRC(ucComMF522Buf,16,&ucComMF522Buf[16]);
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,18,ucComMF522Buf,&unLen);
if ((status != MI_OK) || (unLen != 4) || ((ucComMF522Buf[0] & 0x0F) != 0x0A))
{ status = MI_ERR; }
}
return status;
}
/
//功 能:命令卡片进入休眠状态
//返 回: 成功返回MI_OK
/
char PcdHalt(void)
{
unsigned int unLen;
unsigned char ucComMF522Buf[MAXRLEN];
ucComMF522Buf[0] = PICC_HALT;
ucComMF522Buf[1] = 0;
CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);
PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);
return MI_OK;
}
/
//用MF522计算CRC16函数
/
void CalulateCRC(unsigned char *pIndata,unsigned char len,unsigned char *pOutData)
{
unsigned char i,n;
ClearBitMask(DivIrqReg,0x04);
WriteRawRC(CommandReg,PCD_IDLE);
SetBitMask(FIFOLevelReg,0x80);
for (i=0; i<len; i++)
{ WriteRawRC(FIFODataReg, *(pIndata+i)); }
WriteRawRC(CommandReg, PCD_CALCCRC);
i = 0xFF;
do
{
n = ReadRawRC(DivIrqReg);
i--;
}
while ((i!=0) && !(n&0x04));
pOutData[0] = ReadRawRC(CRCResultRegL);
pOutData[1] = ReadRawRC(CRCResultRegM);
}
/
//功 能:复位RC522
//返 回: 成功返回MI_OK
/
char PcdReset(void)
{
RST_H;
delay_10ms(1);
RST_L;
delay_10ms(1);
RST_H;
delay_10ms(10);
if(ReadRawRC(0x02) == 0x80)
{
LED_ON;
delay_10ms(10);
LED_OFF;
delay_10ms(10);
LED_ON;
delay_10ms(10);
LED_OFF;
delay_10ms(10);
}
WriteRawRC(CommandReg,PCD_RESETPHASE);
WriteRawRC(ModeReg,0x3D); //和Mifare卡通讯,CRC初始值0x6363
WriteRawRC(TReloadRegL,30);
WriteRawRC(TReloadRegH,0);
WriteRawRC(TModeReg,0x8D);
WriteRawRC(TPrescalerReg,0x3E);
WriteRawRC(TxAutoReg,0x40);
return MI_OK;
}
//
//设置RC632的工作方式
//
char M500PcdConfigISOType(unsigned char type)
{
if (type == 'A') //ISO14443_A
{
ClearBitMask(Status2Reg,0x08);
/* WriteRawRC(CommandReg,0x20); //as default
WriteRawRC(ComIEnReg,0x80); //as default
WriteRawRC(DivlEnReg,0x0); //as default
WriteRawRC(ComIrqReg,0x04); //as default
WriteRawRC(DivIrqReg,0x0); //as default
WriteRawRC(Status2Reg,0x0);//80 //trun off temperature sensor
WriteRawRC(WaterLevelReg,0x08); //as default
WriteRawRC(ControlReg,0x20); //as default
WriteRawRC(CollReg,0x80); //as default
*/
WriteRawRC(ModeReg,0x3D);//3F
/* WriteRawRC(TxModeReg,0x0); //as default???
WriteRawRC(RxModeReg,0x0); //as default???
WriteRawRC(TxControlReg,0x80); //as default???
WriteRawRC(TxSelReg,0x10); //as default???
*/
WriteRawRC(RxSelReg,0x86);//84
// WriteRawRC(RxThresholdReg,0x84);//as default
// WriteRawRC(DemodReg,0x4D); //as default
// WriteRawRC(ModWidthReg,0x13);//26
WriteRawRC(RFCfgReg,0x7F); //4F
/* WriteRawRC(GsNReg,0x88); //as default???
WriteRawRC(CWGsCfgReg,0x20); //as default???
WriteRawRC(ModGsCfgReg,0x20); //as default???
*/
WriteRawRC(TReloadRegL,30);//tmoLength);// TReloadVal = 'h6a =tmoLength(dec)
WriteRawRC(TReloadRegH,0);
WriteRawRC(TModeReg,0x8D);
WriteRawRC(TPrescalerReg,0x3E);
// PcdSetTmo(106);
delay_10ms(1);
PcdAntennaOn();
}
else{ return (char)-1; }
return MI_OK;
}
/
//功 能:读RC632寄存器
//参数说明:Address[IN]:寄存器地址
//返 回:读出的值
/
unsigned char ReadRawRC(unsigned char Address)
{
unsigned char i, ucAddr;
unsigned char ucResult=0;
NSS_L;
ucAddr = ((Address<<1)&0x7E)|0x80;
for(i=8;i>0;i--)
{
SCK_L;
if(ucAddr&0x80)
MOSI_H;
else
MOSI_L;
SCK_H;
ucAddr <<= 1;
}
for(i=8;i>0;i--)
{
SCK_L;
ucResult <<= 1;
SCK_H;
if(READ_MISO == 1)
ucResult |= 1;
}
NSS_H;
SCK_H;
return ucResult;
}
/
//功 能:写RC632寄存器
//参数说明:Address[IN]:寄存器地址
// value[IN]:写入的值
/
void WriteRawRC(unsigned char Address, unsigned char value)
{
unsigned char i, ucAddr;
SCK_L;
NSS_L;
ucAddr = ((Address<<1)&0x7E);
for(i=8;i>0;i--)
{
if(ucAddr&0x80)
MOSI_H;
else
MOSI_L;
SCK_H;
ucAddr <<= 1;
SCK_L;
}
for(i=8;i>0;i--)
{
if(value&0x80)
MOSI_H;
else
MOSI_L;
SCK_H;
value <<= 1;
SCK_L;
}
NSS_H;
SCK_H;
}
/
//功 能:置RC522寄存器位
//参数说明:reg[IN]:寄存器地址
// mask[IN]:置位值
/
void SetBitMask(unsigned char reg,unsigned char mask)
{
char tmp = 0x0;
tmp = ReadRawRC(reg);
WriteRawRC(reg,tmp | mask); // set bit mask
}
/
//功 能:清RC522寄存器位
//参数说明:reg[IN]:寄存器地址
// mask[IN]:清位值
/
void ClearBitMask(unsigned char reg,unsigned char mask)
{
char tmp = 0x0;
tmp = ReadRawRC(reg);
WriteRawRC(reg, tmp & ~mask); // clear bit mask
}
/
//功 能:通过RC522和ISO14443卡通讯
//参数说明:Command[IN]:RC522命令字
// pInData[IN]:通过RC522发送到卡片的数据
// InLenByte[IN]:发送数据的字节长度
// pOutData[OUT]:接收到的卡片返回数据
// *pOutLenBit[OUT]:返回数据的位长度
/
char PcdComMF522(unsigned char Command,
unsigned char *pInData,
unsigned char InLenByte,
unsigned char *pOutData,
unsigned int *pOutLenBit)
{
char status = MI_ERR;
unsigned char irqEn = 0x00;
unsigned char waitFor = 0x00;
unsigned char lastBits;
unsigned char n;
unsigned int i;
switch (Command)
{
case PCD_AUTHENT:
irqEn = 0x12;
waitFor = 0x10;
break;
case PCD_TRANSCEIVE:
irqEn = 0x77;
waitFor = 0x30;
break;
default:
break;
}
WriteRawRC(ComIEnReg,irqEn|0x80);
ClearBitMask(ComIrqReg,0x80);
WriteRawRC(CommandReg,PCD_IDLE);
SetBitMask(FIFOLevelReg,0x80);
for (i=0; i<InLenByte; i++)
{ WriteRawRC(FIFODataReg, pInData[i]); }
WriteRawRC(CommandReg, Command);
if (Command == PCD_TRANSCEIVE)
{ SetBitMask(BitFramingReg,0x80); }
// i = 600;//根据时钟频率调整,操作M1卡最大等待时间25ms
i = 2000;
do
{
n = ReadRawRC(ComIrqReg);
i--;
}
while ((i!=0) && !(n&0x01) && !(n&waitFor));
ClearBitMask(BitFramingReg,0x80);
if (i!=0)
{
if(!(ReadRawRC(ErrorReg)&0x1B))
{
status = MI_OK;
if (n & irqEn & 0x01)
{ status = MI_NOTAGERR; }
if (Command == PCD_TRANSCEIVE)
{
n = ReadRawRC(FIFOLevelReg);
lastBits = ReadRawRC(ControlReg) & 0x07;
if (lastBits)
{ *pOutLenBit = (n-1)*8 + lastBits; }
else
{ *pOutLenBit = n*8; }
if (n == 0)
{ n = 1; }
if (n > MAXRLEN)
{ n = MAXRLEN; }
for (i=0; i<n; i++)
{ pOutData[i] = ReadRawRC(FIFODataReg); }
}
}
else
{ status = MI_ERR; }
}
SetBitMask(ControlReg,0x80); // stop timer now
WriteRawRC(CommandReg,PCD_IDLE);
return status;
}
/
//开启天线
//每次启动或关闭天险发射之间应至少有1ms的间隔
/
void PcdAntennaOn()
{
unsigned char i;
i = ReadRawRC(TxControlReg);
if (!(i & 0x03))
{
SetBitMask(TxControlReg, 0x03);
}
}
/
//关闭天线
/
void PcdAntennaOff()
{
ClearBitMask(TxControlReg, 0x03);
}
//等待卡离开
void WaitCardOff(void)
{
char status;
unsigned char TagType[2];
while(1)
{
status = PcdRequest(REQ_ALL, TagType);
if(status)
{
status = PcdRequest(REQ_ALL, TagType);
if(status)
{
status = PcdRequest(REQ_ALL, TagType);
if(status)
{
return;
}
}
}
delay_10ms(100);
}
}
///
// Delay 10ms
///
void delay_10ms(unsigned int _10ms)
{
unsigned int i, j;
for(i=0; i<_10ms; i++)
{
for(j=0; j<60000; j++);
}
}
rc522.h
/
//函数原型
/
extern char PcdReset(void);
extern void PcdAntennaOn(void);
extern void PcdAntennaOff(void);
extern char PcdRequest(unsigned char req_code,unsigned char *pTagType);
extern char PcdAnticoll(unsigned char *pSnr);
extern char PcdSelect(unsigned char *pSnr);
extern char PcdAuthState(unsigned char auth_mode,unsigned char addr,unsigned char *pKey,unsigned char *pSnr);
extern char PcdRead(unsigned char addr,unsigned char *pData);
extern char PcdWrite(unsigned char addr,unsigned char *pData);
extern char PcdValue(unsigned char dd_mode,unsigned char addr,unsigned char *pValue);
extern char PcdBakValue(unsigned char sourceaddr, unsigned char goaladdr);
extern char PcdHalt(void);
extern char PcdComMF522(unsigned char Command,
unsigned char *pInData,
unsigned char InLenByte,
unsigned char *pOutData,
unsigned int *pOutLenBit);
extern void CalulateCRC(unsigned char *pIndata,unsigned char len,unsigned char *pOutData);
extern void WriteRawRC(unsigned char Address,unsigned char value);
extern unsigned char ReadRawRC(unsigned char Address);
extern void SetBitMask(unsigned char reg,unsigned char mask);
extern void ClearBitMask(unsigned char reg,unsigned char mask);
extern char M500PcdConfigISOType(unsigned char type);
extern void delay_10ms(unsigned int _10ms);
extern void WaitCardOff(void);
/
//MF522命令字
/
#define PCD_IDLE 0x00 //取消当前命令
#define PCD_AUTHENT 0x0E //验证密钥
#define PCD_RECEIVE 0x08 //接收数据
#define PCD_TRANSMIT 0x04 //发送数据
#define PCD_TRANSCEIVE 0x0C //发送并接收数据
#define PCD_RESETPHASE 0x0F //复位
#define PCD_CALCCRC 0x03 //CRC计算
/
//Mifare_One卡片命令字
/
#define PICC_REQIDL 0x26 //寻天线区内未进入休眠状态
#define PICC_REQALL 0x52 //寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 //防冲撞
#define PICC_ANTICOLL2 0x95 //防冲撞
#define PICC_AUTHENT1A 0x60 //验证A密钥
#define PICC_AUTHENT1B 0x61 //验证B密钥
#define PICC_READ 0x30 //读块
#define PICC_WRITE 0xA0 //写块
#define PICC_DECREMENT 0xC0 //扣款
#define PICC_INCREMENT 0xC1 //充值
#define PICC_RESTORE 0xC2 //调块数据到缓冲区
#define PICC_TRANSFER 0xB0 //保存缓冲区中数据
#define PICC_HALT 0x50 //休眠
/
//MF522 FIFO长度定义
/
#define DEF_FIFO_LENGTH 64 //FIFO size=64byte
/
//MF522寄存器定义
/
// PAGE 0
#define RFU00 0x00
#define CommandReg 0x01
#define ComIEnReg 0x02
#define DivlEnReg 0x03
#define ComIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define RFU0F 0x0F
// PAGE 1
#define RFU10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxAutoReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define RFU1A 0x1A
#define RFU1B 0x1B
#define MifareReg 0x1C
#define RFU1D 0x1D
#define RFU1E 0x1E
#define SerialSpeedReg 0x1F
// PAGE 2
#define RFU20 0x20
#define CRCResultRegM 0x21
#define CRCResultRegL 0x22
#define RFU23 0x23
#define ModWidthReg 0x24
#define RFU25 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsCfgReg 0x28
#define ModGsCfgReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
// PAGE 3
#define RFU30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define RFU3C 0x3C
#define RFU3D 0x3D
#define RFU3E 0x3E
#define RFU3F 0x3F
#define REQ_ALL 0x52
#define KEYA 0x60
/
//和MF522通讯时返回的错误代码
/
#define MI_OK (char)0
#define MI_NOTAGERR (char)(-1)
#define MI_ERR (char)(-2)
串口发送主程序注解
关于使用串口 Serial_SendPacket 这条是确定发送
这条 Serial_TxPacket[2] = 0x11; 要发送的数值赋值
第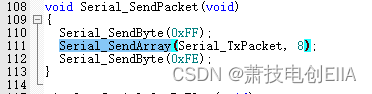
上面这一段只要改变第111中的 Serial_SendArray(Serial_TxPacket, 8); 中的数字就可以改变发送的数值 现在如上图所示的数字就是发送8个
串口发值.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
uint8_t Serial_TxPacket[5]; //FF 01 02 03 04 FE
uint8_t Serial_RxPacket[5];
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
void Serial_SendPacket(void)
{
Serial_SendByte(0xFF);
Serial_SendArray(Serial_TxPacket, 8);
Serial_SendByte(0xFE);
}
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
void USART1_IRQHandler(void)
{
static uint8_t RxState = 0;
static uint8_t pRxPacket = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
uint8_t RxData = USART_ReceiveData(USART1);
if (RxState == 0)
{
if (RxData == 0xFF)
{
RxState = 1;
pRxPacket = 0;
}
}
else if (RxState == 1)
{
Serial_RxPacket[pRxPacket] = RxData;
pRxPacket ++;
if (pRxPacket >= 4)
{
RxState = 2;
}
}
else if (RxState == 2)
{
if (RxData == 0xFE)
{
RxState = 0;
Serial_RxFlag = 1;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
串口发送 .h 文件
#ifndef __SERIAL_H
#define __SERIAL_H
#include <stdio.h>
extern uint8_t Serial_TxPacket[];
extern uint8_t Serial_RxPacket[];
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
void Serial_SendPacket(void);
uint8_t Serial_GetRxFlag(void);
#endif
rfid原理大致
·rfid 读卡可以简单分为以下几步
1 控制 rc522给s50得电
2 s50 发送内部储存的数值(rc5)
3 rc522 校验密码
4 密码正确开始读取内部数值
rfid的读卡前4步与上面相似 只是多了一步吧 数值 写入 s50中
如果用通俗易懂的话来讲就是 先往一堆小孩里喊我的孩子在那里
然后小明听到了 回了一句我在这里 然后我就知道的的孩子在娜里
然后我就可以和他对话
rfid原理细致
①应答器:也称为电子标签,由天线、耦合元件及芯片组成。一般来说,都是用标签作为应答器。每个标签具有唯一的电子编码,附着在物体上标识目标对象。
②阅读器:由天线、耦合元件和芯片组成,是读取(有时还可以写入)标签信息的设备,可设计为手持式RFID读写器或固定式读写器。
在RFID系统中,电子标签附着在待识别物体的表面,电子标签中保存着约定格式的电子数据。阅读器可无接触地读取并识别电子标签中保存的电子数据,达到自动识别物体的目的。阅读器通过天线发送出一定频率的射频信号。当标签进入磁场时,产生感应电流,从而获得能量,发送出自身编码等信息;阅读器读取信息并解码后,送至电脑主机进行相关处理。
rfid即射频识别
一套完整 RFID 系统由 读写器 与 卡片两部份组成 ,其动作原理为由 读写器发射一特定频率之无
限电波能量给 卡片,用以驱动 卡片电路将內部之 ID Code 送出,此时 读写器便接收此 ID Code。
卡片 的特殊在于免用电池、免接触、免刷卡故不怕脏污,且晶片密码为世界唯一无法复制,安全性高、长寿命。
什么是电子标签
电子标签即为 RFID 称射频标签、射频识别 是一种存储数据识别的装置,可以透过无线电波与读写器之间互相传递资讯,用来回应识别资料给读写器。无须人工干预,RFID技术可识别高速运动物体并可同时识别多个电子标签,操作快捷方便
rfid组成
可以简单认为他分为3个部分 读写器 后端应用和中间键
中间键
他是在平台和应用之间的通用服务这些有标准的接口和协议,来面向不同的系统
他是一种面向消息的中间件消息用消息的方式从一个程序传送到另一个程序(传送可以送到多个程序,也可以异步传输)传送者不用等待消息回应中间件不仅可以传送信息还可以解译数据,安全性数据,错误恢复,定位网路资源等。。。。。。
他独立在读写器和后端应用程序
图上所说原件手册
如果要配合labview使用可以参考
具体的就不再赘述了

















 1594
1594

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









