









和二维凸包类似,给定一堆三维空间中的点,包含ta们的最小凸多面体称为这些点的凸包
三维凸包的求法很多:
暴力法
枚举三个点组成的有向三角形(实际上是一个半平面),判断是否所有点都在这个三角形的同侧
复杂度:
O(n4)
O
(
n
4
)
卷包裹法
该算法的思想是先找到一条肯定在凸包上的边
PiPj
P
i
P
j
,
想象一张纸紧贴这条边,向左旋转,直到碰到一个点
Pk
P
k
,
然后以
PkPi
P
k
P
i
和
PkPj
P
k
P
j
为轴继续旋转
相比较来说,卷包裹法是一种比较具象的方法,然而仍有一些需要注意的问题:
首先就是起始边的选择,
一般先把点投影到z=0平面,求出二维凸包,
然后把二维凸包上的一条边作为三维凸包卷包裹的初始边
根据二维凸包的性质,不必真的做投影和凸包
只需要找到一个y坐标最小的点作为起点,到ta极角最小的点作为第二个点
但是,当“y坐标最小”和“极角最小”的选择不止一个的时候,以上算法很容易出错
另外,多点共面也是比较麻烦的问题
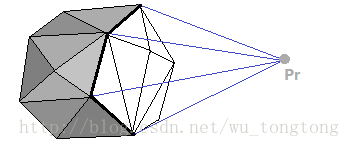
增量法
基本思想是把点依次加到凸包中,
初始时随机选两个点
P1,P2
P
1
,
P
2
,然后找一个不和这两个点共线的点
P3
P
3
,再找一个不和以上三点共面的点
P4
P
4
,组成初始凸包
然后依次考虑其他点
Pr
P
r
如果这个点在当前凸包内,直接忽略
否则,想象该点变成了一个白炽灯,向四面八方散发光线
光线找到我们已经得到的凸包上,会形成亮面和暗面
删除亮面中的所有点(能被光线照射到)
然后把阴影边界上的所有点和
Pr
P
r
连接起来,其中每条边和
Pr
P
r
构成一个三角形
这个算法的简单实现方法是遍历所有面,判断是否可见
然后遍历所有边,判断是否在阴影边界上
然而光这样,我们还是没有办法代码实现
我们还需要考虑特殊情况(比如凸包上多点共面)
简单起见,实践中常常先把输入点进行微小扰动
注意
在记录面的时候
简单起见,假设所有面都是三角形,且三个点由右手定则确定的方向指向多边形的外部
右手定则:
有点类似右手螺旋定则
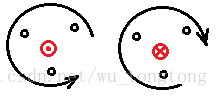
(即从外部看,三个顶点呈逆时针排布)
所以这些面上的三个点的排列顺序并不是任意的
bool vis[N][N];
struct node{
double x,y,z;
node (double xx=0,double yy=0,double zz=0)
{
x=xx;y=yy;z=zz;
}
}
node operator +(node A,node B) {return node(A.x+B.x,A.y+B.y,A.z+B.z);}
node operator -(node A,node B) {return node(A.x-B.x,A.y-B.y,A.z-B.z);}
node operator *(node A,double B) {return node(A.x*B,A.y*B,A.z*B);}
node operator /(node A,double B) {return node(A.x/B,A.y/B,A.z/B);}
double Dot(node A,node B) {
return A.x*B.x+A.y*B.y+A.z*B.z;
}
node Cross(node A,node B) {
return node(A.y*B.z-A.z*B.y,A.z*B.x-A.x*B.z,A.x*B.y-A.y*B.x);
}
struct Face() //面
{
int v[3];
node normal(node &P) const {
return Cross(P[v[1]]-P[v[0]],P[v[2]]-P[v[0]]);
}
int cansee(node &P,int i) const { //混合积
return Dot(P[i]-P[v[0]],normal(P)) >0? 1:0;
}
}
//增量法
//调用前需要对输入点进行微小扰动
vector<Face> TuB3D(node* P,int n){
vector<Face> cur; //面
//扰动后,前三个点不共线
cur.push_back((Face){{0,1,2}}); //加入初始面
cur.push_back((Face){{2,1,0}}); //排列顺序不同,半空间不同
for (int i=3;i<n;i++) //依次加入每个点
{
vector<Face> nxt;
//计算每条边左边的可见性
for (int j=0;j<cur.size();j++)
{
Face& f=cur[j];
int res=f.cansee(P,i);
if (!res) nxt.push_back(f); //阴影中的保留
for (int k=0;k<3;k++) vis[f.v[k]][f.v[(k+1)%3]]=res;
}
for (int j=0;j<cur.size();j++)
for (int k=0;k<3;k++)
{
int a=cur[j].v[k],b=cur[j].v[(k+1)%3];
if (vis[a][b]!=vis[b][a]&&vis[a][b]) //ab是分界线,左边可见
nxt.push_back((Face){{a,b,i}}); //新的面
}
cur=nxt;
}
return cur;
}
//微小扰动
double rand0(){return rand()/(double)RAND_MAX;}
double randeps(){return (rean0()-0.5)*eps;} //-eps/2到eps/2的随机数 代码的可读性还是比较高的















 1390
1390

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









