







 本文档详细介绍了Epson C8系列6轴机器人的操作流程,包括控制软件安装、控制器连接、项目导入与备份、运行机器人管理器、工作空间校准、I/O操作以及通过命令窗口和远程以太网进行控制。此外,还涵盖了原点校准、配件更换等维护步骤。
本文档详细介绍了Epson C8系列6轴机器人的操作流程,包括控制软件安装、控制器连接、项目导入与备份、运行机器人管理器、工作空间校准、I/O操作以及通过命令窗口和远程以太网进行控制。此外,还涵盖了原点校准、配件更换等维护步骤。
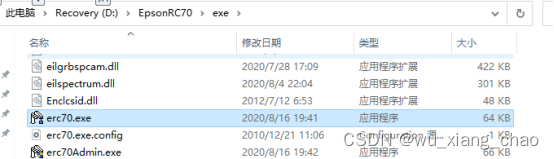
一、安装控制软件
首先,通过安装包安装好Epson控制软件,如下

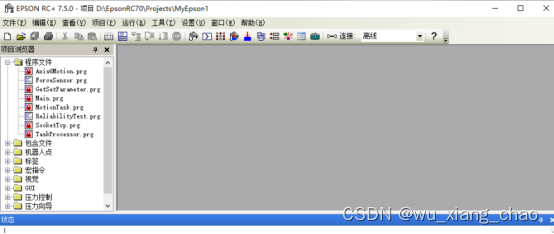
打开后界面如下
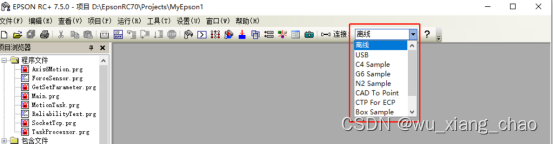
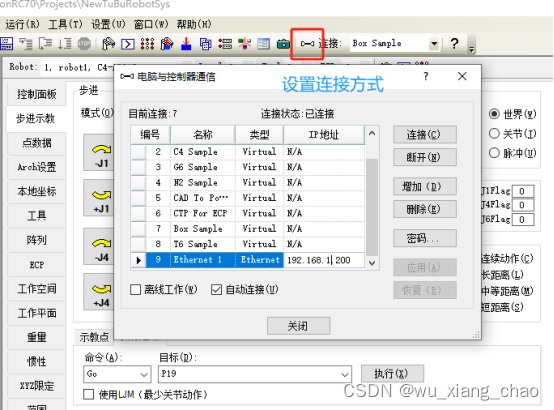
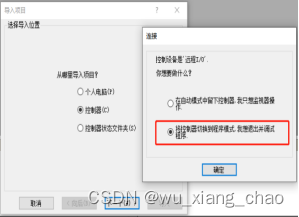
二、连接控制器
打开下拉框,有如图几种连接方式
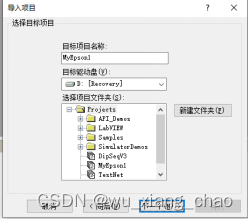
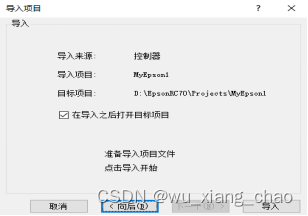
三、导入项目(以从控制器导入项目为例)
菜单栏 项目-》导入-》选择控制器-》点击下一个后选择第二项-》点下一个后-》点击导入后导入程序成功
四、备份控制器
工具=》控制器工具=》备份控制器=》选择存放文件夹
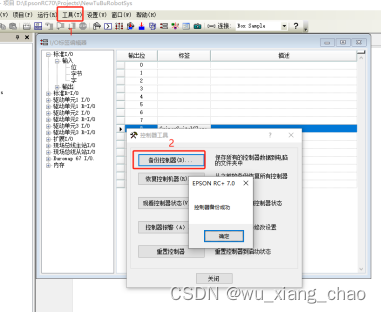
备份一般放在这里
五、运行机器人管理器
点击这个图标运行程序

运行起来后界面如下,默认切换到控制面板
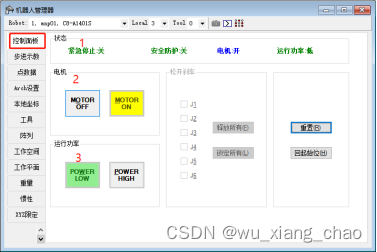
1部分展示机械臂当前状态,2部分启动机械臂或关闭机械臂,3部分是控制机械臂运行功率,功率低会安全些,降低撞机后的损伤程度。
拍急停按钮后,需要重新启动机械臂时需要先把急停按钮旋出然后点击“重置”按钮。
步进示数

1:机械臂控制按钮,可以设置运行速度
2:设置步进距离和点击控制按钮的响应模式
3&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









