







 本文详细介绍了如何通过RC软件连接、设置和操作机械手,包括调试模式切换、给机械手上电、手动移动、示教点位校准、保存信息、执行动作以及使用命令行。还提醒了注意事项,如低功率启动、原点校准和紧急停止方法。
本文详细介绍了如何通过RC软件连接、设置和操作机械手,包括调试模式切换、给机械手上电、手动移动、示教点位校准、保存信息、执行动作以及使用命令行。还提醒了注意事项,如低功率启动、原点校准和紧急停止方法。
第1步:打开RC软件
打开后如图
第2步:连接机械手
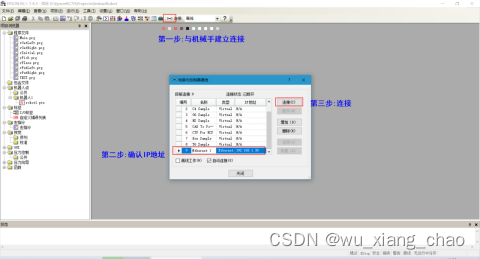
注意:确认网线、USB等连接线路没有问题
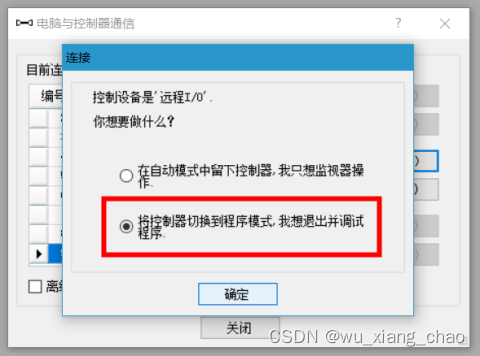
第3步:切换机械手至调试模式
第4步:给机械手上使能
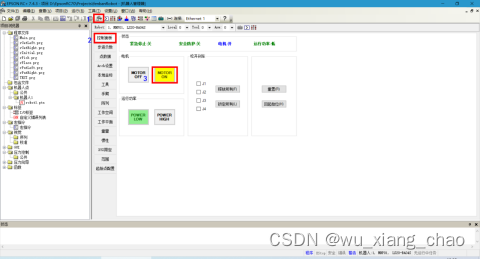
注意:
- 如果机器手此时处于报警状态,需要先重置才能上使能;
- 如非必要,建议使用低功率启动(默认低功率,切换高功率需点击POWER HIGHT按钮)。
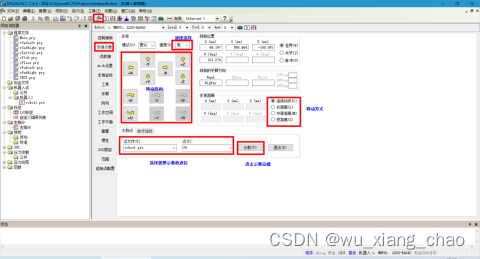
第5步:手动移动机器人,示教点位
5.1 模式介绍
步进模式(默认):默认
X+:沿X轴正方向移动 X-:沿X轴负方向移动
Y+:沿Y轴正方向移动 Y-:沿Y轴负方向移动
Z+:沿Z轴正方向移动 Z-:沿Z轴负方向移动
U+:围绕Z轴正方向逆时针旋转 U-:围绕Z轴正方向顺时针旋转
V+:围绕Y轴正方向逆时针旋转 V-:围绕Y轴正方向顺时针旋转
W+:围绕X轴正方向逆时针旋转 W-:围绕X轴正方向顺时针旋转
步进模式:关节
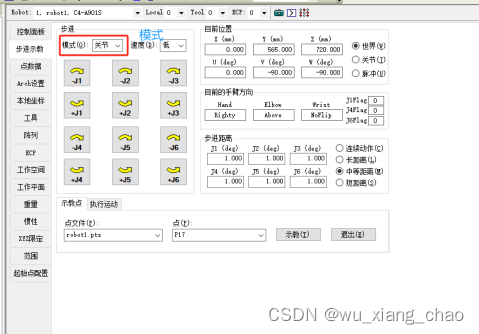
机器手本体上会有明显标识,如点击“-J1”就是1轴往负方向走。
5.2 可能需要先进性原点校准
示教点位过程中有时会发现使用默认的步进模式移动时会很奇怪,如在XYZ方向移动机器手时发现并不是互相垂直的。此时就需要重新校准机器手原点,校准方法可参照Epson C8系列6轴机器手操作指南-CSDN博客
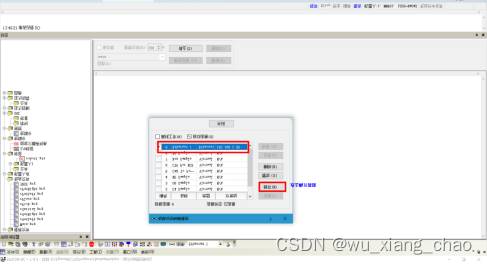
5.3 保存示教点位信息
如果点位位置合适,需要手动点击“示教”按钮保存当前点位信息,
如果点位名称不存在,会弹出如下界面
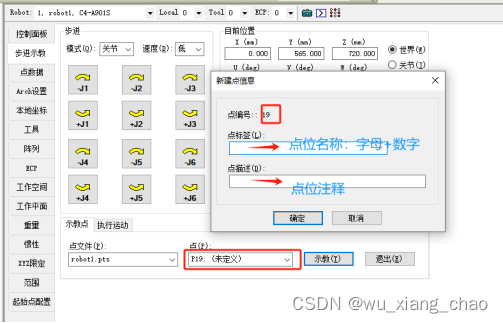
如果点位存在,会提示是否重新示教,选择是就会把原来的点位信息覆盖!
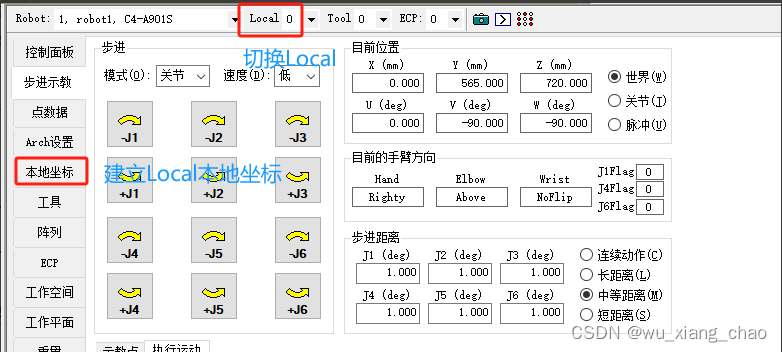
5.4 Local
为了调试方便,可能会建立多个本地坐标
在命令行输入 print here@3 //输出Local3 下的当前位置信息
注意:
- 在空间小的地方建议使用中距离或者短距离进行示教,中断距离是可以手动编辑的,但一般使用默认的;
- 示教时建议使用低速低功率,以免撞击。
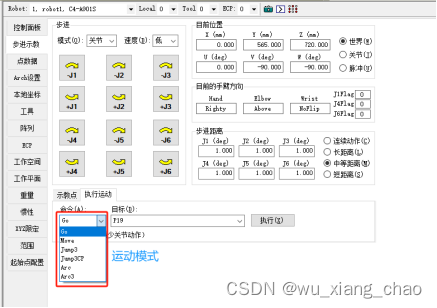
第6步:执行动作
6.1 界面操作
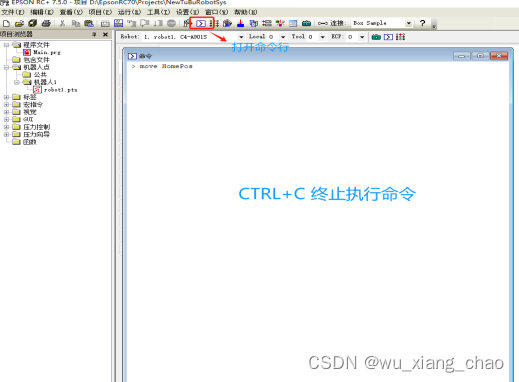
6.2 命令行
一般使用:
Move + 点位
Go + 点位
当然,命令行的作用不止于执行运动,还可以读取运动信息、操作IO等。
注意:如果发现运动命令异常,比如去某个点将要撞击,组合键Ctrl+C紧急停止,如果实在来不及,直接拍急停。
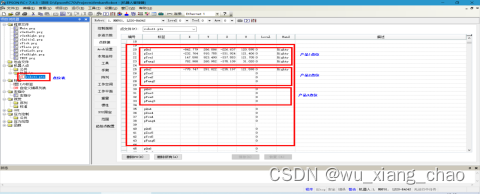
第7步:点数据
从这里可以看到已经示教的所有点位信息。
第8步: 写入程序
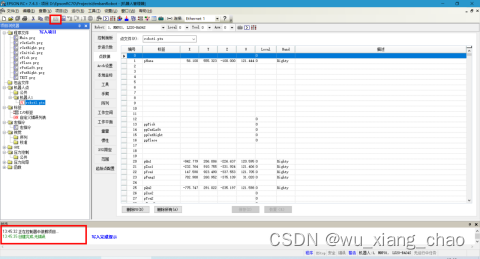
第9步:断开机器人连接 ( 否则将无法关闭软件 )
第10步: 关闭软件即可;

















 1823
1823

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









