






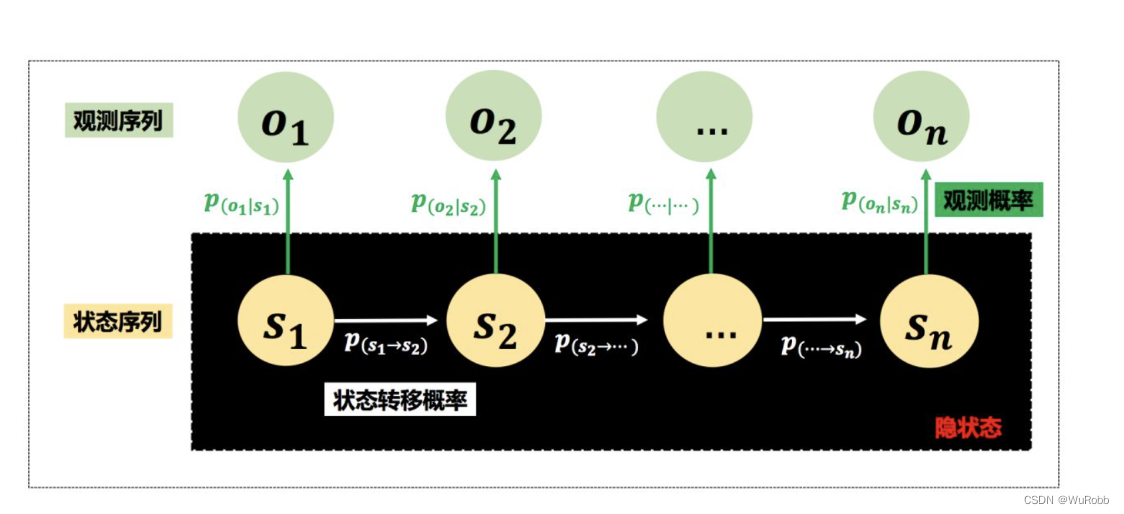
HMM 定义
设Q是所有可能的状态的集合,V是所有可能观测的集合
Q = { q 1 , q 2 , . . . , q n } , V = { v 1 , v 2 , . . . , v m } Q=\{q_1, q_2, ..., q_n\} ,V=\{v_1, v_2, ..., v_m\} Q={q1,q2,...,qn},V={v1,v2,...,vm}
其中n是可能的状态数,m是可能的观测数。
I是长度为t的状态序列,O是对应的观测序列
I = { i 1 , i 2 , . . . , i t } , O = { o 1 , o 2 , . . . , o t } I=\{i_1, i_2, ..., i_t\} ,O=\{o_1, o_2, ..., o_t\} I={i1,i2,...,it},O={o1,o2,...,ot}
A是状态转移矩阵
A = [ a i j ] N ∗ N A = [a_{ij}]_{N*N} A=[aij]N∗N
对于I说,
a
i
j
=
P
(
i
t
+
1
=
q
j
∣
i
t
=
q
i
)
a_{ij} = P(i_{t+1}=q_j|i_t = q_i)
aij=P(it+1=qj∣it=qi)
B是观测矩阵
B = [ b i ( k ) ] N ∗ M B = [b_i(k)]_{N*M} B=[bi(k)]N∗M
b i ( k ) = P ( o t = v k ∣ i t = q i ) b_i(k) = P(o_t=v_k|i_t = q_i) bi(k)=P(ot=vk∣it=qi)
π
\pi
π是初始状态概率向量,则HMM模由
π
\pi
π,A,B决定
λ
=
(
A
,
B
,
π
)
。
\lambda = (A,B,\pi)。
λ=(A,B,π)。
- 齐次马尔科夫链假设。即任意时刻的隐藏状态只依赖于它前一个隐藏状态。
- 观测独立性假设。即任意时刻的观察状态只仅仅依赖于当前时刻的隐藏状态,
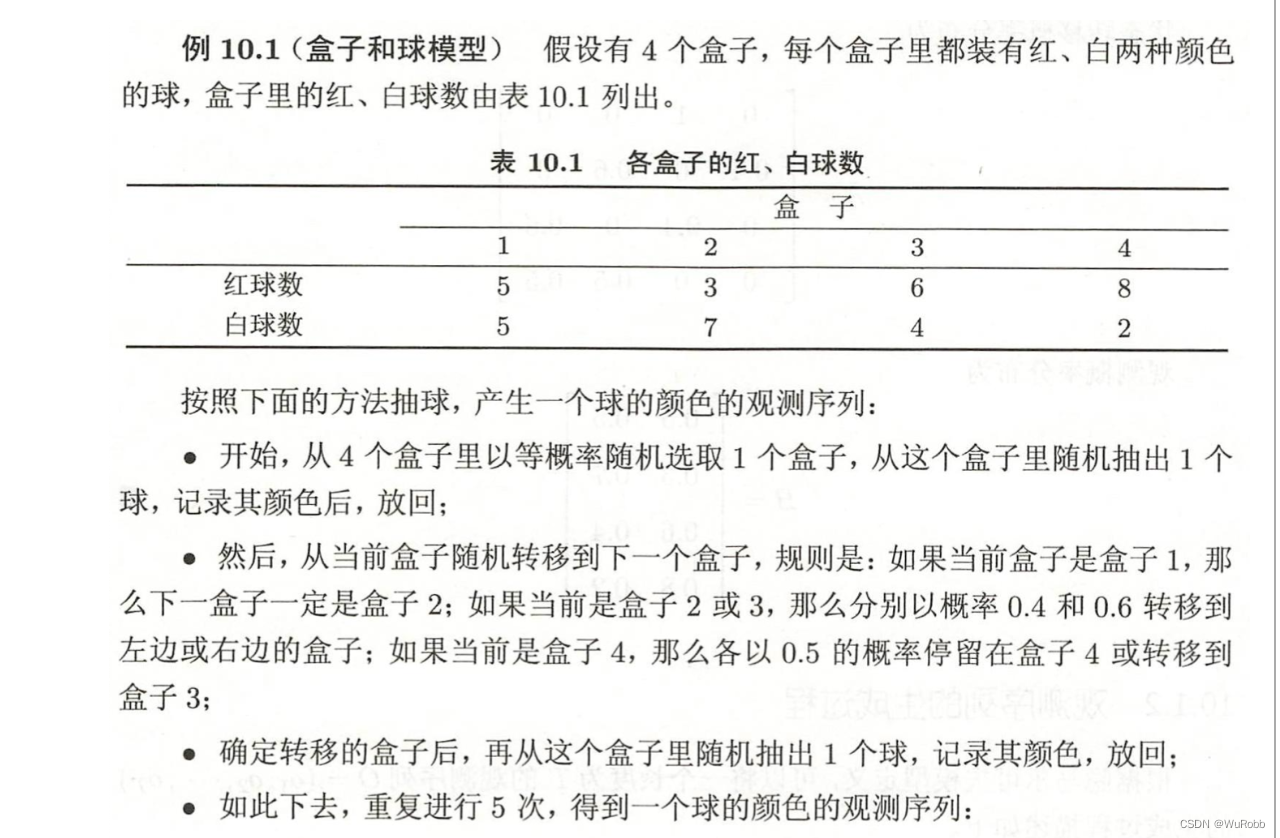
HMM的一个例子
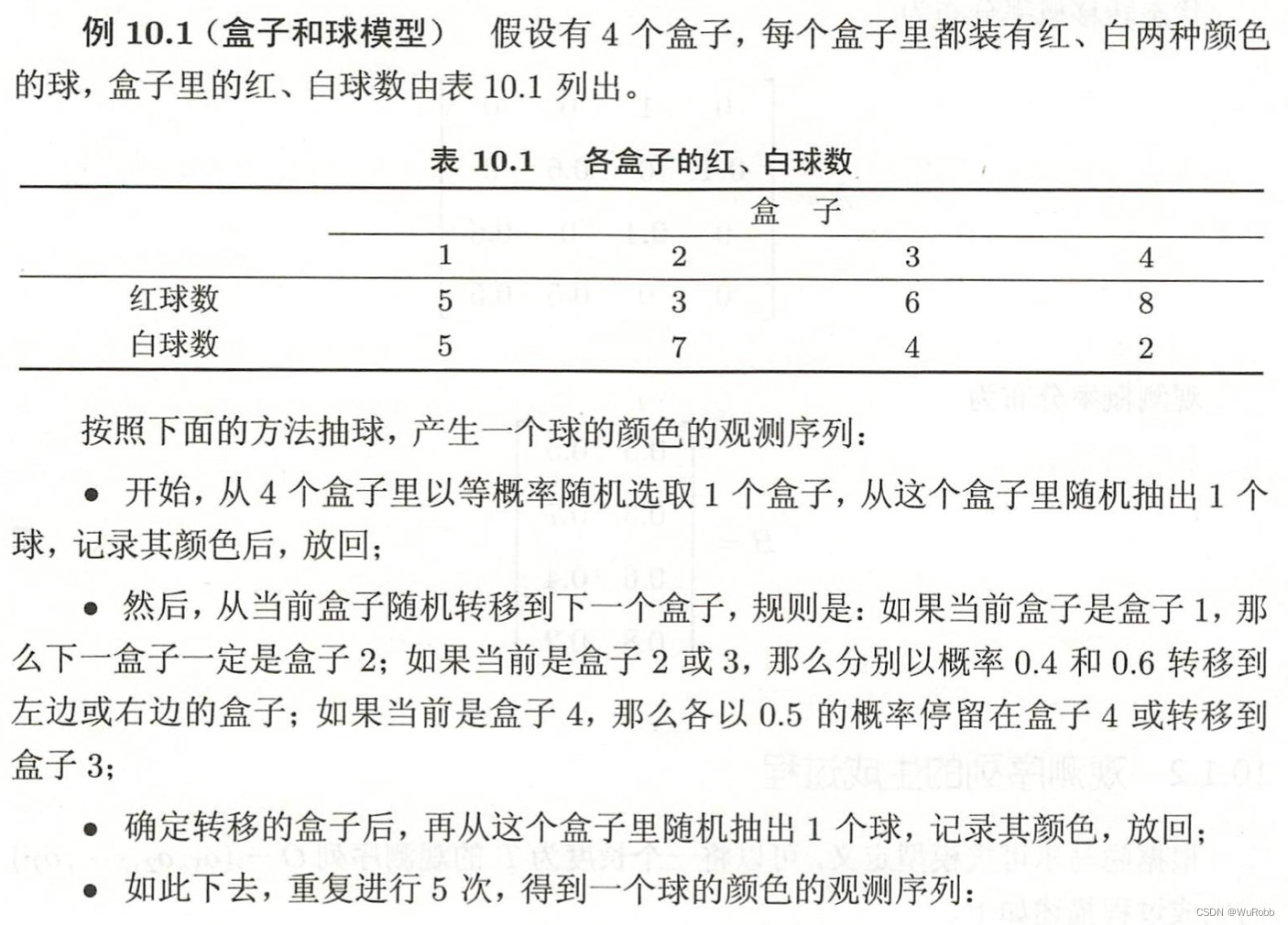
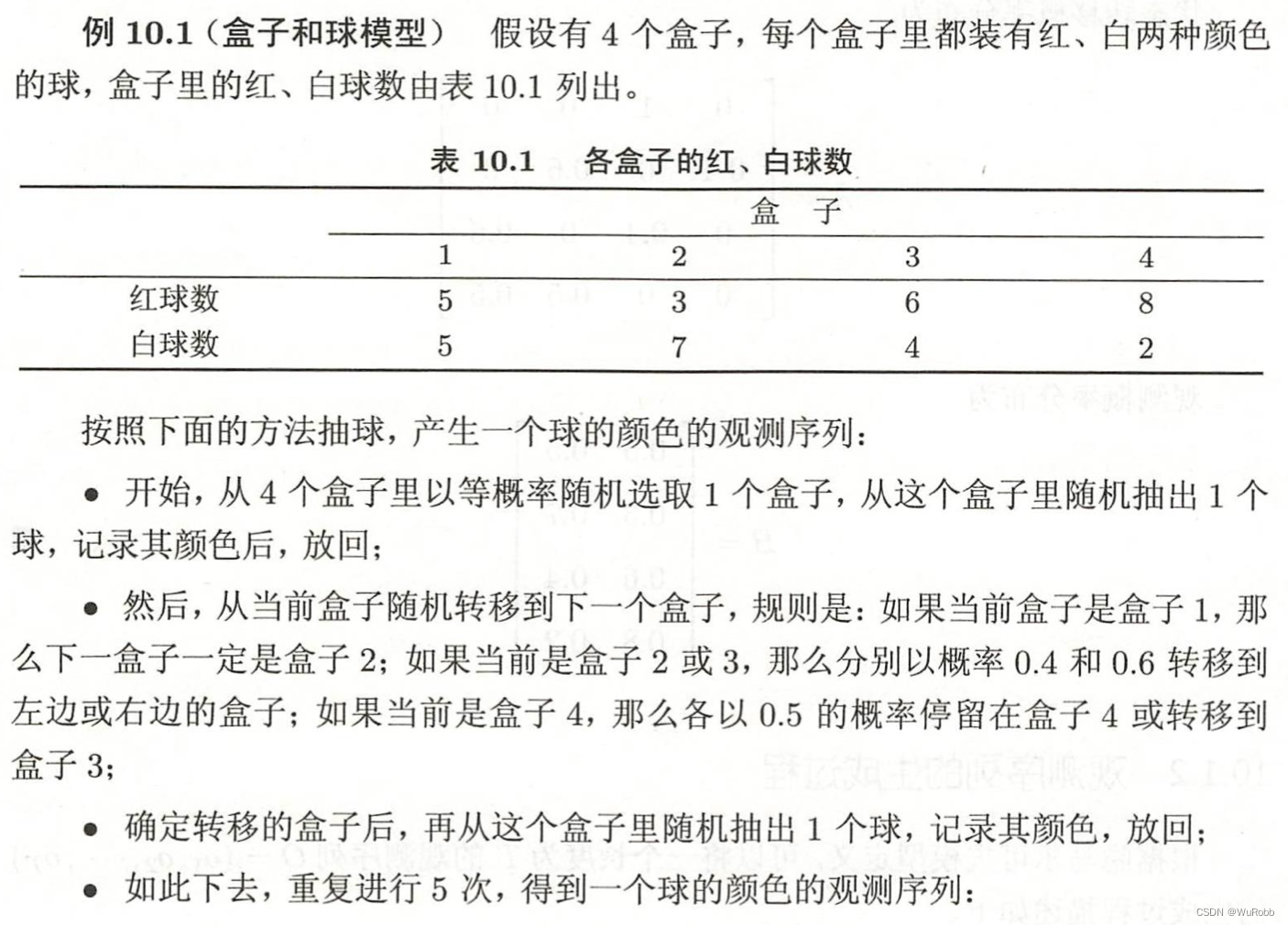
盒子所对应的状态集合为:
Q = { 盒子 1 ,盒子 2 ,盒子 3 ,盒子 4 } Q = \{盒子1, 盒子2, 盒子3, 盒子4\} Q={盒子1,盒子2,盒子3,盒子4}
观测合集为:
V
=
{
红,白
}
V = \{红, 白\}
V={红,白}
初始概率矩阵为:
π
=
{
p
(
盒子
1
)
=
0.25
,
p
(
盒子
2
)
=
0.25
,
p
(
盒子
3
)
=
0.25
,
p
(
盒子
4
)
=
0.25
}
\pi = \{p(盒子1) = 0.25, p(盒子2) = 0.25,p(盒子3) = 0.25,p(盒子4) = 0.25\}
π={p(盒子1)=0.25,p(盒子2)=0.25,p(盒子3)=0.25,p(盒子4)=0.25}
状态转移矩阵为:
A
=
[
盒子
1
盒子
2
盒子
3
盒子
4
盒子
1
0
1
0
0
盒子
2
0.4
0
0.6
0
盒子
3
0
0.4
0
0.6
盒子
4
0
0.4
0.5
0.5
]
A=\left[\begin{array}{lcccc} &盒子1 & 盒子2 & 盒子3 & 盒子4\\ 盒子1 &0 &1 &0 &0\\ 盒子2 & 0.4 & 0 & 0.6 &0\\ 盒子3 & 0& 0.4 & 0 &0.6\\ 盒子4 & 0& 0.4 & 0.5 &0.5 \end{array}\right]
A=
盒子1盒子2盒子3盒子4盒子100.400盒子2100.40.4盒子300.600.5盒子4000.60.5
观测概率分布为:
B
=
[
红球
白球
盒子
1
0.5
0.5
盒子
2
0.3
0.7
盒子
3
0.6
0.4
盒子
4
0.8
0.2
]
B=\left[\begin{array}{ccc} &红球 & 白球 \\ 盒子1 &0.5 &0.5\\ 盒子2 & 0.3 & 0.7 \\ 盒子3 & 0.6 &0.4\\ 盒子4 & 0.8& 0.2 \end{array}\right]
B=
盒子1盒子2盒子3盒子4红球0.50.30.60.8白球0.50.70.40.2
观测序列的生成过程
概率计算算法
- 直接计算法
状态序列 I = { i 1 , i 2 , . . . , i t } I=\{i_1, i_2, ..., i_t\} I={i1,i2,...,it}的概率是:
P ( I ∣ λ ) = π i 1 ⋅ a i 1 i 2 ⋅ ⋅ ⋅ a i t − 1 i t P(I|\lambda) = \pi_{i_1}·a_{i_1i_2}···a_{i_{t-1}i_t} P(I∣λ)=πi1⋅ai1i2⋅⋅⋅ait−1it
对该序列来说,观测序列 O = { o 1 , o 2 , . . . , o t } O=\{o_1, o_2, ..., o_t\} O={o1,o2,...,ot}的概率为:
P ( O ∣ I , λ ) = b i 1 ( o 1 ) ⋅ ⋅ ⋅ b i t ( o t ) P(O|I,\lambda) = b_{i_1}(o_1)···b_{i_t}(o_t) P(O∣I,λ)=bi1(o1)⋅⋅⋅bit(ot)
O和I的联合概率:
P
(
O
,
I
|
λ
)
=
P
(
I
∣
λ
)
P
(
O
∣
I
,
λ
)
P(O,I|\lambda) = P(I|\lambda)P(O|I,\lambda)
P(O,I|λ)=P(I∣λ)P(O∣I,λ)
则
P
(
O
∣
λ
)
=
∑
I
P
(
I
∣
λ
)
P
(
O
∣
I
,
λ
)
=
∑
{
i
1
,
i
2
,
.
.
.
,
i
t
}
π
i
1
⋅
a
i
1
i
2
⋅
⋅
⋅
a
i
t
−
1
i
t
⋅
b
i
1
(
o
1
)
⋅
⋅
⋅
b
i
t
(
o
t
)
\begin{align} P(O|\lambda) = &\sum_IP(I|\lambda)P(O|I,\lambda)\\ =& \sum_{\{i_1, i_2, ..., i_t\}}\pi_{i_1}·a_{i_1i_2}···a_{i_{t-1}i_t}·b_{i_1}(o_1)···b_{i_t}(o_t) \end{align}
P(O∣λ)==I∑P(I∣λ)P(O∣I,λ){i1,i2,...,it}∑πi1⋅ai1i2⋅⋅⋅ait−1it⋅bi1(o1)⋅⋅⋅bit(ot)
该算法时间复杂度太高,采用前向后向算法
前向算法
- 1.初始值
α 1 ( i ) = π i b i ( o 1 ) \alpha_1(i) = \pi_ib_i(o_1) α1(i)=πibi(o1)
- 2.递推
α t + 1 ( i ) = [ ∑ j = 1 N α t ( j ) a j i ] b i ( o t + 1 ) \alpha_{t+1}(i) = [\sum^N_{j=1}\alpha_t(j)a_{ji}]b_i(o_{t+1}) αt+1(i)=[j=1∑Nαt(j)aji]bi(ot+1)
- 3.中止
P ( O ∣ λ ) = ∑ i = 1 N α t ( i ) P(O|\lambda) =\sum^N_{i=1}\alpha_{t}(i) P(O∣λ)=i=1∑Nαt(i)
import numpy as np
O = ['红', '白', '红']
A = np.array([[0.5, 0.2, 0.3],
[0.3, 0.5, 0.2],
[0.2, 0.3, 0.5]])
B = np.array([[0.5, 0.5, ],
[0.4, 0.6, ],
[0.7, 0.3, ]])
pi = np.array([0.2,0.4,0.4])
# 前向算法计算
# 观察序列编码
O = [0, 1, 0, 1, 1]
def hmm_forward(O, A, B, pi):
t = len(O)
# 第一步 初值
a_t = pi*B[:,O[0]]
# 递推计算
for t1 in range(1, t):
a_t = np.sum(a_t*A.T,axis=1)*B[:,O[t1]]
# 中止
return np.sum(a_t)
hmm_forward(O,A,B,pi)
# 输出:0.028486459399999997
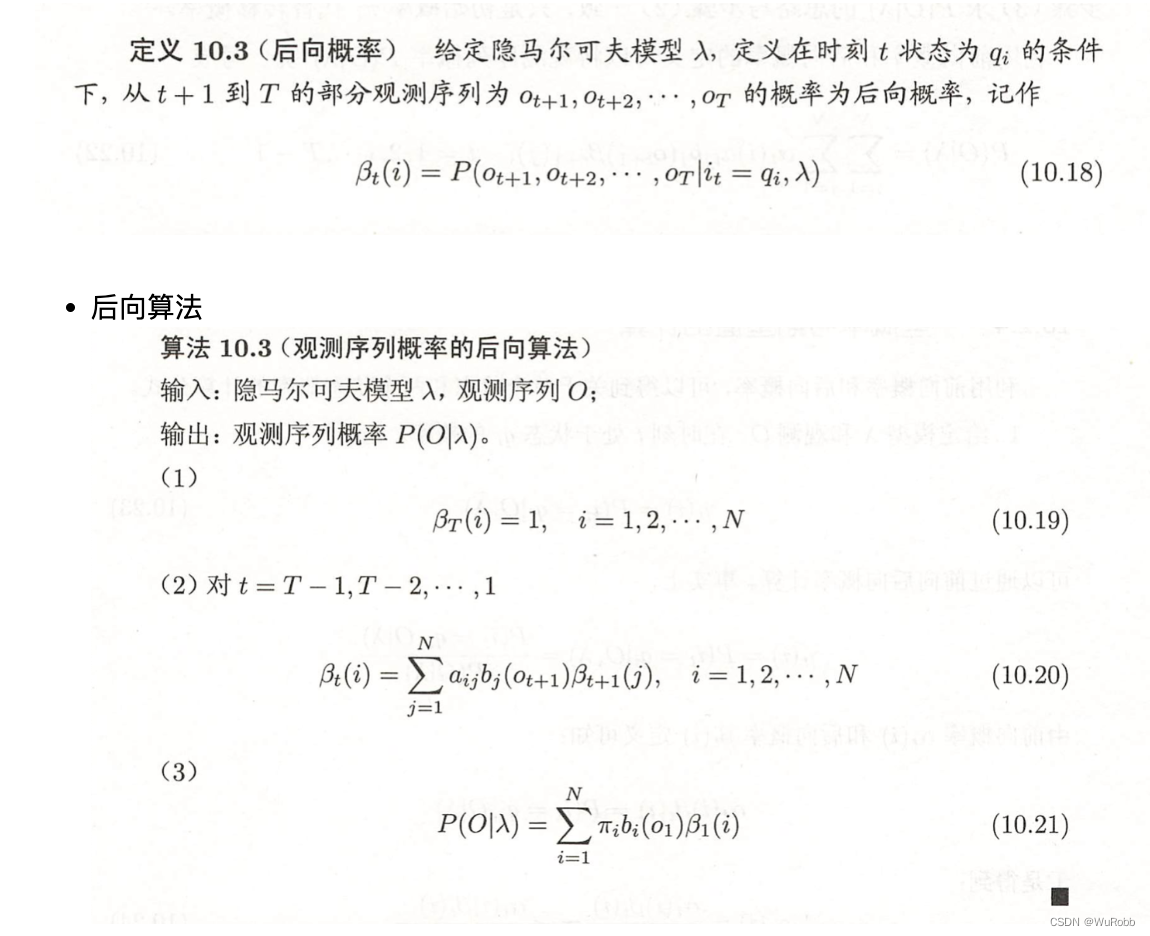
后向算法
def hmm_backward(O, A, B, pi):
t = len(O)
# 第一步 定义T时刻B
b_t = np.array([1 for i in range(A.shape[0])])
# 递推计算
for t1 in range(t-1, 0, -1):
b_t = np.sum(A*B[:, O[t1]]*b_t, axis = 1)
# 中止
return np.sum(pi*b_t*B[:, O[0]])
hmm_backward(O,A,B,pi)
# 输出 0.028486459399999997
预测算法
贪心算法
贪心算法,取每个时间点最大的概率
i t ∗ = a r g m a x 1 ≤ i ≤ N α t ( i ) β t ( i ) i^*_t = arg \underset {1\leq i\leq N}{max} \alpha_t(i)\beta_t(i) it∗=arg1≤i≤Nmaxαt(i)βt(i)
def optimized_path(O, A, B, pi):
t = len(O)
# 第一步 初值
a_t = pi*B[:,O[0]]
b_t = np.array([1 for i in range(A.shape[0])])
b_t_his = [b_t]
a_t_his = [a_t]
# a_t历史记录
for t1 in range(1, t):
a_t = np.sum(a_t*A.T,axis=1)*B[:,O[t1]]
b_t = np.sum(A*B[:, O[-t1]]*b_t, axis = 1)
a_t_his.append(a_t)
b_t_his = [b_t] + b_t_his
return [np.argmax(b_t_his[i]*a_t_his[i]) for i in range(t)]
optimized_path(O, A, B, pi)
# 输出:[2, 1, 2, 1, 1]
ref:
[1]李航. 统计学习方法[M]. 清华大学出版社, 2012.















 399
399











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









