






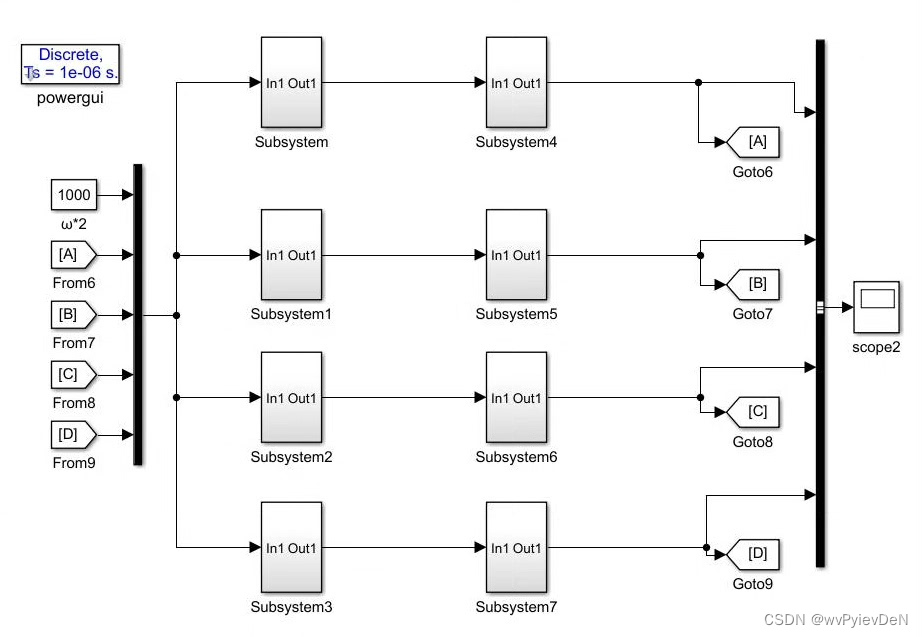
simulink上搭建的四永磁同步电机偏差耦合转速同步控制仿真模型。
标题:基于Simulink的四永磁同步电机偏差耦合转速同步控制仿真模型设计与优化
摘要:
本文基于Simulink工具,设计了一个四永磁同步电机偏差耦合转速同步控制仿真模型。首先,介绍了四永磁同步电机的基本原理和结构特点,分析了传统控制方法在实际应用中的局限性。然后,详细说明了Simulink的搭建过程,包括电机模型的建立、控制器的设计以及仿真环境的配置。在模型设计的基础上,通过系统标识和参数优化,进一步提升了控制性能。最后,通过仿真结果的分析和讨论,验证了该模型的有效性和优越性,为实际应用中的电机控制提供了参考。
关键词:Simulink,四永磁同步电机,偏差耦合,转速同步控制,仿真模型
引言:
四永磁同步电机作为一种高效能、高响应性和高功率密度的电机,广泛应用于工业自动化领域。在实际应用中,如何实现精准的转速同步控制是一个重要的研究方向。传统的控制方法往往存在着控制精度低、系统响应慢等问题,因此需要通过模型设计和优化来提升系统的性能。
1. 四永磁同步电机的基本原理与结构特点
1.1 四永磁同步电机的工作原理
1.2 四永磁同步电机的结构特点
2. 传统控制方法的局限性分析
2.1 PI控制器的应用与局限性
2.2 传统控制方法的问题与挑战
3. 基于Simulink的仿真模型设计
3.1 Simulink概述与环境配置
3.2 四永磁同步电机模型的建立
3.3 转速同步控制器的设计
4. 系统标识与参数优化
4.1 线性系统标识方法的选择与应用
4.2 参数优化算法的选择与应用
5. 仿真结果与性能分析
5.1 系统稳态性能分析
5.2 系统动态性能分析
6. 结论与展望
6.1 结论总结
6.2 对未来工作的展望
结语:
本文基于Simulink工具,设计了一个基于四永磁同步电机的偏差耦合转速同步控制仿真模型,并通过系统标识和参数优化来优化系统的性能。通过仿真结果的分析和讨论,验证了该模型的有效性和优越性。未来,我们可以进一步研究控制方法的改进和优化,以实现更高精度的转速同步控制。
注意:
本文所介绍的模型为仿真模型,非实际产品。购买前请充分考虑,售出后不提供退货和换货服务。本文旨在提供技术分析与探讨,并不含有广告性质。
相关代码,程序地址:http://imgcs.cn/lanzoun/757884342927.html















 1078
1078











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









