






卡尔曼滤波(Kalman Filter)是一种高效的递归滤波器,用于线性动态系统的估计和控制。它在1960年由Rudolf E. Kalman提出。卡尔曼滤波通过结合一系列的测量观测值(包括不确定性的),并考虑外部因素(如系统噪声),来估计动态系统的内部状态。
### 基本原理
卡尔曼滤波主要用于两个方面:预测和更新。其核心是维护两个主要的变量:状态估计和不确定性估计。
1. **状态估计**:预测系统下一时刻的状态。
2. **不确定性估计**:估计状态估计的准确性。
### 过程步骤
卡尔曼滤波的操作可以分为以下几个步骤:
1. **初始化**:设定初始状态和初始不确定性。
2. **预测**:
- **状态预测**:使用状态转移方程预测下一时刻的状态。
- **不确定性预测**:计算预测状态的不确定性。
3. **更新(校正)**:
- **测量更新**:使用新的测量数据更新状态估计。
- **不确定性更新**:更新估计的不确定性。
4. **反馈**:将更新后的状态作为下一轮预测的初始状态。
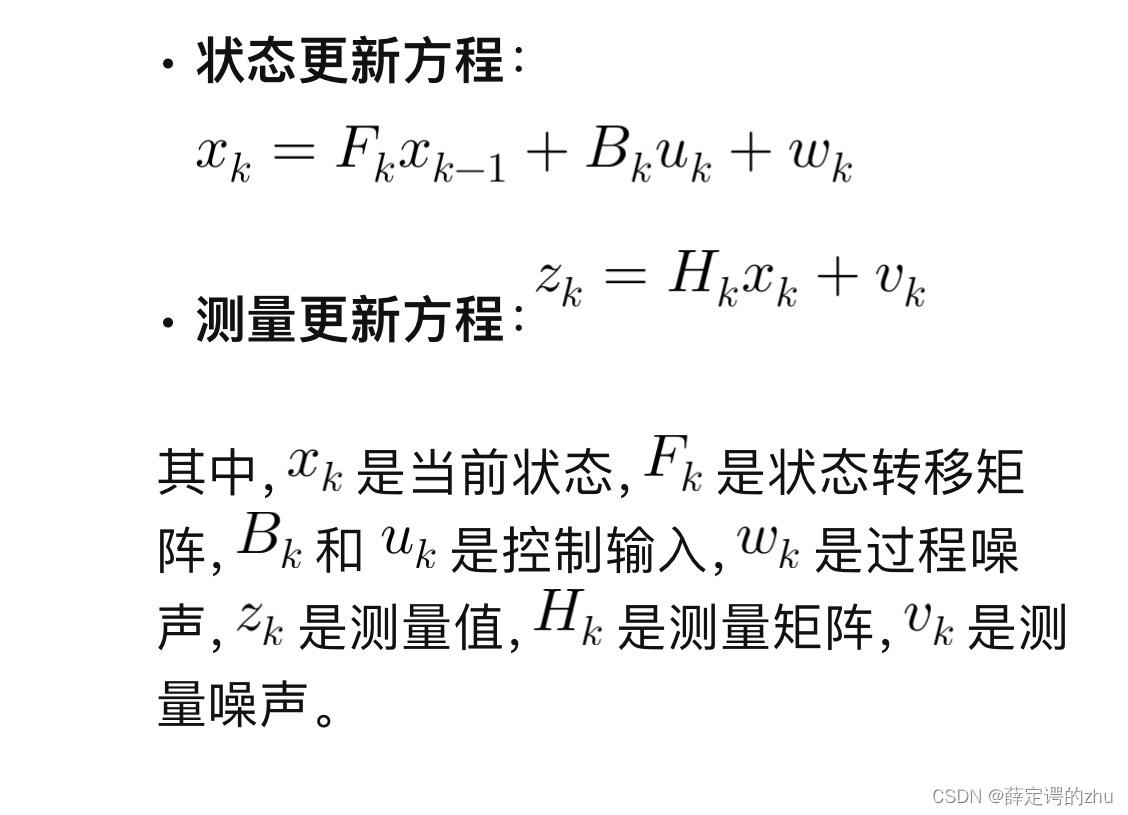
### 数学表达
在数学上,卡尔曼滤波涉及到以下几个关键方程:
### 应用
卡尔曼滤波在许多领域都有广泛应用,如:
- **导航系统**:如飞机、船舶和汽车的GPS导航。
- **机器人运动控制**:预测和控制机器人的位置和速度。
- **经济学**:在宏观经济建模和预测中分析时间序列数据。
- **信号处理**:如雷达信号处理和视频信号处理。
### 优点和局限性
**优点**:
- 高效且适用于实时系统。
- 可以处理噪声和不确定性。
**局限性**:
- 假设系统是线性的。
- 需要知道系统噪声和测量噪声的统计特性。
- 对初始状态估计敏感。
总的来说,卡尔曼滤波是一种强大且灵活的工具,适用于众多需要动态系统状态估计的场景。对于非线性系统,其变体(如扩展卡尔曼滤波和无迹卡尔曼滤波)被开发出来以处理更复杂的情形。















 58
58











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









