






一、超声波测距
1、产品特点:
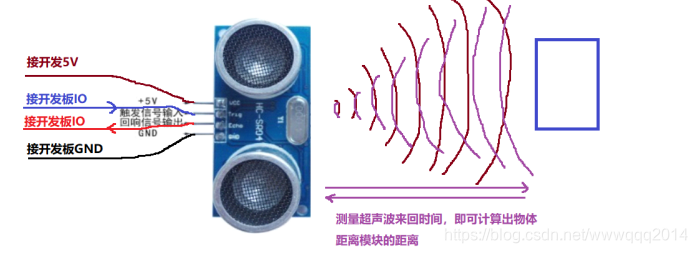
HC-SR04 超声波测距模块可提供 2cm-400cm 的非接触式距离感测功能, 测距精度可达高到 3mm;模块包括超声波发射器、接收器与控制电路。
本工作原理:
(1)采用 IO 口 TRIG 触发测距,给最少 10us 的高电平信号。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回。
(3)有信号返回, 通过 IO 口 ECHO 输出一个高电平, 高电平持续的时间就是超声波从发射到返回的时间。 测试距离=(高电平时间*声速(340M/S))/2 。
模块分析
时序图分析
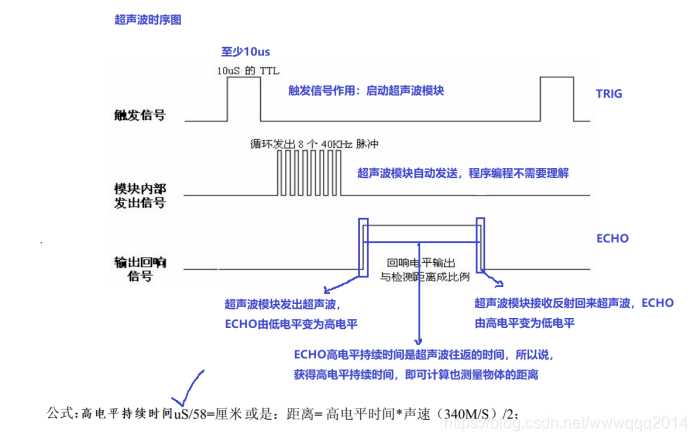
其实使用高电平持续时间us/58 = ?厘米的公式更加容易计算
代码开发流程:
(1)选择两个引脚分别为输入(PA2)及输出(PA3),记得添加sys.h头文件
#define TRIG PAout(2)
#define ECHO PAin(3)
PA2 ------ TRIG
PA3 ------ ECHO
(2)定义一个定时器3,每1us计一个数,周期为50000,不使用NVIC,且不使能定时器
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
//1、能定时器时钟。
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_TimeBaseInitStruct.TIM_Period = 50000-1; //重载寄存器。计数1000个数,在1MHZ,计1000个数,用时1ms
TIM_TimeBaseInitStruct.TIM_Prescaler = 83; //84分频 84MHZ/84 = 1MHZ
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInitStruct.TIM_ClockDivision= TIM_CKD_DIV1; //分频因子
//2、初始化定时器,配置ARR,PSC。
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
//5、不使能定时器。
TIM_Cmd(TIM3, DISABLE);
(3)根据下面代码框架,完成超声波距离
//触发信号
TRIG = 0;
delay_us(5);
TRIG = 1;
delay_us(20);
TRIG = 0;
//设置定时器CNT为0
//等待高电平到来
While( … );
//开启定时器
//等待低电平到来
While( … );
//获取定时器的CNT值
//关闭定时器
//通过定时器的CNT值计算出距离
sys.h文件
#ifndef __SYS_H_
#define __SYS_H_
#include "stm32f4xx.h"
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414 20 = 0x14
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010 16 = 0x10
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入
#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入
#endif
超声波头文件 sr04.h,程序中的delay.h就不一一给出了
#ifndef __SR04_H
#define __SR04_H
#include "stm32f4xx.h"
#include "sys.h"
#include "delay.h"
/*******************************
引脚说明:
PA2 -- TRIG(输出)
PA3 -- ECHO(输入)
*******************************/
#define TRIG PAout(2)
#define ECHO PAin(3)
void Sr04_Init(void);
u16 Get_Sr04_Value(void);
#endif
超声波.c文件 sr04.c
#include "sr04.h"
/*******************************
引脚说明:
PA2 -- TRIG(输出)
PA3 -- ECHO(输入)
*******************************/
void Sr04_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
//使能GPIOA组时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
//1、能定时器时钟。
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2; //引脚2
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //输出类型
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; //输出推挽
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //速度
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_3; //引脚3
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN; //输入
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; //浮空
GPIO_Init(GPIOA, &GPIO_InitStruct);
TIM_TimeBaseInitStruct.TIM_Period = 50000-1; //重载寄存器。
TIM_TimeBaseInitStruct.TIM_Prescaler = 83; //84分频 84MHZ/84 = 1MHZ 计一个数,用1us
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInitStruct.TIM_ClockDivision= TIM_CKD_DIV1; //分频因子
//2、初始化定时器,配置ARR,PSC。
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
//5、不使能定时器。
TIM_Cmd(TIM3, DISABLE);
}
u16 Get_Sr04_Value(void)
{
u16 t = 0;
u16 distance;
u16 count = 0;
//触发信号
TRIG = 0;
delay_us(5);
TRIG = 1;
delay_us(20);
TRIG = 0;
//设置CNT为0
TIM3->CNT = 0;
//等待高电平到来,并做超时处理
while( PAin(3) == 0)
{
t++;
delay_us(10);
//如果等待5ms未能等待高电平,则返回
if(t >= 500)
return 0;
}
//开启定时器
TIM_Cmd(TIM3, ENABLE);
t = 0;
//等待低电平到来,并做超时处理
while( PAin(3) == 1 )
{
t++;
delay_us(20);
//如果等待24ms(24ms测量的距离为413cm了,手册中说最远为40cmm,故取此值)未能等待低电平,则返回
if(t >= 1200)
return 0;
}
//获取定时器的CNT值
//count = TIM_GetCounter(TIM3);
count = TIM3->CNT;
//关闭定时器
TIM_Cmd(TIM3, DISABLE);
//通过定时器的CNT值计算出距离
distance = count/58;
return distance;
}
在程序处理过程中,一般要记得做超时处理


















 1048
1048

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











