






基于A* 算法的无人机三维路径规划算法,可以动态避障,自己可以规定设计障碍物位置,MATLAB编程实现
YID:419772951761070
可惜没如果
基于A算法的无人机三维路径规划算法是一项具有重要应用前景的技术。无人机近年来在各个领域得到了广泛应用,其高效的飞行能力使得无人机可以完成一些传统人力难以完成的任务,例如航拍、物流运输、灾后救援等。然而,无人机在飞行过程中可能会遇到不同的障碍物,如建筑物、山体、树木等,这些障碍物对于无人机的飞行路径规划提出了挑战。因此,设计一种基于A算法的无人机三维路径规划算法,能够动态避障,并允许用户自定义设计障碍物位置,具有重要的应用价值。
首先,我们需要了解A算法的基本原理。A算法是一种启发式搜索算法,通过启发函数评估当前节点到目标节点的成本,并选取最佳路径。在无人机路径规划中,我们可以将地图划分为一系列离散的网格,每个网格表示一个可能的无人机位置。然后,根据A*算法的规则,从起点开始搜索路径,每次选择具有最小估计成本的网格前进,直到达到目标位置。通过不断更新起点和目标位置,可以实现动态的路径规划,并在遇到障碍物时进行避障。
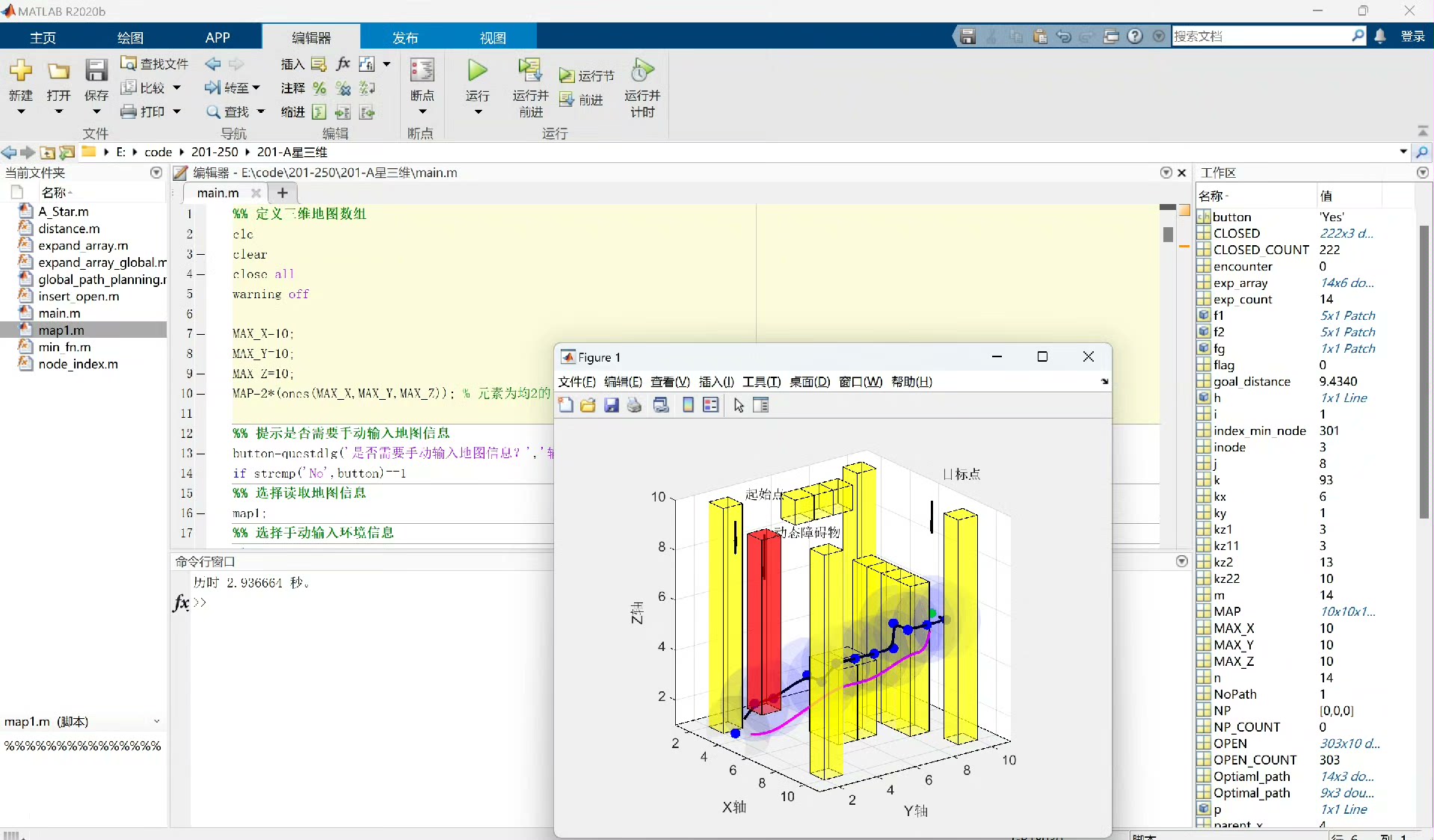
其次,我们需要考虑无人机路径规划中的三维问题。与二维路径规划不同,无人机在三维空间中存在更多的运动自由度,因此需要考虑更多的因素,如高度、飞行速度等。为了实现三维路径规划,我们可以将地图扩展为一个三维网格,并维护每个网格的高度信息。通过在A*算法中引入高度因素,我们可以确定无人机的最佳飞行路径,同时避免与地面障碍物的碰撞。
另外,无人机的路径规划需要考虑动态避障。在飞行过程中,无人机可能会遇到动态障碍物,如其他飞行器、鸟群等。为了实现动态避障,我们可以在A*算法中引入实时传感器数据,例如雷达、摄像头等,以检测和跟踪动态障碍物的位置和运动。通过不断更新障碍物信息,并将其纳入路径规划的考虑范围,我们可以使无人机能够动态避开这些障碍物,保证飞行的安全性和稳定性。
最后,我们使用MATLAB进行编程实现。MATLAB作为一种高效的数学建模和仿真工具,在路径规划领域有着广泛的应用。通过利用MATLAB提供的图形界面和编程功能,我们可以方便地实现基于A*算法的无人机三维路径规划算法。同时,MATLAB还提供了丰富的绘图和
以上相关代码,程序地址:http://fansik.cn/772951761070.html
















 703
703

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









