






气象数据高精度融合技术研究
摘要
随着气象雷达技术的发展,雷达观测在天气预报和气象监测中扮演着重要角色。为了提高降水场估计的精度,通过融合多部雷达的观测数据,特别是考虑到雷达观测数据和雨量计数据的不同误差特性,采用变分同化技术进行数据融合。本文件提出了三个主要问题,并通过建立相应的变分同化模型进行求解。
在问题一中,通过变分同化方法,将左、右两部雷达的观测数据进行融合,我们成功生成了一个更为精确的降水场。该模型结合了雷达的广域覆盖和多源观测数据的互补性,显著提高了降水观测的精度。结果表明,同化后的降水场在空间分布上更加平滑一致,减少了原始数据中的噪声和不一致性。
在问题二中,考虑融合部分重叠区域(重叠25%)的双雷达观测数据,以提高降水场的估计精度。模型不仅考虑了雷达观测误差,还加入了对降水场梯度估计的误差处理,通过梯度下降法进行优化。结果显示,同化后的降水场在重叠区域和非重叠区域均具有较好的平滑性和一致性,显著修正了原始雷达数据中的局部误差,提高了整体降水估计的精度。
问题三的重点在于将双雷达观测数据与雨量计数据结合,生成更为准确的降水场。模型通过修正目标函数,结合观测数据的误差和梯度正则化项,优化利用梯度下降的步长,对问题进行优化。同化后的降水场在空间分布上更为合理和平滑,有效修正了雷达数据中的局部误差,并利用雨量计数据进一步提高了降水估计的准确性。
目录
摘要 1
一、 问题重述 3
1.1 问题背景 3
1.2 要解决的问题 3
二、 问题分析 5
2.1 任务一的分析 5
2.2 任务二的分析 6
2.3 任务三的分析 7
三、 问题假设 8
四、 模型原理 9
4.1 规划模型 9
4.2 梯度下降 10
4.3 正则化 11
五、 模型建立与求解 13
5.1 问题一建模与求解 13
5.2 问题二建模与求解 18
5.3问题三建模与求解 25
六、 模型评价与推广 34
6.1 模型的评价 34
6.1.1 模型缺点 34
6.1.2模型缺点 34
6.2 模型推广 34
七、 参考文献 35
附录【自行删减】 36
5.1 问题一建模与求解
在气象领域,降水观测的主要手段包括雷达和雨量计。雷达具有广域、连续和快速的观测特点,但精度相对较低。为了提高降水观测的精度,可以利用雨量计的精确点测量和雷达的空间覆盖能力,通过数据同化方法结合两者的优点。
本题要求我们建立一个变分同化模型,将两部不同精度的雷达观测数据进行融合,生成更为精确的降水场。
数据描述如下:
:左雷达的观测数据。
:右雷达的观测数据。
其中:
X :同化后的降水场。
:左雷达观测数据的误差标准差。
:右雷达观测数据的误差标准差。
:正则化参数,控制正则化项的影响。
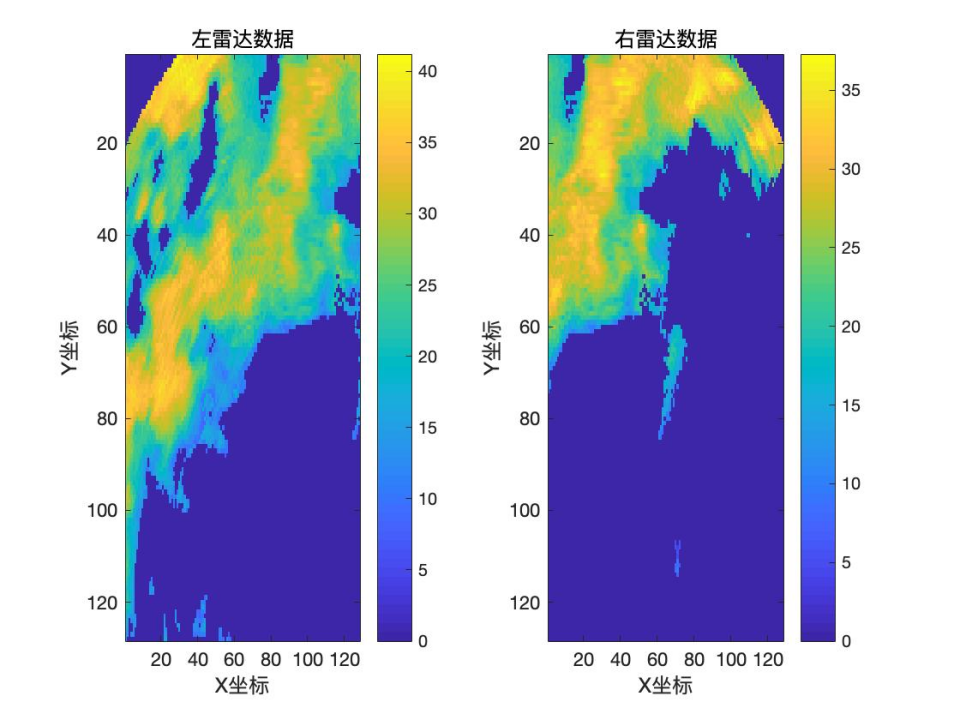
左右雷达数据对比图中左图显示了左雷达的原始降水数据,右图显示了右雷达的原始降水数据。左右雷达数据在某些区域存在明显差异,特别是在降水强度和分布上。这种差异可能源于雷达观测误差以及两部雷达的探测精度不同。通过对比可以看出,同化方法需要在这些差异中找到最佳的降水估计,这也是同化技术的核心挑战之一。
为了将左、右雷达的数据进行融合,同时保持降水场的平滑性,构建以下目标函数:

其中, R(X) 为正则化项,用于确保降水场的平滑性,通常定义为梯度的平方和:
目标函数 J(X) 对 X 的梯度为:
其中, 为正则化项的梯度。
使用梯度下降法进行优化,迭代更新 X :
其中,为学习率。
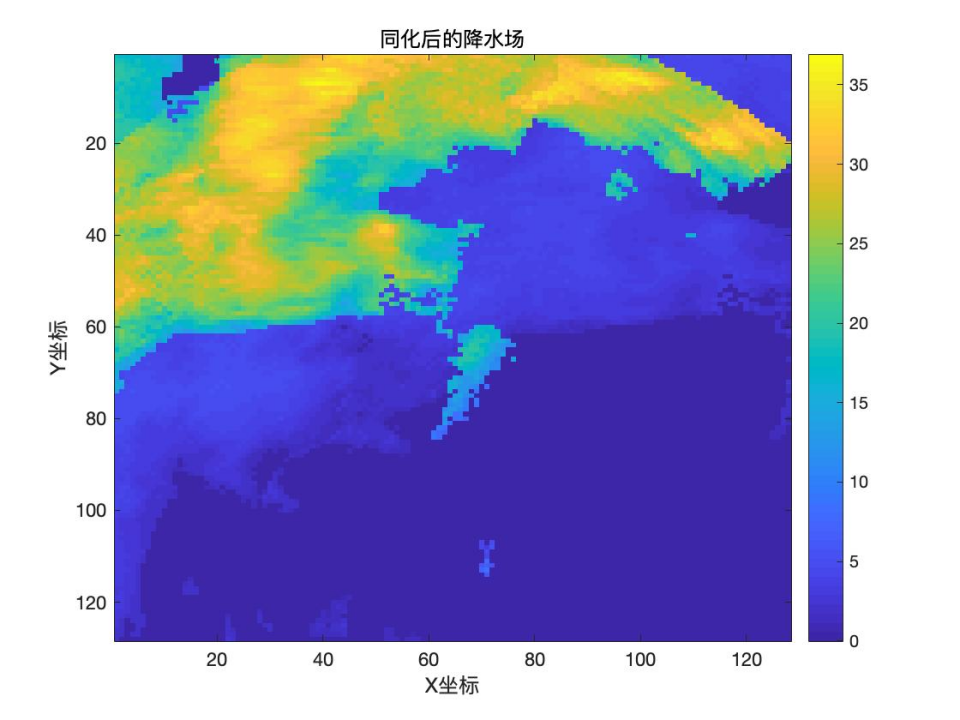
通过上述变分同化模型,将两部雷达的观测数据进行融合,生成了同化后的降水场,如图所示。同化后的降水场较好地结合了左、右雷达的观测数据,表现出更高的平滑性和一致性。
为评估同化后降水场的精度,我们计算了其与左、右雷达观测数据的平均绝对误差。结果表明,同化后的降水场在整体上较原始雷达数据具有更高的精度。
同化后的降水场图像展示了降水的空间分布情况,其中颜色越浅表示降水量越大。从图中可以看出,同化后的降水场在各个区域的过渡更加平滑,减少了原始雷达数据中的噪声和不一致性。通过同化,降水场的空间分布更为合理,降水梯度过渡更加自然,这有助于更准确地反映实际的降水情况。
我们还进行了其他可视化进行说明,右雷达数据与同化后降水场对比图中左图显示了右雷达的原始降水数据,右图显示了同化后的降水场。两图使用相同的颜色映射表示降水量,便于比较。
右雷达数据中,降水区域的分布较为密集且存在局部突变。同化后的降水场在整体上与右雷达数据相符,但在空间上更加平滑,并且修正了一些局部的突变。
这种对比展示了同化方法对右雷达数据的优化效果,提高了降水估计的连续性和一致性。
左雷达数据与同化后降水场对比,左图显示了左雷达的原始降水数据,右图显示了同化后的降水场。左雷达数据中,降水区域同样存在密集分布和局部突变。
同化后的降水场在空间上更加平滑,修正了局部突变。
左右雷达同化后误差分布,左图显示了左雷达数据与同化后降水场的误差分布,右图显示了右雷达数据与同化后降水场的误差分布。颜色表示误差大小,颜色越浅表示误差越大。
从误差分布图可以看出,误差在空间上的分布相对均匀,没有明显的集中区域,这表明同化方法在全局上有效减少了误差。左雷达和右雷达的误差分布图表明,尽管同化后的降水场与原始雷达数据存在误差,但这些误差在合理范围内,且空间分布均匀。通过同化方法,显著降低了原始雷达数据中的局部误差,提高了降水场的整体精度。
通过变分同化方法,将左、右雷达的观测数据进行融合,有效提升了降水场的精度。该方法充分利用了雷达的空间覆盖优势和多源观测数据的互补性,为气象领域的降水监测和预报提供了重要参考。
5.2 问题二建模与求解
如果两部具有不同探测精度的雷达只有部分重叠,通过变分同化也可以提升估测降水场的精度。本题假设两部雷达的观测区域均为正方形,并有25%的区域重叠。
我们首先分析问题一和问题二的区别和联系.两个问题的目标均是通过变分同化方法融合双雷达观测数据,生成更为准确的降水场.都使用变分同化方法,构建目标函数并利用梯度下降法进行数值优化.
区别在于:1、观测区域不同.问题一处理的是完全重叠的雷达观测数据,而问题二处理的是部分重叠(25%)的雷达观测数据。
2、误差处理方法不同.问题一主要考虑雷达观测误差,而问题二不仅考虑观测误差,还考虑了降水场梯度估计的误差,特别关注重叠区域和非重叠区域的分别处理。
3、模型复杂度不同.问题一采用相对简单的变分同化模型,问题二的模型更复杂,需要分别处理重叠和非重叠区域的数据融合问题。
这些差异导致了两种方法在处理数据时的不同,但都通过变分同化有效地提升了降水场的估计精度.
针对问题二我们先进行符号和参数假设:
X :同化后的降水场。
:左雷达的观测数据,误差为50%。
:右雷达的观测数据,误差为20%。
:左雷达观测数据的误差标准差。
:右雷达观测数据的误差标准差。
:左雷达对降水场梯度估计的误差标准差。
:右雷达对降水场梯度估计的误差标准差。
:正则化参数,控制正则化项的影响。
观测区域如下:
:左雷达的观测区域。
:右雷达的观测区域。
:左雷达和右雷达的重叠区域。
建立以下形式的目标函数,通过变分法求解:
其中, R(X) 为正则化项,用于确保降水场的平滑性,通常定义为梯度的平方和:
目标函数 J(X) 对 X 的梯度为:
其中, 为正则化项的梯度。
使用梯度下降法进行优化,迭代更新 X :
其中,为学习率。
我们详细的步骤包括
1.数据加载和提取:将数据从MAT文件中正确加载并转换为双精度浮点型。
2. 误差参数设置:设置左雷达和右雷达的误差标准差、正则化参数、迭代次数和学习率。
3. 初始化同化后的降水场:初始化同化后的降水场为全零矩阵。
4. 定义观测区域:、为左、右雷达的观测区域。为左雷达和右雷达的重叠区域。
5. 定义权重系数:设置权重系数 、 和 。
6. 迭代优化:使用梯度下降法进行优化,通过计算梯度逐步更新降水场 X。
7. 正则化项的梯度计算:计算正则化项的梯度,确保降水场的平滑性。
8. 梯度计算:计算目标函数对降水场 X 的梯度,结合雷达观测误差和正则化项。
通过这些步骤,可以有效地建立部分重叠雷达观测的变分同化模型,并生成更为精确的降水场。下面我们将基于运算得到的结果进行分析。
后续见#参考内容:【文档】https://docs.qq.com/doc/DVXdTYmpjU2RGdnJi


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









