







SIFT算法大家都比较熟悉,网上的版本很多,刚开始接触时我主要研究的是C++,因为相对于C#,基于OPEN CV C++的SIFT算法资料更多,但是由于想要实现较为理想的界面效果,最终还是放弃了使用C++转而使用C#。
C#中SIFT算法主要分为三种:
1)脱离Emgu cv平台,完全手动实现所有SIFT算法函数,这样的程序虽然实现有些困难,但是完全可借助已有的C++程序做更改,而且这样做最大的好处就是对SIFT算法的原理有更深的理解。
2)实现时使用少量Emgu cv函数(例如影像的读取,灰度值获得等),但是大部分工作还是依赖于.net平台自行完成。
3)基本上程序完全借助于Emgu cv提供的接口,核心函数完全由Emgu cv提供。
前两类程序资源较多,大家也很容易下载,第三类程序资源相对较少,因此我今天简单为大家介绍第三类算法的实现方法,首先回顾一下SIFT算法计算步骤:
1. 尺度空间极值检测:搜索所有尺度上的图像位置。通过高斯微分函数来识别潜在的对于尺度和旋转不变的兴趣点。
2. 关键点定位:在每个候选的位置上,通过一个拟合精细的模型来确定位置和尺度。关键点的选择依据于它们的稳定程度。
3. 方向确定:基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向。所有后面的对图像数据的操作都相对于关键点的方向、尺度和位置进行变换,从而提供对于这些变换的不变性。
4. 关键点描述:在每个关键点周围的邻域内,在选定的尺度上测量图像局部的梯度。这些梯度被变换成一种表示,这种表示允许比较大的局部形状的变形和光照变化。
使用Emgu cv实现上述步骤非常简单,程序如下:
//确定匹配图像
Bitmap bt1 = new Bitmap(@"C:UsersGAOXIANGDesktopI.jpg");
Bitmap bt2 = new Bitmap(@"C:UsersGAOXIANGDesktop.jpg");
//将图像转为Emgu cv的处理格式
Image<Gray, byte> img1 = new Image<Gray, byte>(bt1);
Image<Gray, byte> img2 = new Image<Gray, byte>(bt2);
//使用Emgu cv探测图片特征点
SIFTDetector sift = new SIFTDetector();
var f1 = sift.DetectFeatures(img1, null);
var f2 = sift.DetectFeatures(img2, null);
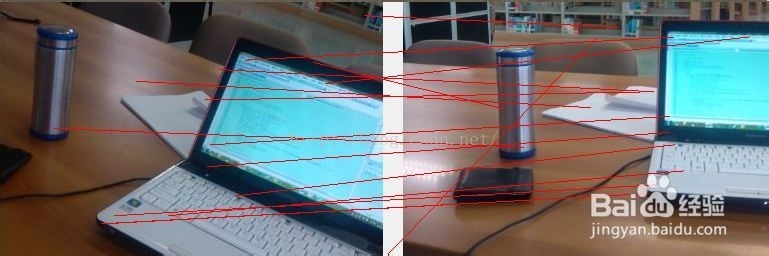
到此已经获得了两张相片的特征点f1,f2,接下来就是将相互匹配的特征点相连:
for (int i = 0; i < f1.Length; i++)
{ double[] dist = new double[f2.Length];
int n = 0;
int index = 0;
for (int j = 0; j < f2.Length; j++)
{
//计算待比较特征点描述子的欧式距离
dist[n++] = diedai(f1[i].Descriptor, f2[j].Descriptor);
}
//排序,获得欧式距离最近点以及次近点
for (int k = 0; k < 2; k++)
{ for (int k1 = k+1; k1 < dist.Length; k1++)
{ if (dist[k] > dist[k1])
{ double temp = dist[k];
dist[k] = dist[k1];
dist[k1] = temp;
//记录最近点在相片2中的序列
if (k == 0)
{ index = k1; } } } }
//若最近点与次近点比值小于阈值0.49,绘制特征点连线
if (dist[0]/dist[1] < 0.49)
{ PointF point1 = f1[i].KeyPoint.Point;
PointF point2 = f2[index].KeyPoint.Point;
Graphics g = this.CreateGraphics();
Pen p1 = new Pen(Color.Blue, 3);
g.DrawLine(p1, point1, point2);
//注意:point1,point2位置与具体控件,图像布局有关,请自行调整 }}
//描述子距离计算函数
private double diedai(float[] p1, float[] p2)
{ double sub=0; double sqrt=0;for (int i = 0; i < p1.Length; i++)
{ sub += Math.Pow(p1[i] - p2[i], 2); }
sqrt = Math.Sqrt(sub);
return sqrt;
}














 6720
6720











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









