







 本文详细阐述了CANoe自动化测试系统的架构,涉及SystemUnderTest、VTsystem和残余总线仿真,介绍了TestUnit与TestModule的区别,以及如何利用CAPL和XML模块进行脚本开发。重点讲解了TFS(TestFeatureSet)和TSL(TestServiceLibrary)的功能,包括约束设置、信号测试、等待指示等,并讨论了CAPL脚本的封装加密方法。
本文详细阐述了CANoe自动化测试系统的架构,涉及SystemUnderTest、VTsystem和残余总线仿真,介绍了TestUnit与TestModule的区别,以及如何利用CAPL和XML模块进行脚本开发。重点讲解了TFS(TestFeatureSet)和TSL(TestServiceLibrary)的功能,包括约束设置、信号测试、等待指示等,并讨论了CAPL脚本的封装加密方法。
基于CANoe的自动化测试系统的整体架构
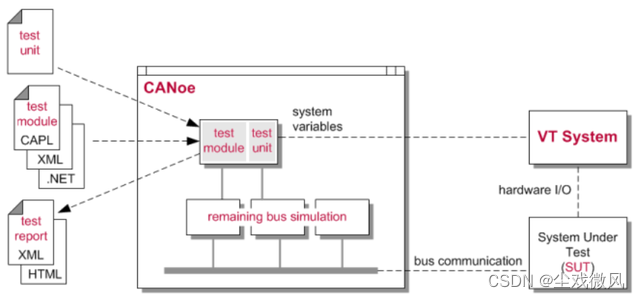
1. SUT:System Under Test 被测系统,一般是待测ECU;
2. VT System:VT system是由一系列硬件板卡组成的ECU功能测试模块,通过连接ECU的I/O线路对ECU进行测试;
3. Remaining bus simulation:残余总线仿真。实际应用中SUT只是总线中的一个ECU节点,总线环境是复杂的,CANoe可以仿真除了SUT之外的总线环境,即残余总线仿真。
Test Unit和Test Module的区别
(1)Test Unit在Test Configuration窗口定义,用户需要根据Vector提供的软件vTESTstudio创建测试用例,然后将测试用例导入CANoe Test Unit运行。
(2)Test Module在 Test Setup for Test Modules 中定义,Test Module支持三种不同语言类型的测试模块:CAPL
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1097
1097

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









