






KRC4配置 EtherCAT输入输出模块,KUKA工程师必知
KRC4 配置 EtherCAT 输入输出模块
KRC4 原生支持 ethercat 协议,所以在 SYS-X44 接口上加入 EK1100 耦合器后,就可以增添离散IO模块。但是 EtherCat I/O 不支持 couple/uncouple。 本文欲在 KRC4 配置 DeviceNet 接口 基础上,继续添加一块输入模块 EL1008 和输出模块 EL2008,同时附加一块电源模块 EL9100。

一、硬件准备 Hardware
1. KUKA KRC4 控制器
2. Beckhoff EK1100 耦合器
3. Beckhoff 电源模块 EL9100 EL9100
4. Beckhoff 输入模块 EL1008 EL1008
5. Beckhoff 输出模块 EL2008 EL2008
二、软件准备 Software
1. 与控制器相对应的 WorkVisual 版本 (随机光盘) 2. Beckhoff EtherCAT 的 device deion 文件 Beckhoff_EtherCAT_XML (可从官方下载)
三、硬件连接 Connection
参照电气图纸将硬件连接。

四、软件配置 Configration
1.导入设备描述文件
参见 Workvisual。这里需要导入 EL1XXX 和 EL2XXX 两个文件。对应 输入模块 EL1008 和输出模块 EL2008。
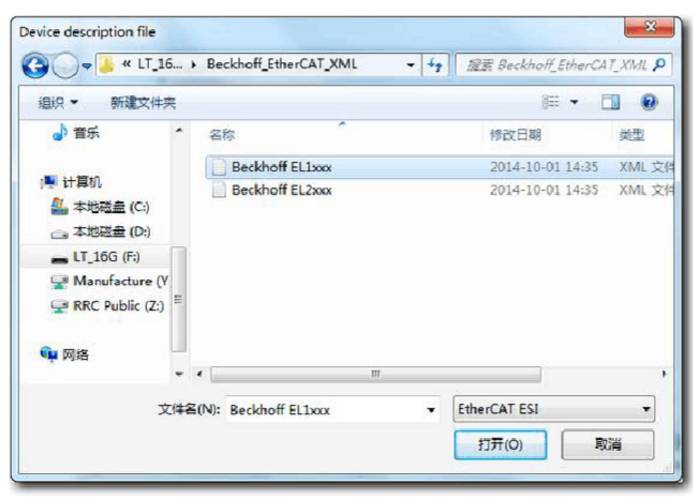
打开Workvisual菜单File→Import/Export → Import device deion file → 选择文件类型ESI,导入。打开 Workvisual, 菜单 File→ Import/Export → Import device deion file → 选择文件类型 ESI,导入。
2.总线配置
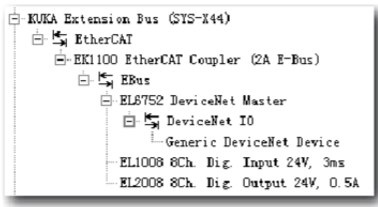
通过WorkVisual进行配置。按照硬件顺序,依次在 EK1100→Ebus 节点插入 EL1008 和 EL2008 ,不需要插入电源模块。 配置完成的总线结构如下图:
插入完成后,deploy 到KRC4控制器。注意观察SmartPAD上的消息以及模块的指示灯,确认模块是否被正常识别

五、输入输出映射设置 IO mapping
在IO MAP 窗口根据需要,进行相应的IO映射。具体过程不再赘述,可参考 WorkVisual 中映射输入输出 IO MAPPING。
六、批量部署配置 Configuration Deployment
如果有多台机器人控制器需要配置相同的焊机,参考 WorkVisual 中映射输入输出 IO MAPPING。

















 4686
4686

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









