







 本文介绍了步态能量图(GEI),一种常用的步态识别特征。GEI通过简单的计算方法能体现步态的速度和形态特征。内容包括GEI的定义、步态周期的判断以及如何从步态剪影生成GEI的步骤。
本文介绍了步态能量图(GEI),一种常用的步态识别特征。GEI通过简单的计算方法能体现步态的速度和形态特征。内容包括GEI的定义、步态周期的判断以及如何从步态剪影生成GEI的步骤。
GEI简介
步态能量图(Gait Engery Image, GEI)是步态检测中最非常常用的特征,提取方法简单,也能很好的表现步态的速度,形态等特征。其定义如下:

其中,
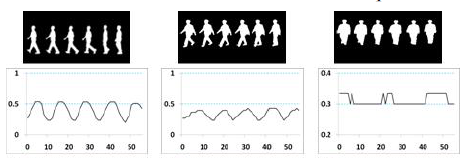
步态周期的判断使用步态剪影的宽、高之比即可,这个值比较容易而且随步态状态呈现周期性变化。
步态剪影
单张步态剪影图需调节成宽为W,高为H的大小。调节时保持剪影的比例不变,即如果剪影本身w'/h'<W/H,则将剪影放缩为W*(W*h'/w')大小,并在W*H竖直居中放置。
得到rescaled的步态剪影的代码:
// get resized gait image
if(!walk_img.empty()){
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
Mat walk_ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5720
5720

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









