









Linux的uart串口,无论是rs232格式的还是rs485格式的 ,最终都封装为tty接口。一般串口驱动都是芯片厂商开发好的。我们基本只要正确使用就能正常工作。
我这边开发的时候,使用应用层的测试程序发现,部分16进制数据,接收后数据打印错误,比如0x0d。还有部分16进制数据,无法接收,比如0x11、0x13。对于字符串类型,显示倒是正确的。比如“0~9”,“a~z”,"A~Z"。然后翻了很多资料,也看了驱动的源代码,最后发现是应用层的接收数据设置不正确。串口的设置主要是设置struct termios。把数据接收设置为原始模式就可以正常工作了。
源代码片段:
![]()
修改后的代码片段:

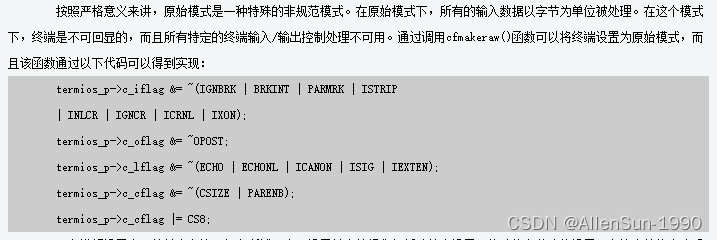
终端有三种工作模式,分别为规范模式(canonical mode)、非规范模式(non-canonical mode)和原始模式(raw mode)。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <termios.h>
#include <errno.h>
#include <getopt.h>
#include <string.h>
#define FALSE 1
#define TRUE 0
char *recchr="We received:\"";
void print_usage();
int speed_arr[] = {
B921600, B460800, B230400, B115200, B57600, B38400, B19200,
B9600, B4800, B2400, B1200, B300,
};
int name_arr[] = {
921600, 460800, 230400, 115200, 57600, 38400, 19200,
9600, 4800, 2400, 1200, 300,
};
void set_speed(int fd, int speed)
{
int i;
int status;
struct termios Opt;
tcgetattr(fd, &Opt);
for ( i= 0; i < sizeof(speed_arr) / sizeof(int); i++) {
if (speed == name_arr[i]) {
tcflush(fd, TCIOFLUSH);
cfsetispeed(&Opt, speed_arr[i]);
cfsetospeed(&Opt, speed_arr[i]);
status = tcsetattr(fd, TCSANOW, &Opt);
if (status != 0)
perror("tcsetattr fd1");
return;
}
tcflush(fd,TCIOFLUSH);
}
if (i == 12){
printf("\tSorry, please set the correct baud rate!\n\n");
print_usage(stderr, 1);
}
}
/*
*@brief 设置串口数据位,停止位和效验位
*@param fd 类型 int 打开的串口文件句柄*
*@param databits 类型 int 数据位 取值 为 7 或者8*
*@param stopbits 类型 int 停止位 取值为 1 或者2*
*@param parity 类型 int 效验类型 取值为N,E,O,,S
*/
int set_Parity(int fd,int databits,int stopbits,int parity)
{
struct termios options;
if ( tcgetattr( fd,&options) != 0) {
perror("SetupSerial 1");
return(FALSE);
}
options.c_cflag &= ~CSIZE ;
switch (databits) /*设置数据位数*/ {
case 7:
options.c_cflag |= CS7;
break;
case 8:
options.c_cflag |= CS8;
break;
default:
fprintf(stderr,"Unsupported data size\n");
return (FALSE);
}
switch (parity) {
case 'n':
case 'N':
options.c_cflag &= ~PARENB; /* Clear parity enable */
options.c_iflag &= ~INPCK; /* Enable parity checking */
break;
case 'o':
case 'O':
options.c_cflag |= (PARODD | PARENB); /* 设置为奇效验*/
options.c_iflag |= INPCK; /* Disnable parity checking */
break;
case 'e':
case 'E':
options.c_cflag |= PARENB; /* Enable parity */
options.c_cflag &= ~PARODD; /* 转换为偶效验*/
options.c_iflag |= INPCK; /* Disnable parity checking */
break;
case 'S':
case 's': /*as no parity*/
options.c_cflag &= ~PARENB;
options.c_cflag &= ~CSTOPB;
break;
default:
fprintf(stderr,"Unsupported parity\n");
return (FALSE);
}
/* 设置停止位*/
switch (stopbits) {
case 1:
options.c_cflag &= ~CSTOPB;
break;
case 2:
options.c_cflag |= CSTOPB;
break;
default:
fprintf(stderr,"Unsupported stop bits\n");
return (FALSE);
}
/* Set input parity option */
if (parity != 'n')
options.c_iflag |= INPCK;
options.c_cc[VTIME] = 150; // 15 seconds
options.c_cc[VMIN] = 0;
options.c_lflag &= ~(ECHO | ICANON);
tcflush(fd,TCIFLUSH); /* Update the options and do it NOW */
if (tcsetattr(fd,TCSANOW,&options) != 0) {
perror("SetupSerial 3");
return (FALSE);
}
return (TRUE);
}
/**
*@breif 打开串口
*/
int OpenDev(char *Dev)
{
int fd = open( Dev, O_RDWR ); //| O_NOCTTY | O_NDELAY
if (-1 == fd) { /*设置数据位数*/
perror("Can't Open Serial Port");
return -1;
} else
return fd;
}
/* The name of this program */
const char * program_name;
/* Prints usage information for this program to STREAM (typically
* stdout or stderr), and exit the program with EXIT_CODE. Does not
* return.
*/
void print_usage (FILE *stream, int exit_code)
{
fprintf(stream, "Usage: %s option [ dev... ] \n", program_name);
fprintf(stream,
"\t-h --help Display this usage information.\n"
"\t-d --device The device ttyS[0-3] or ttySCMA[0-1]\n"
"\t-b --baudrate Set the baud rate you can select\n"
"\t [230400, 115200, 57600, 38400, 19200, 9600, 4800, 2400, 1200, 300]\n"
"\t-s --string Write the device data\n");
exit(exit_code);
}
/*
*@breif main()
*/
int main(int argc, char *argv[])
{
int fd, next_option, havearg = 0;
char *device;
int i=0,j=0;
int nread; /* Read the counts of data */
char buff[512]; /* Recvice data buffer */
pid_t pid;
char *xmit = "1234567890"; /* Default send data */
int speed, send_mode = 0;
const char *const short_options = "hd:s:b:m:";
const struct option long_options[] = {
{ "help", 0, NULL, 'h'},
{ "device", 1, NULL, 'd'},
{ "string", 1, NULL, 's'},
{ "baudrate", 1, NULL, 'b'},
{ "send/recv mode", 0, NULL, 'm'},
{ NULL, 0, NULL, 0 }
};
program_name = argv[0];
do {
next_option = getopt_long (argc, argv, short_options, long_options, NULL);
switch (next_option) {
case 'h':
print_usage (stdout, 0);
case 'd':
device = optarg;
havearg = 1;
break;
case 'b':
speed = atoi(optarg);
break;
case 's':
xmit = optarg;
havearg = 1;
break;
case 'm':
send_mode = atoi(optarg);
break;
case -1:
if (havearg) break;
case '?':
print_usage (stderr, 1);
default:
abort ();
}
}while(next_option != -1);
sleep(1);
fd = OpenDev(device);
if (fd > 0) {
set_speed(fd, speed);
} else {
fprintf(stderr, "Error opening %s: %s\n", device, strerror(errno));
exit(1);
}
if (set_Parity(fd,8,1,'N')== FALSE) {
fprintf(stderr, "Set Parity Error\n");
close(fd);
exit(1);
}
#if 0
pid = fork();
if (pid < 0) {
fprintf(stderr, "Error in fork!\n");
} else if (pid == 0){
#endif
if (send_mode){
while(1) {
printf("%s SEND: %s\n",device, xmit);
write(fd, xmit, strlen(xmit));
sleep(1);
i++;
}
}else {
while(1) {
nread = read(fd, buff, sizeof(buff));
if (nread > 0) {
buff[nread] = '\0';
printf("%s RECV[%d]: %s\n", device, nread, buff);
}
}
}
close(fd);
exit(0);
}
run.sh
#!/bin/bash
./uart_test -d /dev/ttySTM2 -b 115200测试程序运行结果:
root@localhost:/home/uas/bin# ./run.sh
RECV nread = 256
RECV[0]: 0
...
RECV[255]: 255
















 1796
1796











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











