









内容来自RyiSnow视频讲解
Step by Step Explanation of A* Algorithm in Java
前言
这里作者在讲到2D历险记动作角色扮演游戏的时候,为了实现怪物或NPC跟踪玩家的功能使用到的算法。
这个视频是一个单独的讲解。最终效果,实现了玩家走到哪里怪物和NPC就跟到哪里。
作者用Java Swing可视化的方式详细讲解了A*寻路的实现过程。
效果
应用场景
在RPG游戏中,经常会有,玩家在地图点击一个点,让人物角色自动走过去的需求,或者怪物跟踪玩家,或者让NPC跟随自己。这些都是比较常见的应用场景。
起点和目标点或许有障碍物阻挡,有走来走去的某种角色阻挡。所以有人实现了一个算法,这样角色就可以自动计算最佳路径,总是能够适应屏幕上的情况,而不会卡在一个障碍物哪里过不去。
A*算法很好的实现了这个目的,被认为是最流行寻路算法之一。
具体过程
公式
f ( n ) = g ( n ) + h ( n ) f(n) = g(n) + h(n) f(n)=g(n)+h(n)
这里有三个点,起点、当前点、目标点,(start, current, goal)其中g(n)代表当前点与起点的距离,h(n)代表当前点与目标点的距离,f(n)代表两者之和。开始的时候起点也是当前点。
(这里以距离为例,实际情况可能是时间或金钱花费)
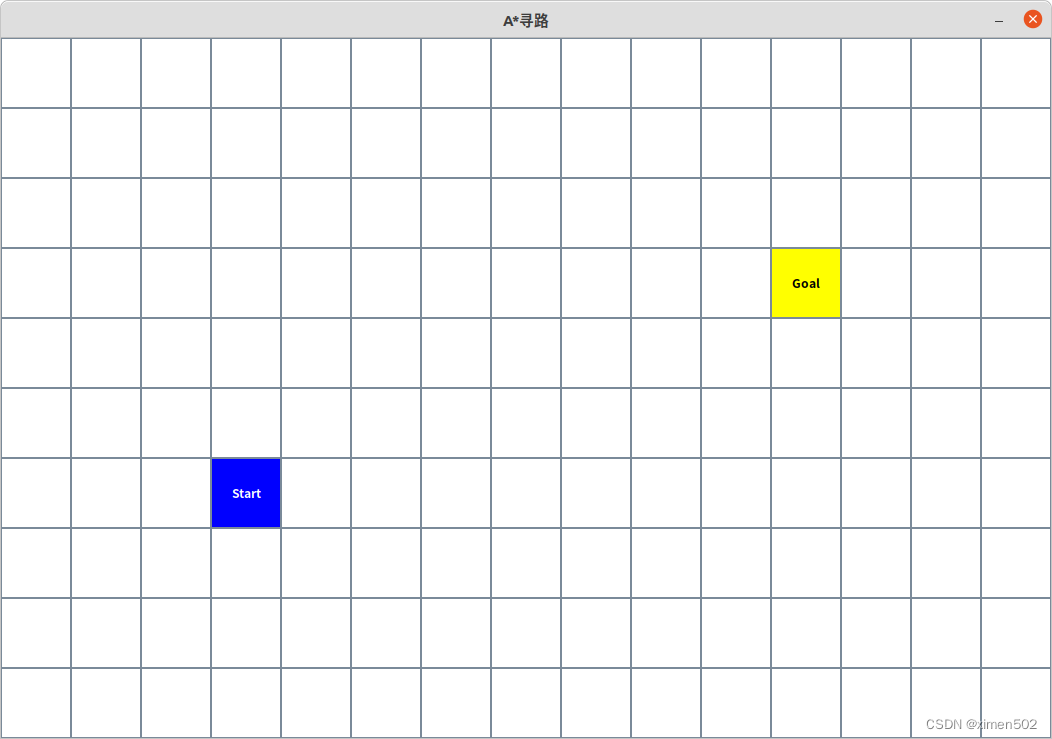
如果每个格子都是开放的,都可通过,他们之间也没有障碍物的话,找到最佳路径是容易的。
我们在2个点之间增加障碍物。


现在讨论一下A*寻路算法的实现机制。
为了评估最佳或最短路径, A*算法使用3个数字,他们分别被称为G cost(花费), H cost, F cost。
G cost当前点与起点之间的距离,这里的距离是两点之间的格子数。当前点一般在游戏中表示角色所在位置。
H cost当前点与目标点之间的距离。
F cost为G, F两者之和。
代码
示例代码中定义了一个Node类,其中包含三个变量gCost, hCost, fCost ,分别表示对应的花费,算法评估这三个花费,用于找出哪个节点是抵达目标节点最有希望的节点。
这三个花费里面,F花费是最重要的一个,因为它代表了总的花费。
计算每个Node节点的G,H,F
private void getCost(Node node) {
// GET G COST (The distance from the start node)
int xDistance = Math.abs(node.col - startNode.col);
int yDistance = Math.abs(node.row - startNode.row);
node.gCost = xDistance + yDistance;
// Get H Cost (The distance from the goal node)
xDistance = Math.abs(node.col - goalNode.col);
yDistance = Math.abs(node.row - goalNode.row);
node.hCost = xDistance + yDistance;
// Get F cost (The total cost)
node.fCost = node.gCost + node.hCost;
// Display the cost on node
if (node != startNode && node != goalNode) {
String text = "<html>F:" + node.fCost + "<br>G:" + node.gCost + "</html>";
node.setText(text);
}
}
这里以两点之间的格子数作为距离。横纵坐标之和即两点间总的距离。这样G,H,F就都算出来了,接下来把他们显示在页面上。这里作者有意不显示H,如果有需要可以自己加上。
算法执行过程
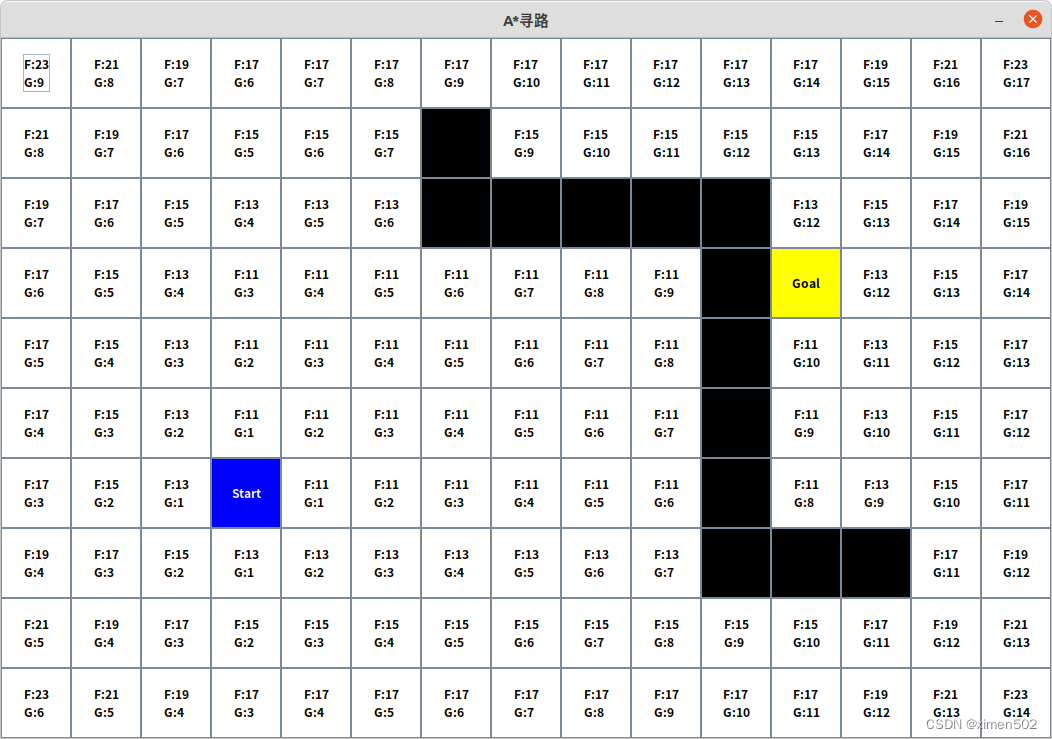
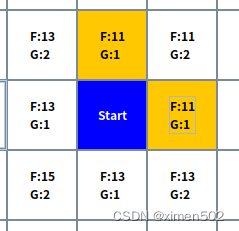
假设起点位置是玩家或NPC或其他任意角色,假设四个方向,上下左右都可以行走,在上图,先看相邻节点F cost,起点Start上下左右,左边、下边节点F为13,上边、右边节点F为11,显然上、右节点更有希望是距离最短路线上的点,再看G cost,两个节点G cost都是1,那么这两个节点就被选中。
继续以他们作为当前节点,继续向后评估F,G,选择节点。
在代码中search方法负责,将当前start起点的四个方向节点添加到一个ArrayList列表中,并将当前节点作为他们的父节点,方便回溯找路线,然后定义2个变量分别代表最佳节点索引bestNodeIndex=0,最佳节点fCost花费初始值bestNodefCost假设为999。(999需要根据实际情况来,不一定要用999)。
然后遍历这个ArrayList,根据fCost比较找到fCost更小的节点,如果fCost相等,则比较gCost,这时以gCost最小的节点为最有希望的节点。相应的修改bestNodeIndex与bestNodefCost。记录当前节点currentNode为找到的最有希望的节点,判断是否是目标节点,是的话,查找就不再执行了。
如果当前节点不是目标节点,在下一次查找中就会从ArrayList中移除掉currentNode,根据fCost和gCost继续遍历查找节点。直到找到目标节点。
代码
public void search() {
if (!goalReached) {
int col = currentNode.col;
int row = currentNode.row;
currentNode.setAsChecked();
checkedList.add(currentNode);
openList.remove(currentNode);
// open the up node
if (row - 1 >= 0) {
openNode(node[col][row - 1]);
}
// open the left node
if (col - 1 >= 0) {
openNode(node[col-1][row]);
}
// open the down node
if (row + 1 < maxRow) {
openNode(node[col][row+1]);
}
// open the right node
if (col + 1 < maxCol) {
openNode(node[col+1][row]);
}
// Find the best node
int bestNodeIndex = 0;
int bestNodefCost = 999;
for (int i = 0; i < openList.size(); i++) {
//Check if this node's F cost is better
if (openList.get(i).fCost < bestNodefCost) {
bestNodefCost = openList.get(i).fCost;
bestNodeIndex = i;
}
//If F cost is equal , check the G cost
else if (openList.get(i).fCost == bestNodefCost) {
if (openList.get(i).gCost < openList.get(bestNodeIndex).gCost) {
bestNodeIndex = i;
}
}
}
// After the loop, we get the best node which is out next step
currentNode = openList.get(bestNodeIndex);
if (currentNode == goalNode) {
goalReached = true;
}
}
}
private void openNode(Node node) {
if (!node.open && !node.checked && !node.solid) {
// If the node is not opened yet, add it to the open list
node.setAsOpen();
node.parent = currentNode;
openList.add(node);
}
}
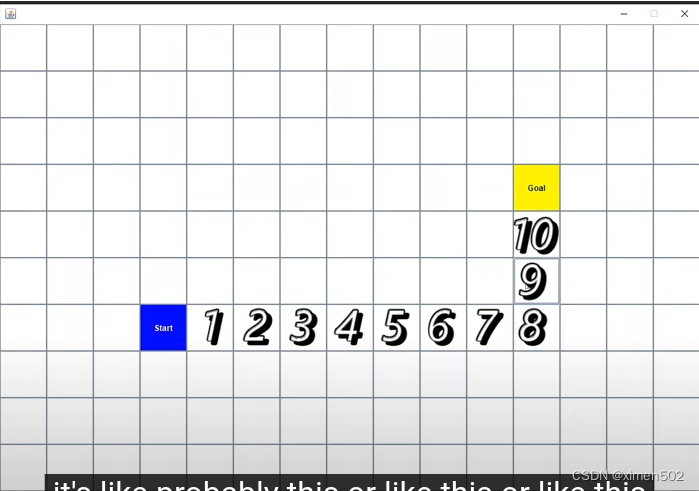
- Track the nodes back and draw the path沿着节点原路返回,画出最短路径。
private void trackThePath() {
// Backtrack and draw the best path
Node current = goalNode;
while (current != startNode) {
current = current.parent;
if (current != startNode) {
current.setAsPath();
}
}
}
定义
A*(发音为“A-star”)是一种图遍历和寻路 算法,由于其完整性、最优性和最优效率而被应用于计算机科学的许多领域。 [1]给定一个加权图、一个源节点和一个目标节点,该算法找到从源到目标的最短路径(相对于给定的权重)。
一个主要的实际缺点是它的空间复杂度,因为它将所有生成的节点存储在内存中。因此,在实际的旅行路线系统中,可以预处理图形以获得更好性能的算法通常优于[2]以及内存有限的方法;然而,在许多情况下,A* 仍然是最佳解决方案。[3]
斯坦福研究院(现SRI International )的Peter Hart、Nils Nilsson和Bertram Raphael于 1968 年首次发表了该算法。[4]可以将其视为Dijkstra 算法的扩展。 A* 通过使用启发式方法来指导其搜索,从而获得更好的性能。
与Dijkstra算法相比,A*算法只找到从指定源到指定目标的最短路径,而不是从指定源到所有可能目标的最短路径树。这是使用特定目标导向启发式的必要权衡。对于Dijkstra算法,由于生成了整个最短路径树,所以每个节点都是一个目标,并且不可能有特定目标导向的启发式。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









