







一、相机畸变
定义:相机镜头的畸变实际上是光学透镜固有的透视失真的总称。
相机畸变的分类:
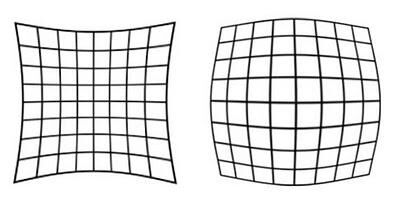
1、枕形畸变:又称鞍形形变,视野中边缘区域的放大率远大于光轴中心区域的放大率,常用在远摄镜头中(下图左);
2、桶形畸变,与枕形畸变相反,视野中光轴中心区域的放大率远大于边缘区域的放大率,常出现在广角镜头和鱼眼镜头中(下图中);
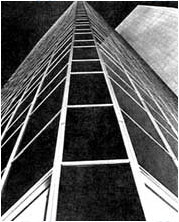
3、线性畸变:光轴与相机所拍摄的诸如建筑物类的物体的垂平面不正交,则原本应该平行的远端一侧和近端一侧,以不相同的角度汇聚产生畸变。这种畸变本质上是一种透视变换,即在某一特定角度,任何镜头都会产生相似的畸变(下图右)。
二、相机的畸变模型
相机的针孔模型,只是真实相机的一个近似,由于存在各种镜头的畸变和变形,所以真实的相机要比模型复杂的多。在引入各种非线性的畸变修正之后,就形成看复杂的非线性成像模型。镜头的畸变主要分为径向畸变、离心畸变和薄棱镜畸变三类。
2.1 径向畸变
定义:使像点产生径向位置的偏差。径向畸变又分为正向畸变和负向畸变,正向畸变称为枕形畸变,负向畸变称为桶形畸变;
特点:由镜头的形状缺陷所造成的畸变,关于相机主光轴对称。
数学模型:

其中,

若令

2.2 离心畸变
定义:光学系统的光学中心和几何中心不一致(镜头各器件的光学中心)所造成的畸变;
特点:既包含径向畸变,又包含镜头主光轴不对称多造成的切向畸变。
数学模型:

p1,p2为切向畸变系数。
2.3 薄棱镜畸变
定义:镜头设计缺陷与加工安装误差所造成;
特点:同时引起径向畸变和切向畸变,高价位镜头可以忽略薄棱镜畸变。
数学模型:
s1,s2为薄棱镜畸变系数。
2.4 总结
由于图像点存在偏差,所以在建模时需要进行相应的畸变补差。实际图像点的坐标为

实际计算中可以只考虑每种计算的前两阶畸变系数。















 2129
2129

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









