






基于A*算法的路径规划仿真
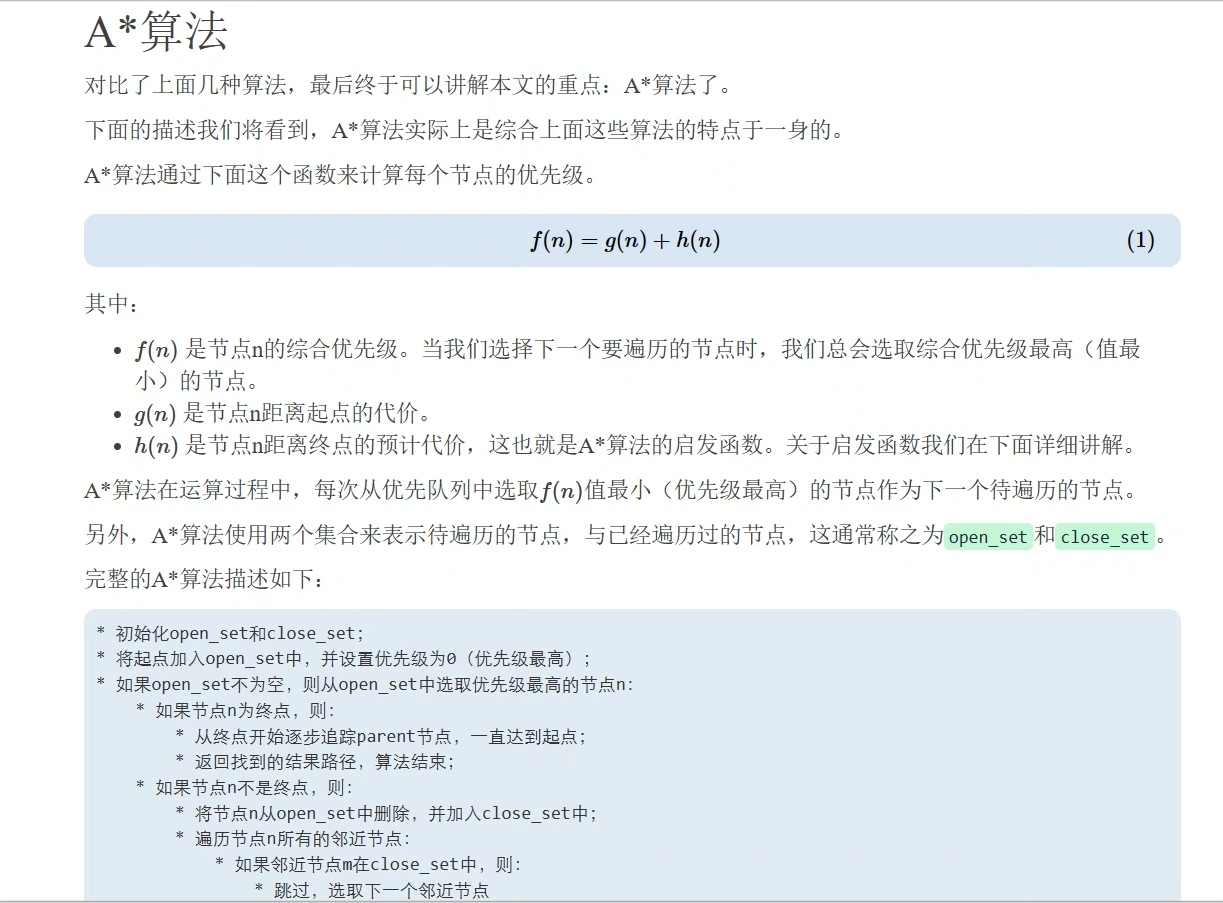
A*算法通过包含启发信息的代价函数来搜索最优路径,代价函数f(n)由两部分组成:起点沿着已生成的路径到达当前节点的开销g(n)和当前节点到终点的预估开销h(n),
f(n) = g(n)+ h(n)
ID:9340713177210627
喜欢可爱的猫猫
基于A*算法的路径规划仿真
路径规划是在计算机科学和人工智能领域中一个重要的问题,它涉及到如何在给定的地图上找到一个最优路径,以实现从起点到终点的导航。A*算法是一种常用的路径规划算法,它通过结合启发式函数来搜索最优路径。
A*算法的核心思想是使用一个代价函数f(n)来评估每个节点的优先级,其中代价函数由两部分构成:节点从起点沿着已生成的路径到达当前节点的开销g(n)和当前节点到终点的预估开销h(n)。代价函数的定义如下:
f(n) = g(n) + h(n)
其中,g(n)表示节点从起点到达当前节点的实际开销,h(n)表示当前节点到终点的预估开销。A*算法通过选择具有最小f(n)值的节点进行扩展,以便优先搜索最有希望的路径。
在路径规划仿真中,我们可以使用A算法来评估不同路径规划算法的性能和效果。通过构建一个仿真环境,我们可以模拟不同场景下的路径规划问题,并比较A算法与其他算法的表现。
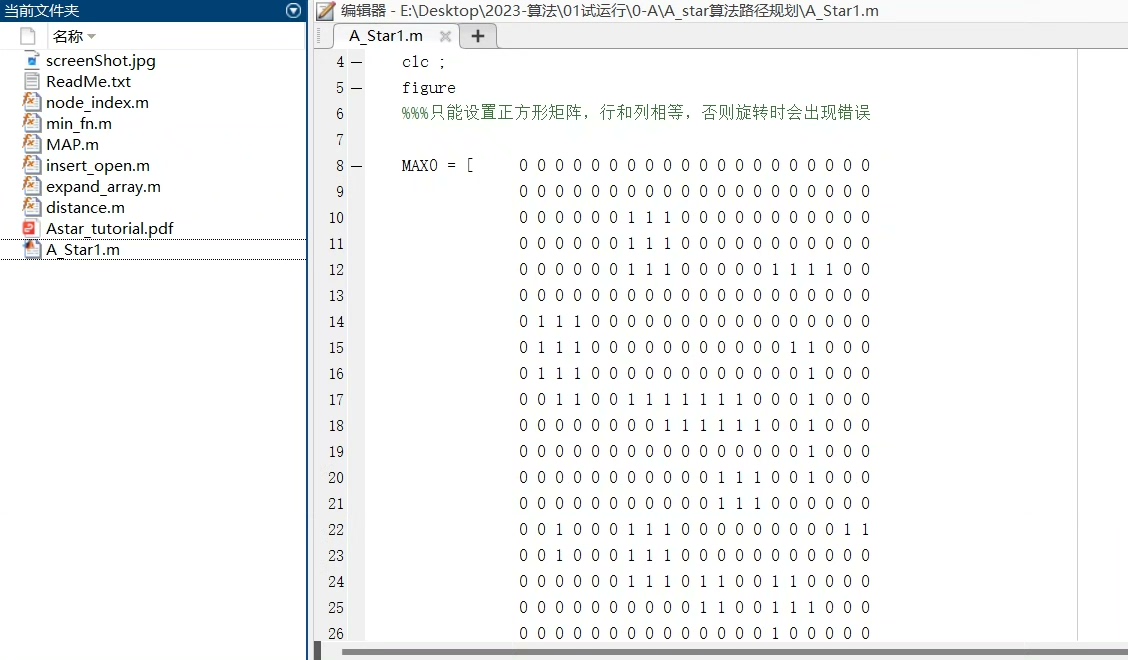
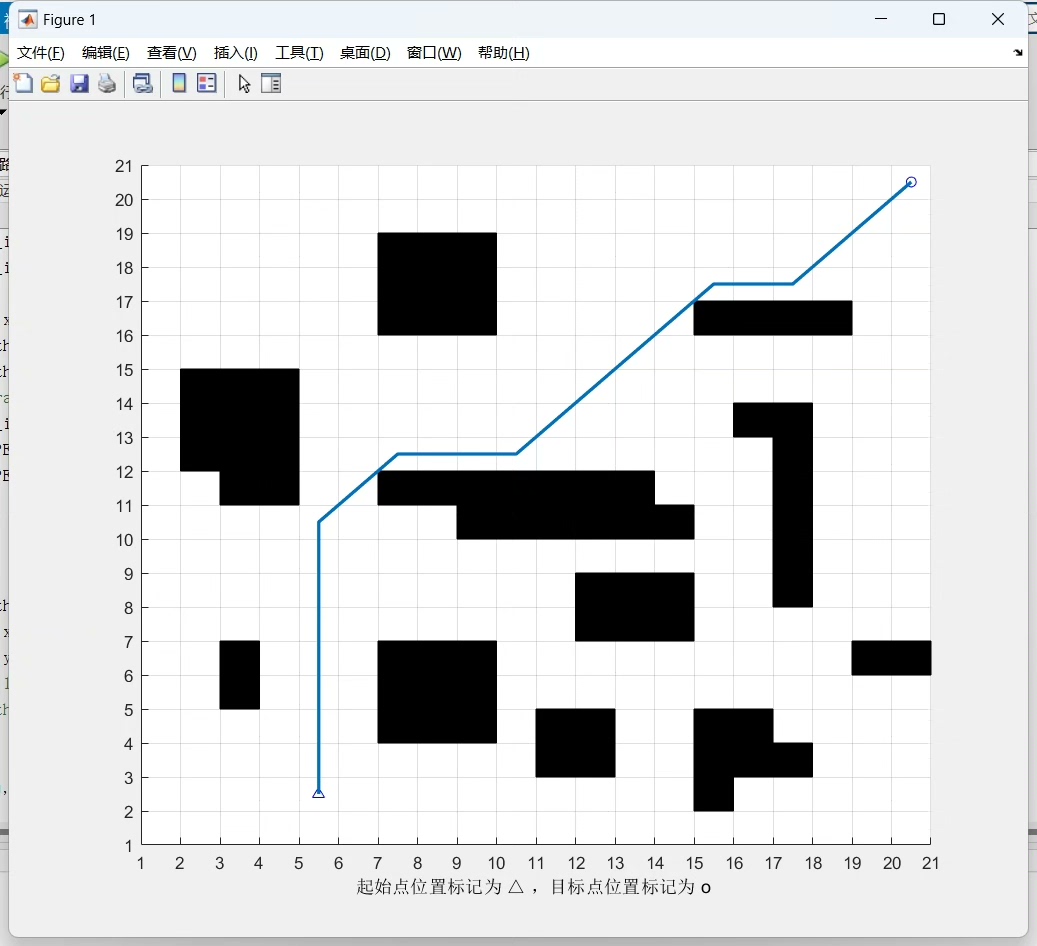
首先,我们需要定义一个地图以及起点和终点的位置。地图可以使用二维数组或者图的数据结构来表示,每个位置可以是可通过的空地、障碍物或者其他特殊地形。起点和终点可以用坐标来表示。
接下来,我们需要实现A*算法的核心逻辑。首先,我们需要定义一个优先级队列来存储待扩展的节点。每次从队列中选择优先级最高(即f(n)值最小)的节点进行扩展。在节点的扩展过程中,需要计算节点的g(n)和h(n)值,并将扩展后的节点加入优先级队列中。直到找到终点或者队列为空时,算法停止并返回最优路径。
在仿真过程中,我们可以设置不同的启发式函数来评估节点的预估开销h(n)。常用的选择包括曼哈顿距离、欧几里得距离和切比雪夫距离等。我们可以通过比较不同启发式函数的效果来评估A*算法在不同场景下的性能。
此外,我们还可以进行路径规划算法的性能评估和优化。通过记录算法的运行时间、生成的节点数量和路径长度等指标,我们可以比较不同算法的效率。并可以尝试使用一些优化技术,如剪枝和启发式搜索等,来提高算法的性能。
总之,基于A算法的路径规划仿真是一个有趣且具有挑战性的问题。通过构建一个仿真环境,并利用A算法来解决路径规划问题,我们可以深入理解算法的原理和性能,并为实际应用提供参考。未来,我们可以进一步研究路径规划算法的优化和扩展,以应对更复杂的实际场景。
【相关代码,程序地址】:http://fansik.cn/713177210627.html
















 6966
6966











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









