






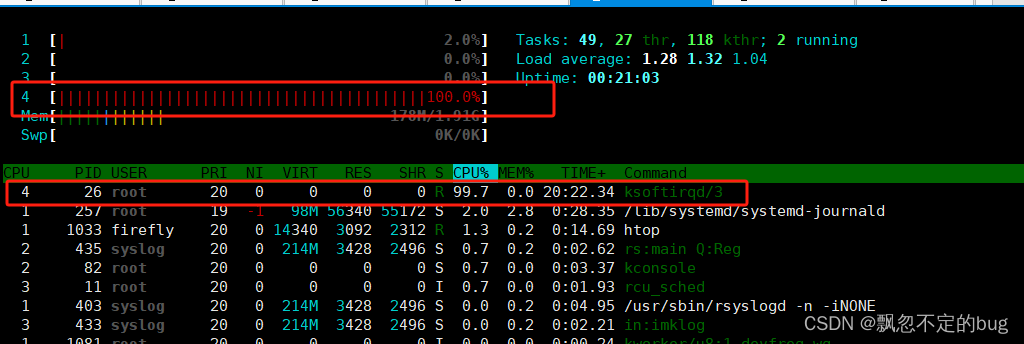
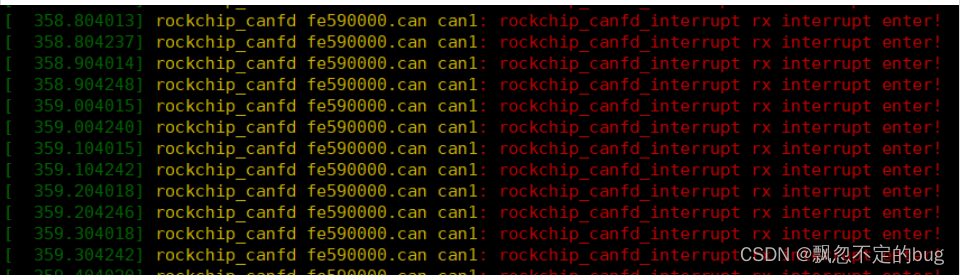
最近调试RK3568 CAN时发现,当CAN作为接收端,在快速接收数据时会导致cpu4满载。down掉can口或者断开外设时恢复正常。并且问题只是在部门CPU版本上出现。在CAN接收中断中打印log,能发现log是按照接收数据的时间打印的。
驱动(rockchip_canfd.c)中关闭NAPI后正常,厂家的回复是“有的产品api不同,NAPI方式并不适用”。
// SPDX-License-Identifier: GPL-2.0
/*
* Copyright (c) 2020 Rockchip Electronics Co. Ltd.
* Rockchip CANFD driver
*/
#include <linux/delay.h>
#include <linux/iopoll.h>
#include <linux/pinctrl/consumer.h>
#include <linux/clk.h>
#include <linux/errno.h>
#include <linux/init.h>
#include <linux/interrupt.h>
#include <linux/io.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/netdevice.h>
#include <linux/of.h>
#include <linux/of_device.h>
#include <linux/platform_device.h>
#include <linux/skbuff.h>
#include <linux/spinlock.h>
#include <linux/string.h>
#include <linux/types.h>
#include <linux/can/dev.h>
#include <linux/can/error.h>
#include <linux/can/led.h>
#include <linux/reset.h>
#include <linux/pm_runtime.h>
#include <linux/rockchip/cpu.h>
/* registers definition */
enum rockchip_canfd_reg {
CAN_MODE = 0x00,
CAN_CMD = 0x04,
CAN_STATE = 0x08,
CAN_INT = 0x0c,
CAN_INT_MASK = 0x10,
CAN_LOSTARB_CODE = 0x28,
CAN_ERR_CODE = 0x2c,
CAN_RX_ERR_CNT = 0x34,
CAN_TX_ERR_CNT = 0x38,
CAN_IDCODE = 0x3c,
CAN_IDMASK = 0x40,
CAN_TX_CHECK_FIC = 0x50,
CAN_NBTP = 0x100,
CAN_DBTP = 0x104,
CAN_TDCR = 0x108,
CAN_TSCC = 0x10c,
CAN_TSCV = 0x110,
CAN_TXEFC = 0x114,
CAN_RXFC = 0x118,
CAN_AFC = 0x11c,
CAN_IDCODE0 = 0x120,
CAN_IDMASK0 = 0x124,
CAN_IDCODE1 = 0x128,
CAN_IDMASK1 = 0x12c,
CAN_IDCODE2 = 0x130,
CAN_IDMASK2 = 0x134,
CAN_IDCODE3 = 0x138,
CAN_IDMASK3 = 0x13c,
CAN_IDCODE4 = 0x140,
CAN_IDMASK4 = 0x144,
CAN_TXFIC = 0x200,
CAN_TXID = 0x204,
CAN_TXDAT0 = 0x208,
CAN_TXDAT1 = 0x20c,
CAN_TXDAT2 = 0x210,
CAN_TXDAT3 = 0x214,
CAN_TXDAT4 = 0x218,
CAN_TXDAT5 = 0x21c,
CAN_TXDAT6 = 0x220,
CAN_TXDAT7 = 0x224,
CAN_TXDAT8 = 0x228,
CAN_TXDAT9 = 0x22c,
CAN_TXDAT10 = 0x230,
CAN_TXDAT11 = 0x234,
CAN_TXDAT12 = 0x238,
CAN_TXDAT13 = 0x23c,
CAN_TXDAT14 = 0x240,
CAN_TXDAT15 = 0x244,
CAN_RXFIC = 0x300,
CAN_RXID = 0x304,
CAN_RXTS = 0x308,
CAN_RXDAT0 = 0x30c,
CAN_RXDAT1 = 0x310,
CAN_RXDAT2 = 0x314,
CAN_RXDAT3 = 0x318,
CAN_RXDAT4 = 0x31c,
CAN_RXDAT5 = 0x320,
CAN_RXDAT6 = 0x324,
CAN_RXDAT7 = 0x328,
CAN_RXDAT8 = 0x32c,
CAN_RXDAT9 = 0x330,
CAN_RXDAT10 = 0x334,
CAN_RXDAT11 = 0x338,
CAN_RXDAT12 = 0x33c,
CAN_RXDAT13 = 0x340,
CAN_RXDAT14 = 0x344,
CAN_RXDAT15 = 0x348,
CAN_RXFRD = 0x400,
CAN_TXEFRD = 0x500,
};
enum {
ROCKCHIP_CANFD_MODE = 0,
ROCKCHIP_CAN_MODE,
ROCKCHIP_RK3568_CAN_MODE,
ROCKCHIP_RK3568_CAN_MODE_V2,
};
#define DATE_LENGTH_12_BYTE (0x9)
#define DATE_LENGTH_16_BYTE (0xa)
#define DATE_LENGTH_20_BYTE (0xb)
#define DATE_LENGTH_24_BYTE (0xc)
#define DATE_LENGTH_32_BYTE (0xd)
#define DATE_LENGTH_48_BYTE (0xe)
#define DATE_LENGTH_64_BYTE (0xf)
#define CAN_TX0_REQ BIT(0)
#define CAN_TX1_REQ BIT(1)
#define CAN_TX_REQ_FULL ((CAN_TX0_REQ) | (CAN_TX1_REQ))
#define MODE_FDOE BIT(15)
#define MODE_BRSD BIT(13)
#define MODE_SPACE_RX BIT(12)
#define MODE_AUTO_RETX BIT(10)
#define MODE_RXSORT BIT(7)
#define MODE_TXORDER BIT(6)
#define MODE_RXSTX BIT(5)
#define MODE_LBACK BIT(4)
#define MODE_SILENT BIT(3)
#define MODE_SELF_TEST BIT(2)
#define MODE_SLEEP BIT(1)
#define RESET_MODE 0
#define WORK_MODE BIT(0)
#define RX_FINISH_INT BIT(0)
#define TX_FINISH_INT BIT(1)
#define ERR_WARN_INT BIT(2)
#define RX_BUF_OV_INT BIT(3)
#define PASSIVE_ERR_INT BIT(4)
#define TX_LOSTARB_INT BIT(5)
#define BUS_ERR_INT BIT(6)
#define RX_FIFO_FULL_INT BIT(7)
#define RX_FIFO_OV_INT BIT(8)
#define BUS_OFF_INT BIT(9)
#define BUS_OFF_RECOVERY_INT BIT(10)
#define TSC_OV_INT BIT(11)
#define TXE_FIFO_OV_INT BIT(12)
#define TXE_FIFO_FULL_INT BIT(13)
#define WAKEUP_INT BIT(14)
#define ERR_TYPE_MASK GENMASK(28, 26)
#define ERR_TYPE_SHIFT 26
#define BIT_ERR 0
#define STUFF_ERR 1
#define FORM_ERR 2
#define ACK_ERR 3
#define CRC_ERR 4
#define ERR_DIR_RX BIT(25)
#define ERR_LOC_MASK GENMASK(15, 0)
/* Nominal Bit Timing & Prescaler Register (NBTP) */
#define NBTP_MODE_3_SAMPLES BIT(31)
#define NBTP_NSJW_SHIFT 24
#define NBTP_NSJW_MASK (0x7f << NBTP_NSJW_SHIFT)
#define NBTP_NBRP_SHIFT 16
#define NBTP_NBRP_MASK (0xff << NBTP_NBRP_SHIFT)
#define NBTP_NTSEG2_SHIFT 8
#define NBTP_NTSEG2_MASK (0x7f << NBTP_NTSEG2_SHIFT)
#define NBTP_NTSEG1_SHIFT 0
#define NBTP_NTSEG1_MASK (0x7f << NBTP_NTSEG1_SHIFT)
/* Data Bit Timing & Prescaler Register (DBTP) */
#define DBTP_MODE_3_SAMPLES BIT(21)
#define DBTP_DSJW_SHIFT 17
#define DBTP_DSJW_MASK (0xf << DBTP_DSJW_SHIFT)
#define DBTP_DBRP_SHIFT 9
#define DBTP_DBRP_MASK (0xff << DBTP_DBRP_SHIFT)
#define DBTP_DTSEG2_SHIFT 5
#define DBTP_DTSEG2_MASK (0xf << DBTP_DTSEG2_SHIFT)
#define DBTP_DTSEG1_SHIFT 0
#define DBTP_DTSEG1_MASK (0x1f << DBTP_DTSEG1_SHIFT)
/* Transmitter Delay Compensation Register (TDCR) */
#define TDCR_TDCO_SHIFT 1
#define TDCR_TDCO_MASK (0x3f << TDCR_TDCO_SHIFT)
#define TDCR_TDC_ENABLE BIT(0)
#define TX_FD_ENABLE BIT(5)
#define TX_FD_BRS_ENABLE BIT(4)
#define FIFO_ENABLE BIT(0)
#define RX_FIFO_CNT0_SHIFT 4
#define RX_FIFO_CNT0_MASK (0x7 << RX_FIFO_CNT0_SHIFT)
#define RX_FIFO_CNT1_SHIFT 5
#define RX_FIFO_CNT1_MASK (0x7 << RX_FIFO_CNT1_SHIFT)
#define FORMAT_SHIFT 7
#define FORMAT_MASK (0x1 << FORMAT_SHIFT)
#define RTR_SHIFT 6
#define RTR_MASK (0x1 << RTR_SHIFT)
#define FDF_SHIFT 5
#define FDF_MASK (0x1 << FDF_SHIFT)
#define BRS_SHIFT 4
#define BRS_MASK (0x1 << BRS_SHIFT)
#define DLC_SHIFT 0
#define DLC_MASK (0xF << DLC_SHIFT)
#define CAN_RF_SIZE 0x48
#define CAN_TEF_SIZE 0x8
#define CAN_TXEFRD_OFFSET(n) (CAN_TXEFRD + CAN_TEF_SIZE * (n))
#define CAN_RXFRD_OFFSET(n) (CAN_RXFRD + CAN_RF_SIZE * (n))
#define CAN_RX_FILTER_MASK 0x1fffffff
#define NOACK_ERR_FLAG 0xc200800
#define CAN_BUSOFF_FLAG 0x20
#define DRV_NAME "rockchip_canfd"
/* rockchip_canfd private data structure */
struct rockchip_canfd {
struct can_priv can;
struct device *dev;
struct napi_struct napi;
struct clk_bulk_data *clks;
int num_clks;
struct reset_control *reset;
void __iomem *base;
u32 irqstatus;
unsigned long mode;
int rx_fifo_shift;
u32 rx_fifo_mask;
bool txtorx;
u32 tx_invalid[4];
struct delayed_work tx_err_work;
u32 noack_cnt;
u32 delay_time_ms;
};
static inline u32 rockchip_canfd_read(const struct rockchip_canfd *priv,
enum rockchip_canfd_reg reg)
{
return readl(priv->base + reg);
}
static inline void rockchip_canfd_write(const struct rockchip_canfd *priv,
enum rockchip_canfd_reg reg, u32 val)
{
writel(val, priv->base + reg);
}
static const struct can_bittiming_const rockchip_canfd_bittiming_const = {
.name = DRV_NAME,
.tseg1_min = 1,
.tseg1_max = 128,
.tseg2_min = 1,
.tseg2_max = 128,
.sjw_max = 128,
.brp_min = 1,
.brp_max = 256,
.brp_inc = 2,
};
static const struct can_bittiming_const rockchip_canfd_data_bittiming_const = {
.name = DRV_NAME,
.tseg1_min = 1,
.tseg1_max = 32,
.tseg2_min = 1,
.tseg2_max = 16,
.sjw_max = 16,
.brp_min = 1,
.brp_max = 256,
.brp_inc = 2,
};
static int set_reset_mode(struct net_device *ndev)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
reset_control_assert(rcan->reset);
udelay(2);
reset_control_deassert(rcan->reset);
rockchip_canfd_write(rcan, CAN_MODE, 0);
netdev_dbg(ndev, "%s MODE=0x%08x\n", __func__,
rockchip_canfd_read(rcan, CAN_MODE));
return 0;
}
static int set_normal_mode(struct net_device *ndev)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
u32 val;
val = rockchip_canfd_read(rcan, CAN_MODE);
val |= WORK_MODE;
rockchip_canfd_write(rcan, CAN_MODE, val);
netdev_dbg(ndev, "%s MODE=0x%08x\n", __func__,
rockchip_canfd_read(rcan, CAN_MODE));
return 0;
}
/* bittiming is called in reset_mode only */
static int rockchip_canfd_set_bittiming(struct net_device *ndev)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
const struct can_bittiming *bt = &rcan->can.bittiming;
const struct can_bittiming *dbt = &rcan->can.data_bittiming;
u16 brp, sjw, tseg1, tseg2;
u32 reg_btp;
brp = (bt->brp >> 1) - 1;
sjw = bt->sjw - 1;
tseg1 = bt->prop_seg + bt->phase_seg1 - 1;
tseg2 = bt->phase_seg2 - 1;
reg_btp = (brp << NBTP_NBRP_SHIFT) | (sjw << NBTP_NSJW_SHIFT) |
(tseg1 << NBTP_NTSEG1_SHIFT) |
(tseg2 << NBTP_NTSEG2_SHIFT);
if (rcan->can.ctrlmode & CAN_CTRLMODE_3_SAMPLES)
reg_btp |= NBTP_MODE_3_SAMPLES;
rockchip_canfd_write(rcan, CAN_NBTP, reg_btp);
if (rcan->can.ctrlmode & CAN_CTRLMODE_FD) {
reg_btp = 0;
brp = (dbt->brp >> 1) - 1;
sjw = dbt->sjw - 1;
tseg1 = dbt->prop_seg + dbt->phase_seg1 - 1;
tseg2 = dbt->phase_seg2 - 1;
if (dbt->bitrate > 2200000) {
u32 tdco;
/* Equation based on Bosch's ROCKCHIP_CAN User Manual's
* Transmitter Delay Compensation Section
*/
tdco = (rcan->can.clock.freq / dbt->bitrate) * 2 / 3;
/* Max valid TDCO value is 63 */
if (tdco > 63)
tdco = 63;
rockchip_canfd_write(rcan, CAN_TDCR,
(tdco << TDCR_TDCO_SHIFT) |
TDCR_TDC_ENABLE);
}
reg_btp |= (brp << DBTP_DBRP_SHIFT) |
(sjw << DBTP_DSJW_SHIFT) |
(tseg1 << DBTP_DTSEG1_SHIFT) |
(tseg2 << DBTP_DTSEG2_SHIFT);
if (rcan->can.ctrlmode & CAN_CTRLMODE_3_SAMPLES)
reg_btp |= DBTP_MODE_3_SAMPLES;
rockchip_canfd_write(rcan, CAN_DBTP, reg_btp);
}
if (bt->bitrate > 200000)
rcan->delay_time_ms = 1;
else if (bt->bitrate > 50000)
rcan->delay_time_ms = 5;
else
rcan->delay_time_ms = 20;
netdev_dbg(ndev, "%s NBTP=0x%08x, DBTP=0x%08x, TDCR=0x%08x\n", __func__,
rockchip_canfd_read(rcan, CAN_NBTP),
rockchip_canfd_read(rcan, CAN_DBTP),
rockchip_canfd_read(rcan, CAN_TDCR));
return 0;
}
static int rockchip_canfd_get_berr_counter(const struct net_device *ndev,
struct can_berr_counter *bec)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
int err;
err = pm_runtime_get_sync(rcan->dev);
if (err < 0) {
netdev_err(ndev, "%s: pm_runtime_get failed(%d)\n",
__func__, err);
return err;
}
bec->rxerr = rockchip_canfd_read(rcan, CAN_RX_ERR_CNT);
bec->txerr = rockchip_canfd_read(rcan, CAN_TX_ERR_CNT);
pm_runtime_put(rcan->dev);
netdev_dbg(ndev, "%s RX_ERR_CNT=0x%08x, TX_ERR_CNT=0x%08x\n", __func__,
rockchip_canfd_read(rcan, CAN_RX_ERR_CNT),
rockchip_canfd_read(rcan, CAN_TX_ERR_CNT));
return 0;
}
static int rockchip_canfd_start(struct net_device *ndev)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
u32 val;
/* we need to enter the reset mode */
set_reset_mode(ndev);
rockchip_canfd_write(rcan, CAN_INT_MASK, 0);
/* RECEIVING FILTER, accept all */
rockchip_canfd_write(rcan, CAN_IDCODE, 0);
rockchip_canfd_write(rcan, CAN_IDMASK, CAN_RX_FILTER_MASK);
rockchip_canfd_write(rcan, CAN_IDCODE0, 0);
rockchip_canfd_write(rcan, CAN_IDMASK0, CAN_RX_FILTER_MASK);
rockchip_canfd_write(rcan, CAN_IDCODE1, 0);
rockchip_canfd_write(rcan, CAN_IDMASK1, CAN_RX_FILTER_MASK);
rockchip_canfd_write(rcan, CAN_IDCODE2, 0);
rockchip_canfd_write(rcan, CAN_IDMASK2, CAN_RX_FILTER_MASK);
rockchip_canfd_write(rcan, CAN_IDCODE3, 0);
rockchip_canfd_write(rcan, CAN_IDMASK3, CAN_RX_FILTER_MASK);
rockchip_canfd_write(rcan, CAN_IDCODE4, 0);
rockchip_canfd_write(rcan, CAN_IDMASK4, CAN_RX_FILTER_MASK);
/* set mode */
val = rockchip_canfd_read(rcan, CAN_MODE);
/* rx fifo enable */
rockchip_canfd_write(rcan, CAN_RXFC,
rockchip_canfd_read(rcan, CAN_RXFC) | FIFO_ENABLE);
/* Mode */
val |= MODE_FDOE;
/* Loopback Mode */
if (rcan->can.ctrlmode & CAN_CTRLMODE_LOOPBACK)
val |= MODE_SELF_TEST | MODE_LBACK;
/* Listen-only mode */
if (rcan->can.ctrlmode & CAN_CTRLMODE_LISTENONLY)
val |= MODE_SILENT;
rockchip_canfd_write(rcan, CAN_MODE, val);
rockchip_canfd_set_bittiming(ndev);
set_normal_mode(ndev);
rcan->can.state = CAN_STATE_ERROR_ACTIVE;
netdev_dbg(ndev, "%s MODE=0x%08x, INT_MASK=0x%08x\n", __func__,
rockchip_canfd_read(rcan, CAN_MODE),
rockchip_canfd_read(rcan, CAN_INT_MASK));
return 0;
}
static int rockchip_canfd_stop(struct net_device *ndev)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
rcan->can.state = CAN_STATE_STOPPED;
/* we need to enter reset mode */
set_reset_mode(ndev);
/* disable all interrupts */
rockchip_canfd_write(rcan, CAN_INT_MASK, 0xffff);
netdev_dbg(ndev, "%s MODE=0x%08x, INT_MASK=0x%08x\n", __func__,
rockchip_canfd_read(rcan, CAN_MODE),
rockchip_canfd_read(rcan, CAN_INT_MASK));
return 0;
}
static int rockchip_canfd_set_mode(struct net_device *ndev,
enum can_mode mode)
{
int err;
switch (mode) {
case CAN_MODE_START:
err = rockchip_canfd_start(ndev);
if (err) {
netdev_err(ndev, "starting CAN controller failed!\n");
return err;
}
if (netif_queue_stopped(ndev))
netif_wake_queue(ndev);
break;
default:
return -EOPNOTSUPP;
}
return 0;
}
static void rockchip_canfd_tx_err_delay_work(struct work_struct *work)
{
struct rockchip_canfd *rcan =
container_of(work, struct rockchip_canfd, tx_err_work.work);
struct net_device *ndev = dev_get_drvdata(rcan->dev);
rockchip_canfd_write(rcan, CAN_MODE,
rockchip_canfd_read(rcan, CAN_MODE) | MODE_SPACE_RX);
rockchip_canfd_write(rcan, CAN_CMD, CAN_TX0_REQ);
rockchip_canfd_write(rcan, CAN_MODE,
rockchip_canfd_read(rcan, CAN_MODE) & (~MODE_SPACE_RX));
rcan->noack_cnt++;
schedule_delayed_work(&rcan->tx_err_work, msecs_to_jiffies(rcan->delay_time_ms));
if (rcan->noack_cnt > 50) {
cancel_delayed_work(&rcan->tx_err_work);
rockchip_canfd_write(rcan, CAN_INT_MASK, 0xffff);
can_bus_off(ndev);
rcan->noack_cnt = 0;
}
}
/* transmit a CAN message
* message layout in the sk_buff should be like this:
* xx xx xx xx ff ll 00 11 22 33 44 55 66 77
* [ can_id ] [flags] [len] [can data (up to 8 bytes]
*/
static int rockchip_canfd_start_xmit(struct sk_buff *skb,
struct net_device *ndev)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
struct canfd_frame *cf = (struct canfd_frame *)skb->data;
u32 id, dlc;
u32 cmd = CAN_TX0_REQ;
int i;
unsigned long flags;
if (can_dropped_invalid_skb(ndev, skb))
return NETDEV_TX_OK;
netif_stop_queue(ndev);
if (rockchip_canfd_read(rcan, CAN_CMD) & CAN_TX0_REQ)
cmd = CAN_TX1_REQ;
/* Watch carefully on the bit sequence */
if (cf->can_id & CAN_EFF_FLAG) {
/* Extended CAN ID format */
id = cf->can_id & CAN_EFF_MASK;
dlc = can_len2dlc(cf->len) & DLC_MASK;
dlc |= FORMAT_MASK;
/* Extended frames remote TX request */
if (cf->can_id & CAN_RTR_FLAG)
dlc |= RTR_MASK;
} else {
/* Standard CAN ID format */
id = cf->can_id & CAN_SFF_MASK;
dlc = can_len2dlc(cf->len) & DLC_MASK;
/* Standard frames remote TX request */
if (cf->can_id & CAN_RTR_FLAG)
dlc |= RTR_MASK;
}
if ((rcan->can.ctrlmode & CAN_CTRLMODE_FD) && can_is_canfd_skb(skb)) {
dlc |= TX_FD_ENABLE;
if (cf->flags & CANFD_BRS)
dlc |= TX_FD_BRS_ENABLE;
}
if (rcan->txtorx && rcan->mode <= ROCKCHIP_RK3568_CAN_MODE && cf->can_id & CAN_EFF_FLAG)
rockchip_canfd_write(rcan, CAN_MODE,
rockchip_canfd_read(rcan, CAN_MODE) | MODE_RXSTX);
else
rockchip_canfd_write(rcan, CAN_MODE,
rockchip_canfd_read(rcan, CAN_MODE) & (~MODE_RXSTX));
if (!rcan->txtorx && rcan->mode <= ROCKCHIP_RK3568_CAN_MODE && cf->can_id & CAN_EFF_FLAG) {
/* Two frames are sent consecutively.
* Before the first frame is tx finished,
* the register of the second frame is configured.
* Don't be interrupted in the middle.
*/
local_irq_save(flags);
rockchip_canfd_write(rcan, CAN_TXID, rcan->tx_invalid[1]);
rockchip_canfd_write(rcan, CAN_TXFIC, rcan->tx_invalid[0]);
rockchip_canfd_write(rcan, CAN_TXDAT0, rcan->tx_invalid[2]);
rockchip_canfd_write(rcan, CAN_TXDAT1, rcan->tx_invalid[3]);
rockchip_canfd_write(rcan, CAN_CMD, CAN_TX0_REQ);
rockchip_canfd_write(rcan, CAN_TXID, id);
rockchip_canfd_write(rcan, CAN_TXFIC, dlc);
for (i = 0; i < cf->len; i += 4)
rockchip_canfd_write(rcan, CAN_TXDAT0 + i,
*(u32 *)(cf->data + i));
can_put_echo_skb(skb, ndev, 0);
rockchip_canfd_write(rcan, CAN_CMD, CAN_TX1_REQ);
local_irq_restore(flags);
return NETDEV_TX_OK;
}
rockchip_canfd_write(rcan, CAN_TXID, id);
rockchip_canfd_write(rcan, CAN_TXFIC, dlc);
for (i = 0; i < cf->len; i += 4)
rockchip_canfd_write(rcan, CAN_TXDAT0 + i,
*(u32 *)(cf->data + i));
can_put_echo_skb(skb, ndev, 0);
rockchip_canfd_write(rcan, CAN_MODE,
rockchip_canfd_read(rcan, CAN_MODE) | MODE_SPACE_RX);
rockchip_canfd_write(rcan, CAN_CMD, cmd);
rockchip_canfd_write(rcan, CAN_MODE,
rockchip_canfd_read(rcan, CAN_MODE) & (~MODE_SPACE_RX));
schedule_delayed_work(&rcan->tx_err_work, msecs_to_jiffies(rcan->delay_time_ms));
return NETDEV_TX_OK;
}
static int rockchip_canfd_rx(struct net_device *ndev)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
struct net_device_stats *stats = &ndev->stats;
struct canfd_frame *cf;
struct sk_buff *skb;
u32 id_rockchip_canfd, dlc;
int i = 0;
u32 __maybe_unused ts, ret;
u32 data[16];
dlc = rockchip_canfd_read(rcan, CAN_RXFRD);
id_rockchip_canfd = rockchip_canfd_read(rcan, CAN_RXFRD);
ts = rockchip_canfd_read(rcan, CAN_RXFRD);
for (i = 0; i < ARRAY_SIZE(data); i++)
data[i] = rockchip_canfd_read(rcan, CAN_RXFRD);
if (rcan->mode <= ROCKCHIP_RK3568_CAN_MODE) {
/* may be an empty frame */
if (!dlc && !id_rockchip_canfd)
return 1;
if (rcan->txtorx) {
if (rockchip_canfd_read(rcan, CAN_TX_CHECK_FIC) & FORMAT_MASK) {
ret = rockchip_canfd_read(rcan, CAN_TXID) & CAN_SFF_MASK;
if ((id_rockchip_canfd == ret) && !(dlc & FORMAT_MASK))
rockchip_canfd_write(rcan, CAN_TX_CHECK_FIC,
ts | CAN_TX0_REQ);
return 1;
}
}
}
/* create zero'ed CAN frame buffer */
if (dlc & FDF_MASK)
skb = alloc_canfd_skb(ndev, &cf);
else
skb = alloc_can_skb(ndev, (struct can_frame **)&cf);
if (!skb) {
stats->rx_dropped++;
return 1;
}
/* Change CAN data length format to socketCAN data format */
if (dlc & FDF_MASK)
cf->len = can_dlc2len(dlc & DLC_MASK);
else
cf->len = get_can_dlc(dlc & DLC_MASK);
/* Change CAN ID format to socketCAN ID format */
if (dlc & FORMAT_MASK) {
/* The received frame is an Extended format frame */
cf->can_id = id_rockchip_canfd;
cf->can_id |= CAN_EFF_FLAG;
if (dlc & RTR_MASK)
cf->can_id |= CAN_RTR_FLAG;
} else {
/* The received frame is a standard format frame */
cf->can_id = id_rockchip_canfd;
if (dlc & RTR_MASK)
cf->can_id |= CAN_RTR_FLAG;
}
if (dlc & BRS_MASK)
cf->flags |= CANFD_BRS;
if (!(cf->can_id & CAN_RTR_FLAG)) {
/* Change CAN data format to socketCAN data format */
for (i = 0; i < cf->len; i += 4)
*(u32 *)(cf->data + i) = data[i / 4];
}
stats->rx_packets++;
stats->rx_bytes += cf->len;
netif_rx(skb);
can_led_event(ndev, CAN_LED_EVENT_RX);
return 1;
}
static int rockchip_canfd_get_rx_fifo_cnt(struct net_device *ndev)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
int quota = 0;
if (read_poll_timeout_atomic(rockchip_canfd_read, quota,
(quota & rcan->rx_fifo_mask) >> rcan->rx_fifo_shift,
0, 500000, false, rcan, CAN_RXFC))
netdev_dbg(ndev, "Warning: get fifo cnt failed\n");
quota = (quota & rcan->rx_fifo_mask) >> rcan->rx_fifo_shift;
return quota;
}
/* rockchip_canfd_rx_poll - Poll routine for rx packets (NAPI)
* @napi: napi structure pointer
* @quota: Max number of rx packets to be processed.
*
* This is the poll routine for rx part.
* It will process the packets maximux quota value.
*
* Return: number of packets received
*/
static int rockchip_canfd_rx_poll(struct napi_struct *napi, int quota)
{
struct net_device *ndev = napi->dev;
struct rockchip_canfd *rcan = netdev_priv(ndev);
int work_done = 0;
quota = rockchip_canfd_get_rx_fifo_cnt(ndev);
if (quota > 6)
quota = 6;
if (quota) {
while (work_done < quota)
work_done += rockchip_canfd_rx(ndev);
}
if (work_done)
can_led_event(ndev, CAN_LED_EVENT_RX);
if (work_done < 6) {
napi_complete_done(napi, work_done);
rockchip_canfd_write(rcan, CAN_INT_MASK, 0);
}
return work_done;
}
static void rockchip_canfd_tx_retry(struct net_device *ndev, u32 isr)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
u32 err_code = rockchip_canfd_read(rcan, CAN_ERR_CODE);
u32 data[4], mode;
int i = 0;
if ((isr & TX_LOSTARB_INT) || ((!(err_code & 0x2000000)) && (err_code & 0x1ff0000))) {
mode = rockchip_canfd_read(rcan, CAN_MODE);
for (i = 0; i < ARRAY_SIZE(data); i++)
data[i] = rockchip_canfd_read(rcan, CAN_TXFIC + i * 4);
rockchip_canfd_write(rcan, CAN_INT_MASK, 0xffff);
rockchip_canfd_start(ndev);
rockchip_canfd_write(rcan, CAN_MODE, mode);
for (i = 0; i < ARRAY_SIZE(data); i++)
rockchip_canfd_write(rcan, CAN_TXFIC + i * 4, data[i]);
}
}
static int rockchip_canfd_err(struct net_device *ndev, u32 isr)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
struct net_device_stats *stats = &ndev->stats;
struct can_frame *cf;
struct sk_buff *skb;
unsigned int rxerr, txerr;
u32 sta_reg;
skb = alloc_can_err_skb(ndev, &cf);
rxerr = rockchip_canfd_read(rcan, CAN_RX_ERR_CNT);
txerr = rockchip_canfd_read(rcan, CAN_TX_ERR_CNT);
sta_reg = rockchip_canfd_read(rcan, CAN_STATE);
if (skb) {
cf->data[6] = txerr;
cf->data[7] = rxerr;
}
if (isr & BUS_OFF_INT) {
rcan->can.state = CAN_STATE_BUS_OFF;
rcan->can.can_stats.bus_off++;
cf->can_id |= CAN_ERR_BUSOFF;
} else if (isr & ERR_WARN_INT) {
rcan->can.can_stats.error_warning++;
rcan->can.state = CAN_STATE_ERROR_WARNING;
/* error warning state */
if (likely(skb)) {
cf->can_id |= CAN_ERR_CRTL;
cf->data[1] = (txerr > rxerr) ?
CAN_ERR_CRTL_TX_WARNING :
CAN_ERR_CRTL_RX_WARNING;
cf->data[6] = txerr;
cf->data[7] = rxerr;
}
} else if (isr & PASSIVE_ERR_INT) {
rcan->can.can_stats.error_passive++;
rcan->can.state = CAN_STATE_ERROR_PASSIVE;
/* error passive state */
cf->can_id |= CAN_ERR_CRTL;
cf->data[1] = (txerr > rxerr) ?
CAN_ERR_CRTL_TX_WARNING :
CAN_ERR_CRTL_RX_WARNING;
cf->data[6] = txerr;
cf->data[7] = rxerr;
}
if (rcan->can.state >= CAN_STATE_BUS_OFF ||
((sta_reg & CAN_BUSOFF_FLAG) == CAN_BUSOFF_FLAG)) {
cancel_delayed_work(&rcan->tx_err_work);
rockchip_canfd_write(rcan, CAN_INT_MASK, 0xffff);
can_bus_off(ndev);
}
stats->rx_packets++;
stats->rx_bytes += cf->can_dlc;
netif_rx(skb);
return 0;
}
static irqreturn_t rockchip_canfd_interrupt(int irq, void *dev_id)
{
struct net_device *ndev = (struct net_device *)dev_id;
struct rockchip_canfd *rcan = netdev_priv(ndev);
struct net_device_stats *stats = &ndev->stats;
u32 err_int = ERR_WARN_INT | RX_BUF_OV_INT | PASSIVE_ERR_INT |
BUS_ERR_INT | BUS_OFF_INT;
u32 isr;
u32 dlc = 0;
u32 quota, work_done = 0;
isr = rockchip_canfd_read(rcan, CAN_INT);
if (isr & TX_FINISH_INT) {
cancel_delayed_work(&rcan->tx_err_work);
dlc = rockchip_canfd_read(rcan, CAN_TXFIC);
/* transmission complete interrupt */
if (dlc & FDF_MASK)
stats->tx_bytes += can_dlc2len(dlc & DLC_MASK);
else
stats->tx_bytes += (dlc & DLC_MASK);
stats->tx_packets++;
if (rcan->txtorx && rcan->mode <= ROCKCHIP_RK3568_CAN_MODE && dlc & FORMAT_MASK) {
rockchip_canfd_write(rcan, CAN_TX_CHECK_FIC, FORMAT_MASK);
quota = rockchip_canfd_get_rx_fifo_cnt(ndev);
if (quota) {
while (work_done < quota)
work_done += rockchip_canfd_rx(ndev);
}
if (rockchip_canfd_read(rcan, CAN_TX_CHECK_FIC) & CAN_TX0_REQ)
rockchip_canfd_write(rcan, CAN_CMD, CAN_TX1_REQ);
rockchip_canfd_write(rcan, CAN_TX_CHECK_FIC, 0);
}
if (read_poll_timeout_atomic(rockchip_canfd_read, quota,
!(quota & 0x3),
0, 5000000, false, rcan, CAN_CMD))
netdev_err(ndev, "Warning: wait tx req timeout!\n");
rockchip_canfd_write(rcan, CAN_CMD, 0);
can_get_echo_skb(ndev, 0);
netif_wake_queue(ndev);
can_led_event(ndev, CAN_LED_EVENT_TX);
rcan->noack_cnt = 0;
}
if ((isr & RX_FINISH_INT) || (isr & RX_FIFO_OV_INT) || (isr & RX_FIFO_FULL_INT)) {
if (rcan->mode == ROCKCHIP_RK3568_CAN_MODE_V2) {
//rockchip_canfd_write(rcan, CAN_INT_MASK, 0x1);
work_done = 0;
quota = (rockchip_canfd_read(rcan, CAN_RXFC) &
rcan->rx_fifo_mask) >>
rcan->rx_fifo_shift;
if (quota) {
while (work_done < quota)
work_done += rockchip_canfd_rx(ndev);
}
} else {
work_done = 0;
quota = (rockchip_canfd_read(rcan, CAN_RXFC) &
rcan->rx_fifo_mask) >>
rcan->rx_fifo_shift;
if (quota) {
while (work_done < quota)
work_done += rockchip_canfd_rx(ndev);
}
}
}
if (isr & err_int) {
/* error interrupt */
if (rockchip_canfd_err(ndev, isr))
netdev_err(ndev, "can't allocate buffer - clearing pending interrupts\n");
}
rockchip_canfd_tx_retry(ndev, isr);
rockchip_canfd_write(rcan, CAN_INT, isr);
return IRQ_HANDLED;
}
static int rockchip_canfd_open(struct net_device *ndev)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
int err;
/* common open */
err = open_candev(ndev);
if (err)
return err;
err = pm_runtime_get_sync(rcan->dev);
if (err < 0) {
netdev_err(ndev, "%s: pm_runtime_get failed(%d)\n",
__func__, err);
goto exit;
}
err = rockchip_canfd_start(ndev);
if (err) {
netdev_err(ndev, "could not start CAN peripheral\n");
goto exit_can_start;
}
can_led_event(ndev, CAN_LED_EVENT_OPEN);
// if (rcan->mode == ROCKCHIP_RK3568_CAN_MODE_V2)
// napi_enable(&rcan->napi);
netif_start_queue(ndev);
netdev_dbg(ndev, "%s\n", __func__);
return 0;
exit_can_start:
pm_runtime_put(rcan->dev);
exit:
close_candev(ndev);
return err;
}
static int rockchip_canfd_close(struct net_device *ndev)
{
struct rockchip_canfd *rcan = netdev_priv(ndev);
netif_stop_queue(ndev);
// if (rcan->mode == ROCKCHIP_RK3568_CAN_MODE_V2)
// napi_disable(&rcan->napi);
rockchip_canfd_stop(ndev);
close_candev(ndev);
can_led_event(ndev, CAN_LED_EVENT_STOP);
pm_runtime_put(rcan->dev);
cancel_delayed_work_sync(&rcan->tx_err_work);
netdev_dbg(ndev, "%s\n", __func__);
return 0;
}
static const struct net_device_ops rockchip_canfd_netdev_ops = {
.ndo_open = rockchip_canfd_open,
.ndo_stop = rockchip_canfd_close,
.ndo_start_xmit = rockchip_canfd_start_xmit,
.ndo_change_mtu = can_change_mtu,
};
/**
* rockchip_canfd_suspend - Suspend method for the driver
* @dev: Address of the device structure
*
* Put the driver into low power mode.
* Return: 0 on success and failure value on error
*/
static int __maybe_unused rockchip_canfd_suspend(struct device *dev)
{
struct net_device *ndev = dev_get_drvdata(dev);
if (netif_running(ndev)) {
netif_stop_queue(ndev);
netif_device_detach(ndev);
rockchip_canfd_stop(ndev);
}
return pm_runtime_force_suspend(dev);
}
/**
* rockchip_canfd_resume - Resume from suspend
* @dev: Address of the device structure
*
* Resume operation after suspend.
* Return: 0 on success and failure value on error
*/
static int __maybe_unused rockchip_canfd_resume(struct device *dev)
{
struct net_device *ndev = dev_get_drvdata(dev);
int ret;
ret = pm_runtime_force_resume(dev);
if (ret) {
dev_err(dev, "pm_runtime_force_resume failed on resume\n");
return ret;
}
if (netif_running(ndev)) {
ret = rockchip_canfd_start(ndev);
if (ret) {
dev_err(dev, "rockchip_canfd_chip_start failed on resume\n");
return ret;
}
netif_device_attach(ndev);
netif_start_queue(ndev);
}
return 0;
}
/**
* rockchip_canfd_runtime_suspend - Runtime suspend method for the driver
* @dev: Address of the device structure
*
* Put the driver into low power mode.
* Return: 0 always
*/
static int __maybe_unused rockchip_canfd_runtime_suspend(struct device *dev)
{
struct net_device *ndev = dev_get_drvdata(dev);
struct rockchip_canfd *rcan = netdev_priv(ndev);
clk_bulk_disable_unprepare(rcan->num_clks, rcan->clks);
return 0;
}
/**
* rockchip_canfd_runtime_resume - Runtime resume from suspend
* @dev: Address of the device structure
*
* Resume operation after suspend.
* Return: 0 on success and failure value on error
*/
static int __maybe_unused rockchip_canfd_runtime_resume(struct device *dev)
{
struct net_device *ndev = dev_get_drvdata(dev);
struct rockchip_canfd *rcan = netdev_priv(ndev);
int ret;
ret = clk_bulk_prepare_enable(rcan->num_clks, rcan->clks);
if (ret) {
dev_err(dev, "Cannot enable clock.\n");
return ret;
}
return 0;
}
static const struct dev_pm_ops rockchip_canfd_dev_pm_ops = {
SET_SYSTEM_SLEEP_PM_OPS(rockchip_canfd_suspend, rockchip_canfd_resume)
SET_RUNTIME_PM_OPS(rockchip_canfd_runtime_suspend,
rockchip_canfd_runtime_resume, NULL)
};
static const struct of_device_id rockchip_canfd_of_match[] = {
{
.compatible = "rockchip,canfd-1.0",
.data = (void *)ROCKCHIP_CANFD_MODE
},
{
.compatible = "rockchip,can-2.0",
.data = (void *)ROCKCHIP_CAN_MODE
},
{
.compatible = "rockchip,rk3568-can-2.0",
.data = (void *)ROCKCHIP_RK3568_CAN_MODE
},
{},
};
MODULE_DEVICE_TABLE(of, rockchip_canfd_of_match);
static int rockchip_canfd_probe(struct platform_device *pdev)
{
struct net_device *ndev;
struct rockchip_canfd *rcan;
struct resource *res;
void __iomem *addr;
int err, irq;
irq = platform_get_irq(pdev, 0);
if (irq < 0) {
dev_err(&pdev->dev, "could not get a valid irq\n");
return -ENODEV;
}
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
addr = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(addr))
return -EBUSY;
ndev = alloc_candev(sizeof(struct rockchip_canfd), 1);
if (!ndev) {
dev_err(&pdev->dev, "could not allocate memory for CANFD device\n");
return -ENOMEM;
}
rcan = netdev_priv(ndev);
/* register interrupt handler */
err = devm_request_irq(&pdev->dev, irq, rockchip_canfd_interrupt,
0, ndev->name, ndev);
if (err) {
dev_err(&pdev->dev, "request_irq err: %d\n", err);
return err;
}
rcan->reset = devm_reset_control_array_get(&pdev->dev, false, false);
if (IS_ERR(rcan->reset)) {
if (PTR_ERR(rcan->reset) != -EPROBE_DEFER)
dev_err(&pdev->dev, "failed to get canfd reset lines\n");
return PTR_ERR(rcan->reset);
}
rcan->num_clks = devm_clk_bulk_get_all(&pdev->dev, &rcan->clks);
if (rcan->num_clks < 1)
return -ENODEV;
rcan->mode = (unsigned long)of_device_get_match_data(&pdev->dev);
if ((cpu_is_rk3566() || cpu_is_rk3568()) && (rockchip_get_cpu_version() == 3))
rcan->mode = ROCKCHIP_RK3568_CAN_MODE_V2;
rcan->base = addr;
rcan->can.clock.freq = clk_get_rate(rcan->clks[0].clk);
rcan->dev = &pdev->dev;
rcan->can.state = CAN_STATE_STOPPED;
switch (rcan->mode) {
case ROCKCHIP_CANFD_MODE:
rcan->can.bittiming_const = &rockchip_canfd_bittiming_const;
rcan->can.data_bittiming_const = &rockchip_canfd_data_bittiming_const;
rcan->can.do_set_mode = rockchip_canfd_set_mode;
rcan->can.do_get_berr_counter = rockchip_canfd_get_berr_counter;
rcan->can.do_set_bittiming = rockchip_canfd_set_bittiming;
rcan->can.do_set_data_bittiming = rockchip_canfd_set_bittiming;
rcan->can.ctrlmode = CAN_CTRLMODE_FD;
/* IFI CANFD can do both Bosch FD and ISO FD */
rcan->can.ctrlmode_supported = CAN_CTRLMODE_LOOPBACK |
CAN_CTRLMODE_FD;
rcan->rx_fifo_shift = RX_FIFO_CNT0_SHIFT;
rcan->rx_fifo_mask = RX_FIFO_CNT0_MASK;
break;
case ROCKCHIP_CAN_MODE:
case ROCKCHIP_RK3568_CAN_MODE:
case ROCKCHIP_RK3568_CAN_MODE_V2:
rcan->can.bittiming_const = &rockchip_canfd_bittiming_const;
rcan->can.do_set_mode = rockchip_canfd_set_mode;
rcan->can.do_get_berr_counter = rockchip_canfd_get_berr_counter;
rcan->can.ctrlmode_supported = CAN_CTRLMODE_BERR_REPORTING |
CAN_CTRLMODE_LISTENONLY |
CAN_CTRLMODE_LOOPBACK |
CAN_CTRLMODE_3_SAMPLES;
rcan->rx_fifo_shift = RX_FIFO_CNT0_SHIFT;
rcan->rx_fifo_mask = RX_FIFO_CNT0_MASK;
break;
default:
return -EINVAL;
}
if (rcan->mode == ROCKCHIP_CAN_MODE) {
rcan->rx_fifo_shift = RX_FIFO_CNT1_SHIFT;
rcan->rx_fifo_mask = RX_FIFO_CNT1_MASK;
}
if (device_property_read_u32_array(&pdev->dev,
"rockchip,tx-invalid-info",
rcan->tx_invalid, 4))
rcan->txtorx = 1;
if (rcan->mode == ROCKCHIP_RK3568_CAN_MODE_V2) {
rcan->txtorx = 0;
//netif_napi_add(ndev, &rcan->napi, rockchip_canfd_rx_poll, 6);
}
ndev->netdev_ops = &rockchip_canfd_netdev_ops;
ndev->irq = irq;
ndev->flags |= IFF_ECHO;
rcan->can.restart_ms = 100;
rcan->noack_cnt = 0;
irq_set_affinity_hint(irq, get_cpu_mask(num_online_cpus() - 1));
INIT_DELAYED_WORK(&rcan->tx_err_work, rockchip_canfd_tx_err_delay_work);
platform_set_drvdata(pdev, ndev);
SET_NETDEV_DEV(ndev, &pdev->dev);
pm_runtime_enable(&pdev->dev);
err = pm_runtime_get_sync(&pdev->dev);
if (err < 0) {
dev_err(&pdev->dev, "%s: pm_runtime_get failed(%d)\n",
__func__, err);
goto err_pmdisable;
}
err = register_candev(ndev);
if (err) {
dev_err(&pdev->dev, "registering %s failed (err=%d)\n",
DRV_NAME, err);
goto err_disableclks;
}
devm_can_led_init(ndev);
return 0;
err_disableclks:
pm_runtime_put(&pdev->dev);
err_pmdisable:
pm_runtime_disable(&pdev->dev);
free_candev(ndev);
return err;
}
static int rockchip_canfd_remove(struct platform_device *pdev)
{
struct net_device *ndev = platform_get_drvdata(pdev);
// struct rockchip_canfd *rcan = netdev_priv(ndev);
unregister_netdev(ndev);
pm_runtime_disable(&pdev->dev);
// if (rcan->mode == ROCKCHIP_RK3568_CAN_MODE_V2)
// netif_napi_del(&rcan->napi);
free_candev(ndev);
return 0;
}
static struct platform_driver rockchip_canfd_driver = {
.driver = {
.name = DRV_NAME,
.pm = &rockchip_canfd_dev_pm_ops,
.of_match_table = rockchip_canfd_of_match,
},
.probe = rockchip_canfd_probe,
.remove = rockchip_canfd_remove,
};
module_platform_driver(rockchip_canfd_driver);
MODULE_AUTHOR("Elaine Zhang <zhangqing@rock-chips.com>");
MODULE_LICENSE("GPL");
MODULE_DESCRIPTION("Rockchip CANFD Drivers");

















 5013
5013

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











