OTSU算法是由日本学者OTSU于1979年提出的一种对图像进行二值化的高效算法。**重点内容**
-
- OTSU算法原理简介
对于一幅图像,设当前景与背景的分割阈值为t时,前景点占图像比例为w0,均值为u0,背景点占图像比例为w1,均值为u1。则整个图像的均值为u = w0*u0+w1*u1。建立目标函数g(t)=w0*(u0-u)^2+w1*(u1-u)^2,g(t)就是当分割阈值为t时的类间方差表达式。OTSU算法使得g(t)取得全局最大值,当g(t)为最大时所对应的t称为最佳阈值。OTSU算法又称为最大类间方差法。
最大类间方差法是由日本学者大津于1979年提出的,是一种自适应的阈值确定的方法,又叫大津法,简称OTSU。它是按图像的灰度特性,将图像分成背景和目标2部分。背景和目标之间的类间方差越大,说明构成图像的2部分的差别越大,当部分目标错分为背景或部分背景错分为目标都会导致2部分差别变小。因此,使类间方差最大的分割意味着错分概率最小 对于图像I(x,y),前景(即目标)和背景的分割阈值记作T,属于前景的像素点数占整幅图像的比例记为ω0,其平均灰度μ0;背景像素点数占整幅图像的比例为ω1,其平均灰度为μ1。图像的总平均灰度记为μ,类间方差记为g。假设图像的背景较暗,并且图像的大小为M×N,图像中像素的灰度值小于阈值T的像素个数记作N0,像素灰度大于阈值T的像素个数记作N1,则有:
ω0=N0/ M×N (1)
ω1=N1/ M×N (2)
N0+N1=M×N (3)
ω0+ω1=1 (4)
μ=ω0*μ0+ω1*μ1 (5)
g=ω0(μ0-μ)^2+ω1(μ1-μ)^2 (6)
将式(5)代入式(6),得到等价公式: g=ω0ω1(μ0-μ1)^2 (7)
采用遍历的方法得到使类间方差最大的阈值T,即为所求。
- 2.OTSU算法例程
#include <opencv2\opencv.hpp>
#include <iostream>
#include <string>
#include <assert.h>
using namespace cv;
using namespace std;
int otsu(IplImage *image)
{
assert(NULL != image);
int width = image->width;
int height = image->height;
int x = 0, y = 0;
int pixelCount[256];
float pixelPro[256];
int i, j, pixelSum = width * height, threshold = 0;
uchar* data = (uchar*)image->imageData;
for (i = 0; i < 256; i++)
{
pixelCount[i] = 0;
pixelPro[i] = 0;
}
for (i = y; i < height; i++)
{
for (j = x; j<width;j++)
pixelCount[data[i * image->widthStep + j]]++;
}
for (i = 0; i < 256; i++)
{
pixelPro[i] = (float)(pixelCount[i]) / (float)(pixelSum);
}
float w0, w1, u0tmp, u1tmp, u0, u1, u, deltaTmp, deltaMax = 0;
for (i = 0; i < 256; i++)
{
w0 = w1 = u0tmp = u1tmp = u0 = u1 = u = deltaTmp = 0;
for (j = 0; j < 256; j++)
{
if (j <= i)
{
w0 += pixelPro[j];
u0tmp += j * pixelPro[j];
}
else
{
w1 += pixelPro[j];
u1tmp += j * pixelPro[j];
}
}
u0 = u0tmp / w0;
u1 = u1tmp / w1;
u = u0tmp + u1tmp;
deltaTmp = w0 * (u0 - u)*(u0 - u) + w1 * (u1 - u)*(u1 - u);
if (deltaTmp > deltaMax)
{
deltaMax = deltaTmp;
threshold = i;
}
}
return threshold;
}
int main(int argc, char* argv[])
{
IplImage* srcImage = cvLoadImage("F:\\workplace\\opencv_training\\test2.png", 0);
assert(NULL != srcImage);
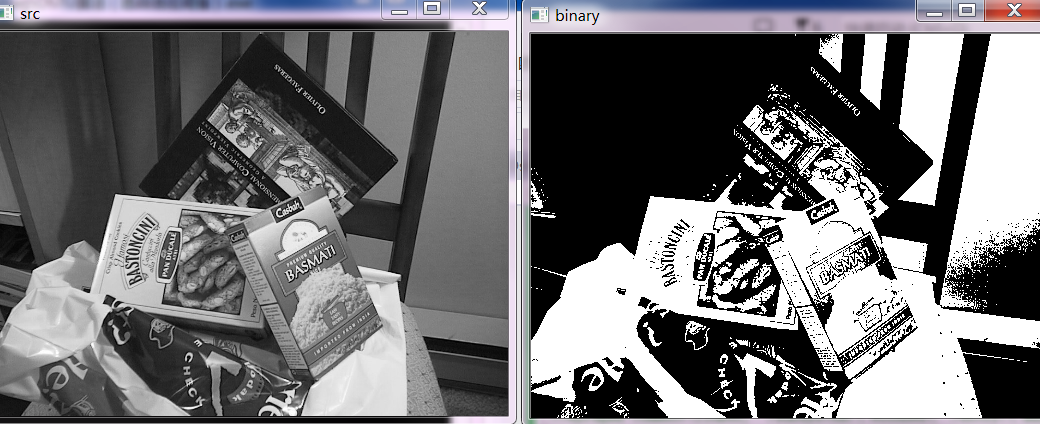
cvNamedWindow("src");
cvShowImage("src", srcImage);
IplImage* biImage = cvCreateImage(cvGetSize(srcImage), 8, 1);
int threshold = otsu(srcImage);
cvThreshold(srcImage, biImage, threshold, 255, CV_THRESH_BINARY);
cvNamedWindow("binary");
cvShowImage("binary", biImage);
cvWaitKey(0);
cvReleaseImage(&srcImage);
cvReleaseImage(&biImage);
cvDestroyWindow("src");
cvDestroyWindow("binary");
return 0;
}






















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









