









平面多项式拟合公式转换模型变换关系理解
{ X 2 = X 1 + Δ X Y 2 = Y 1 + Δ Y (1) \tag{1} \begin{dcases} X_2 = X_1 + \varDelta{X} \\ Y_2 = Y_1 + \varDelta{Y} \\ \end{dcases} {X2=X1+ΔXY2=Y1+ΔY(1)
式中:
式中:
式中:
X
1
,
Y
1
:原平面直角坐标系;
X_1,Y_1:原平面直角坐标系;
X1,Y1:原平面直角坐标系;
X
2
,
Y
2
:新平面直角坐标系;
X_2,Y_2:新平面直角坐标系;
X2,Y2:新平面直角坐标系;
Δ
X
,
Δ
Y
:坐标转换改正量,计算公式为:
\varDelta{X},\varDelta{Y}:坐标转换改正量,计算公式为:
ΔX,ΔY:坐标转换改正量,计算公式为:
Δ
X
=
a
0
+
a
1
X
+
a
2
Y
+
a
3
X
2
+
a
4
X
Y
+
a
5
Y
2
+
a
6
X
3
+
a
7
X
2
Y
+
a
8
X
Y
2
+
a
9
Y
3
+
⋯
Δ
Y
=
b
0
+
b
1
X
+
b
2
Y
+
b
3
X
2
+
b
4
X
Y
+
b
5
Y
2
+
b
6
X
3
+
b
7
X
2
Y
+
b
8
X
Y
2
+
b
9
Y
3
+
⋯
\varDelta{X}=a_0+a_1X+a_2Y+a_3X^2+a_4XY+a_5Y^2+a_6X^3+a_7X^2Y+a_8XY^2+a_9Y^3+\cdots \\ \varDelta{Y}=b_0+b_1X+b_2Y+b_3X^2+b_4XY+b_5Y^2+b_6X^3+b_7X^2Y+b_8XY^2+b_9Y^3+\cdots \\
ΔX=a0+a1X+a2Y+a3X2+a4XY+a5Y2+a6X3+a7X2Y+a8XY2+a9Y3+⋯ΔY=b0+b1X+b2Y+b3X2+b4XY+b5Y2+b6X3+b7X2Y+b8XY2+b9Y3+⋯
其中,
a
i
,
b
i
为系数
(
i
=
0
,
1
,
2
,
⋯
)
,通过最小二乘求解。
其中,a_i,b_i为系数(i=0,1,2,\cdots),通过最小二乘求解。
其中,ai,bi为系数(i=0,1,2,⋯),通过最小二乘求解。
(
1
)
式转为矩阵方程式为:
(1)式转为矩阵方程式为:
(1)式转为矩阵方程式为:
[
X
2
Y
2
]
=
[
X
1
Y
1
]
+
[
1
X
Y
X
2
X
Y
Y
2
X
3
X
2
Y
X
Y
2
Y
3
⋯
0
0
0
0
0
0
0
0
0
0
⋯
0
0
0
0
0
0
0
0
0
0
⋯
1
X
Y
X
2
X
Y
Y
2
X
3
X
2
Y
X
Y
2
Y
3
⋯
]
[
a
0
a
1
a
2
a
3
a
4
a
5
a
6
a
7
a
8
a
9
⋮
b
0
b
1
b
2
b
3
b
4
b
5
b
6
b
7
b
8
b
9
⋮
]
\begin{bmatrix} X_2 \\ Y_2 \end{bmatrix} = \begin{bmatrix} X_1 \\ Y_1 \end{bmatrix} + \begin{bmatrix} 1 & X & Y & X^2 & XY & Y^2 & X^3 & X^2Y & XY^2 & Y^3 & \cdots & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & \cdots \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & \cdots & 1 & X & Y & X^2 & XY & Y^2 & X^3 & X^2Y & XY^2 & Y^3 & \cdots \\ \end{bmatrix} \begin{bmatrix} a_0 \\ a_1 \\ a_2 \\ a_3 \\ a_4 \\ a_5 \\ a_6 \\ a_7 \\ a_8 \\ a_9 \\ \vdots \\ b_0 \\ b_1 \\ b_2 \\ b_3 \\ b_4 \\ b_5 \\ b_6 \\ b_7 \\ b_8 \\ b_9 \\ \vdots \end{bmatrix}
[X2Y2]=[X1Y1]+[10X0Y0X20XY0Y20X30X2Y0XY20Y30⋯⋯010X0Y0X20XY0Y20X30X2Y0XY20Y3⋯⋯]⎣
⎡a0a1a2a3a4a5a6a7a8a9⋮b0b1b2b3b4b5b6b7b8b9⋮⎦
⎤
基于最小二乘与多对同名点对计算参数
设存在
n
对同名点对:
(
X
a
,
Y
a
)
1
→
(
X
b
,
Y
b
)
1
,
⋯
,
(
X
a
,
Y
a
)
n
→
(
X
b
,
Y
b
)
n
.
设存在n对同名点对:(X_a,Y_a)_1 \rarr (X_b,Y_b)_1,\cdots,(X_a,Y_a)_n \rarr (X_b,Y_b)_n.
设存在n对同名点对:(Xa,Ya)1→(Xb,Yb)1,⋯,(Xa,Ya)n→(Xb,Yb)n.
令
令
令
θ
=
[
a
0
a
1
a
2
a
3
a
4
a
5
a
6
a
7
a
8
a
9
⋮
b
0
b
1
b
2
b
3
b
4
b
5
b
6
b
7
b
8
b
9
⋮
]
\theta = \begin{bmatrix} a_0 \\ a_1 \\ a_2 \\ a_3 \\ a_4 \\ a_5 \\ a_6 \\ a_7 \\ a_8 \\ a_9 \\ \vdots \\ b_0 \\ b_1 \\ b_2 \\ b_3 \\ b_4 \\ b_5 \\ b_6 \\ b_7 \\ b_8 \\ b_9 \\ \vdots \end{bmatrix}
θ=⎣
⎡a0a1a2a3a4a5a6a7a8a9⋮b0b1b2b3b4b5b6b7b8b9⋮⎦
⎤
v
i
=
(
X
b
−
X
a
,
Y
b
−
Y
a
)
i
T
,
v_i=(X_b - X_a,Y_b - Y_a)^T_i,
vi=(Xb−Xa,Yb−Ya)iT,
P
i
=
[
1
X
Y
X
2
X
Y
Y
2
X
3
X
2
Y
X
Y
2
Y
3
⋯
0
0
0
0
0
0
0
0
0
0
⋯
0
0
0
0
0
0
0
0
0
0
⋯
1
X
Y
X
2
X
Y
Y
2
X
3
X
2
Y
X
Y
2
Y
3
⋯
]
i
,
P_i= \begin{bmatrix} 1 & X & Y & X^2 & XY & Y^2 & X^3 & X^2Y & XY^2 & Y^3 & \cdots & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & \cdots \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & \cdots & 1 & X & Y & X^2 & XY & Y^2 & X^3 & X^2Y & XY^2 & Y^3 & \cdots \\ \end{bmatrix}_i,
Pi=[10X0Y0X20XY0Y20X30X2Y0XY20Y30⋯⋯010X0Y0X20XY0Y20X30X2Y0XY20Y3⋯⋯]i,
i
=
1
,
⋯
,
n
i=1,\cdots,n
i=1,⋯,n
根据式
(
3
)
,代入样本值得到方程组如下:
根据式(3),代入样本值得到方程组如下:
根据式(3),代入样本值得到方程组如下:
{
P
1
θ
=
v
1
P
2
θ
=
v
2
⋮
P
n
θ
=
v
n
\begin{dcases} P_1\theta = v_1 \\ P_2\theta = v_2 \\ \vdots \\ P_n\theta = v_n \end{dcases}
⎩
⎨
⎧P1θ=v1P2θ=v2⋮Pnθ=vn
则变换为矩阵方程为:
则变换为矩阵方程为:
则变换为矩阵方程为:
v
=
P
θ
v = P\theta
v=Pθ
P
=
[
P
1
P
2
⋮
P
n
]
,
v
=
[
v
1
v
2
⋮
v
n
]
P= \begin{bmatrix} P_1 \\ P_2 \\ \vdots \\ P_n \end{bmatrix}, v= \begin{bmatrix} v_1 \\ v_2 \\ \vdots \\ v_n \end{bmatrix}
P=⎣
⎡P1P2⋮Pn⎦
⎤,v=⎣
⎡v1v2⋮vn⎦
⎤
考虑
v
=
P
θ
无解,需要从
P
的列空间中找出最接近
v
的向量
u
(
u
可以理解为
v
在
P
的列空间中的投影,理解如下图所示:)
考虑v = P\theta无解,需要从P的列空间中找出最接近v的向量u(u可以理解为v在P的列空间中的投影,理解如下图所示:)
考虑v=Pθ无解,需要从P的列空间中找出最接近v的向量u(u可以理解为v在P的列空间中的投影,理解如下图所示:)
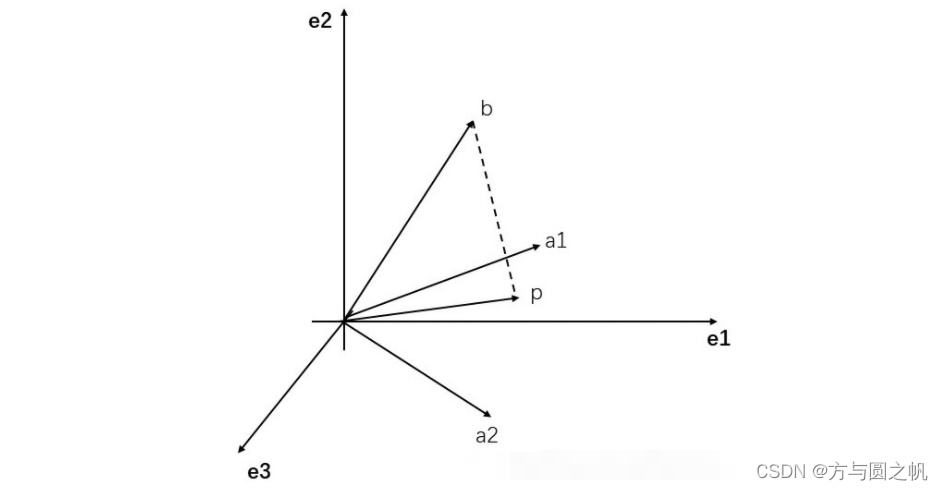
如上图所示,
p
是
b
在
[
a
1
a
2
]
列空间中的投影。
如上图所示,p是b在\begin{bmatrix} a_1 & a_2 \end{bmatrix} 列空间中的投影。
如上图所示,p是b在[a1a2]列空间中的投影。
令
e
=
v
−
u
,最小二乘就是找到
∥
e
∥
2
最小的点,最小二乘就是指向量长度的最小平方。
令e=v-u,最小二乘就是找到\parallel e \parallel^2最小的点,最小二乘就是指向量长度的最小平方。
令e=v−u,最小二乘就是找到∥e∥2最小的点,最小二乘就是指向量长度的最小平方。
由上可知,
u
位于
P
的列空间中,即
u
是
P
的各列的线性组合:
由上可知,u位于P的列空间中,即u是P的各列的线性组合:
由上可知,u位于P的列空间中,即u是P的各列的线性组合:
令
P
的列空间为
P
=
[
C
1
C
2
⋯
C
m
]
令P的列空间为 P= \begin{bmatrix} C_1 & C_2 & \cdots & C_m \end{bmatrix}
令P的列空间为P=[C1C2⋯Cm]
故存在
u
=
C
1
θ
1
~
+
C
2
θ
2
~
+
⋯
+
C
m
θ
m
~
故存在 u=C_1\tilde{\theta_1} + C_2\tilde{\theta_2} + \cdots + C_m\tilde{\theta_m}
故存在u=C1θ1~+C2θ2~+⋯+Cmθm~
即
P
θ
~
=
u
有解。
即P\tilde{\theta}=u有解。
即Pθ~=u有解。
e
=
v
−
u
=
v
−
P
θ
~
e=v-u=v-P\tilde{\theta}
e=v−u=v−Pθ~
e
正交于
P
的列空间,存在:
e正交于P的列空间,存在:
e正交于P的列空间,存在:
e
⊥
C
1
,
e
⊥
C
2
,
⋯
,
e
⊥
C
m
e \perp C_1,e \perp C_2,\cdots,e \perp C_m
e⊥C1,e⊥C2,⋯,e⊥Cm
由向量点积关系式可得: 由向量点积关系式可得: 由向量点积关系式可得:
⇒ { C 1 T ( v − P θ ~ ) = 0 C 2 T ( v − P θ ~ ) = 0 ⋮ C m T ( v − P θ ~ ) = 0 \Rarr \begin{dcases} C_1^T(v-P\tilde{\theta})=0 \\ C_2^T(v-P\tilde{\theta})=0 \\ \vdots \\ C_m^T(v-P\tilde{\theta})=0 \end{dcases} ⇒⎩ ⎨ ⎧C1T(v−Pθ~)=0C2T(v−Pθ~)=0⋮CmT(v−Pθ~)=0
⇒ [ C 1 T C 2 T C 3 T ⋮ C m T ] ( v − P θ ~ ) = [ 0 0 0 ⋮ 0 ] \Rarr \begin{bmatrix} C_1^T \\ C_2^T \\ C_3^T \\ \vdots \\ C_m^T \end{bmatrix} (v-P\tilde{\theta})= \begin{bmatrix} 0 \\ 0 \\ 0 \\ \vdots \\ 0 \end{bmatrix} ⇒⎣ ⎡C1TC2TC3T⋮CmT⎦ ⎤(v−Pθ~)=⎣ ⎡000⋮0⎦ ⎤
∵
P
=
[
C
1
C
2
⋯
C
m
]
\because P= \begin{bmatrix} C_1 & C_2 & \cdots & C_m \end{bmatrix}
∵P=[C1C2⋯Cm]
∴
P
T
=
[
C
1
T
C
2
T
⋮
C
m
T
]
\therefore P^T = \begin{bmatrix} C_1^T \\ C_2^T \\ \vdots \\ C_m^T \end{bmatrix}
∴PT=⎣
⎡C1TC2T⋮CmT⎦
⎤
⇒
P
T
(
v
−
P
θ
~
)
=
0
\Rarr P^T(v-P\tilde{\theta})=0
⇒PT(v−Pθ~)=0
⇒
P
T
P
θ
~
=
P
T
v
\Rarr P^TP\tilde{\theta}=P^Tv
⇒PTPθ~=PTv
⇒
θ
~
=
(
P
T
P
)
−
1
P
T
v
\Rarr \tilde{\theta}=(P^TP)^{-1}P^Tv
⇒θ~=(PTP)−1PTv
即 θ ~ = ( P T P ) − 1 P T v 为基于最小二乘计算出来的最接近实际参数的转换值 即\tilde{\theta}=(P^TP)^{-1}P^Tv为基于最小二乘计算出来的最接近实际参数的转换值 即θ~=(PTP)−1PTv为基于最小二乘计算出来的最接近实际参数的转换值














 862
862











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









