






一、CubeMx配置
1.初始化
定时器2~5来自时钟RCC_CLOCKTYPE_PCLK2 = 84M
定时器1来自时钟RCC_CLOCKTYPE_HCLK = 168M
TIM2: PSC = 83, ARR = 999; 1000hz
TIM3: PSC = 83, ARR = 999; 1000hz
TIM4: PSC = 83, ARR = 999; 1000hz
TIM5: PSC = 83, ARR = 999; 1000hz
TIM1: PSC = 41, ARR = 125; 16khz
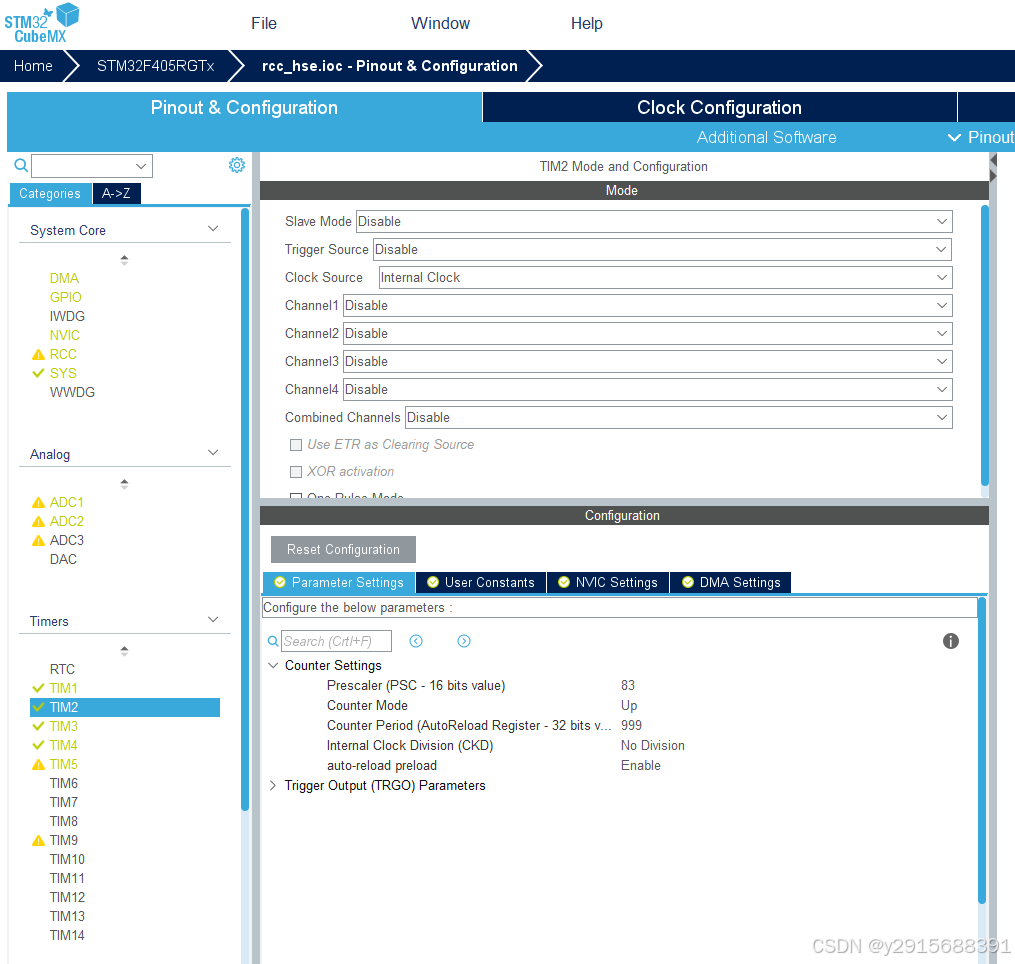
定时器预分频系数: 83 ;;计数模式:向上计数;;; 自动重装载值 : 999
时钟分频因子:不分频 ;;自动重装载: 使能
定时器的定时周期:T = (psc+1)(arr+1)/Tclk
psc 为定时器预分频系数,arr为自动重装载值,Tclk为系统时钟频率
TIMx: PSC = 83, ARR = 999; 1ms计数一次
TIMx: PSC = 83, ARR = 9999; 10ms计数一次
TIMx: PSC = 83, ARR = 99999; 100ms计数一次
TIMx: PSC = 83, ARR = 999999; 1000ms计数一次
2.中断配置
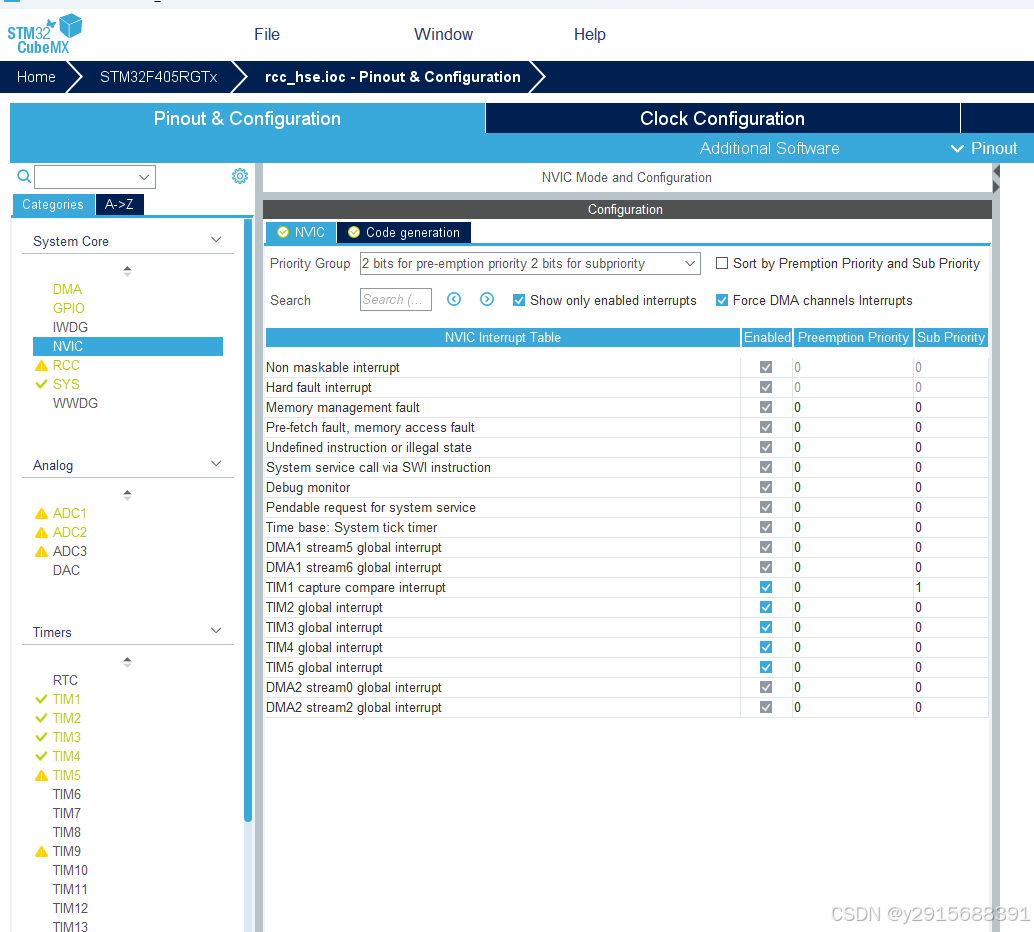
TIM1的频率高,更新时间快,设置中断等级低于TIM2~TIM5
TIM2~ TIM5频率一样,中断等级相同
二、代码+仿真
#include "tim.h"
TIM_HandleTypeDef htim1;
TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim4;
TIM_HandleTypeDef htim5;
void MX_TIM1_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
htim1.Instance = TIM1;
htim1.Init.Prescaler = 41; //分频值
htim1.Init.CounterMode = TIM_COUNTERMODE_CENTERALIGNED3; //计数模式
htim1.Init.Period = 125; //自动重载值
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; //分频因子,死区用
htim1.Init.RepetitionCounter = 0; //重复计数值
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; //自动重载值,预重载
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; //配置为内部时钟源
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_OC_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_UPDATE; //TRGO信号将在定时器溢出时产生中断
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; //禁用主从模式,定时器独立工作
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM2; //工作模式
sConfigOC.Pulse = 0; //比较值
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; //有效电平(H\L)//有效电平(H\L)
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH; //互补通道,设置一样会相反
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; //关闭快速模式
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET; //设置空闲电平
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET; //设置互补通道空闲电平
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_TIMING; //输出引脚电平被冻结,输出引脚不在翻转
if (HAL_TIM_OC_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_4) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_ENABLE; //OSSR:0
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_ENABLE; //OSSI:0
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF; //不使用锁定
sBreakDeadTimeConfig.BreakState = 0x54; //死区时间500ns
sBreakDeadTimeConfig.BreakState = TIM_BREAK_ENABLE; //刹车使能
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;//刹车高电平触发
sBreakDeadTimeConfig.BreakFilter = 0X8; //刹车滤波
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_ENABLE; //MOE自动功能
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim1);
}
void MX_TIM2_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 83;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 999;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
/* TIM3 init function */
void MX_TIM3_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim3.Instance = TIM3;
htim3.Init.Prescaler = 83;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 999;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
/* TIM4 init function */
void MX_TIM4_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim4.Instance = TIM4;
htim4.Init.Prescaler = 83;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 999;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
/* TIM5 init function */
void MX_TIM5_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim5.Instance = TIM5;
htim5.Init.Prescaler = 83;
htim5.Init.CounterMode = TIM_COUNTERMODE_UP;
htim5.Init.Period = 999;
htim5.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim5.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim5) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim5, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim5, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(tim_baseHandle->Instance==TIM1)
{
__HAL_RCC_TIM1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
//PA6--->TIM1_BKIN
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
HAL_NVIC_SetPriority(TIM1_BRK_TIM9_IRQn, 1,0 ); //刹车中断
HAL_NVIC_EnableIRQ(TIM1_BRK_TIM9_IRQn);
HAL_NVIC_SetPriority(TIM1_CC_IRQn, 1, 0); //输出中断
HAL_NVIC_EnableIRQ(TIM1_CC_IRQn);
}
else if(tim_baseHandle->Instance==TIM2)
{
/* TIM2 clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
/* TIM2 interrupt Init */
HAL_NVIC_SetPriority(TIM2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
}
else if(tim_baseHandle->Instance==TIM3)
{
/* TIM3 clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
/* TIM3 interrupt Init */
HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
}
else if(tim_baseHandle->Instance==TIM4)
{
/* TIM4 clock enable */
__HAL_RCC_TIM4_CLK_ENABLE();
/* TIM4 interrupt Init */
HAL_NVIC_SetPriority(TIM4_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM4_IRQn);
}
else if(tim_baseHandle->Instance==TIM5)
{
/* TIM5 clock enable */
__HAL_RCC_TIM5_CLK_ENABLE();
/* TIM5 interrupt Init */
HAL_NVIC_SetPriority(TIM5_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM5_IRQn);
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(timHandle->Instance==TIM1)
{
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM1 GPIO Configuration
PB13 ------> TIM1_CH1N
PB14 ------> TIM1_CH2N
PB15 ------> TIM1_CH3N
PA8 ------> TIM1_CH1
PA9 ------> TIM1_CH2
PA10 ------> TIM1_CH3
PA11 ------> TIM1_CH4
*/
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
}
进入一次中断计数值++;
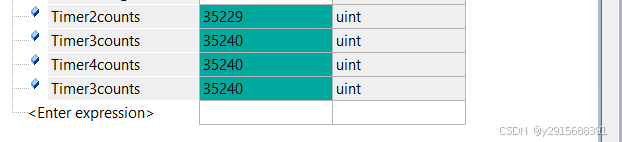
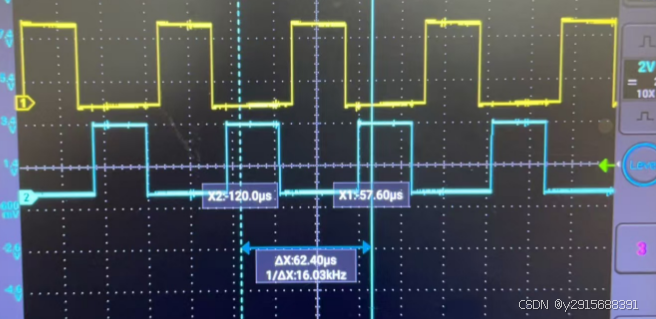
TIM2~TIM5:1000hz
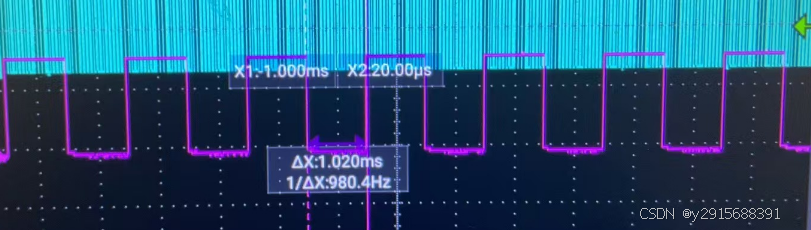
TIM1:16khz

















 1205
1205

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









