






FaceBoxes: A CPU Real-time Face Detector with High Accuracy
FaceBoxes:一款高精度的CPU实时人脸检测器
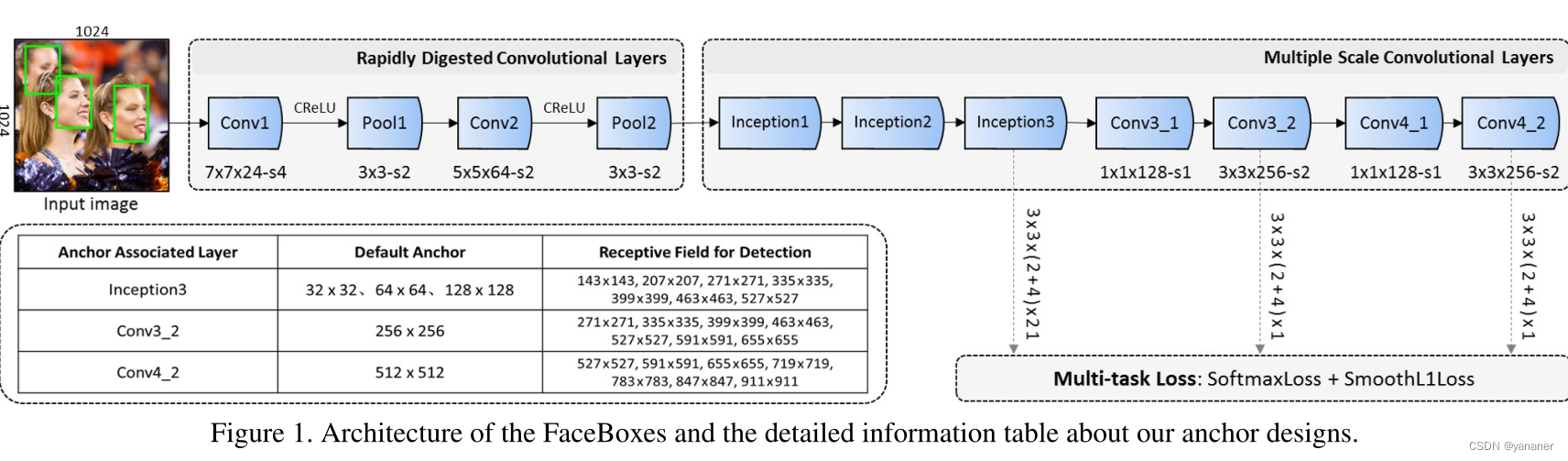
Rapidly Digested Convolutional Layers (RDCL),Multiple Scale Convolutional Layers (MSCL)模块,anchor密集策略。
Rapidly Digested Convolutional Layers (RDCL)
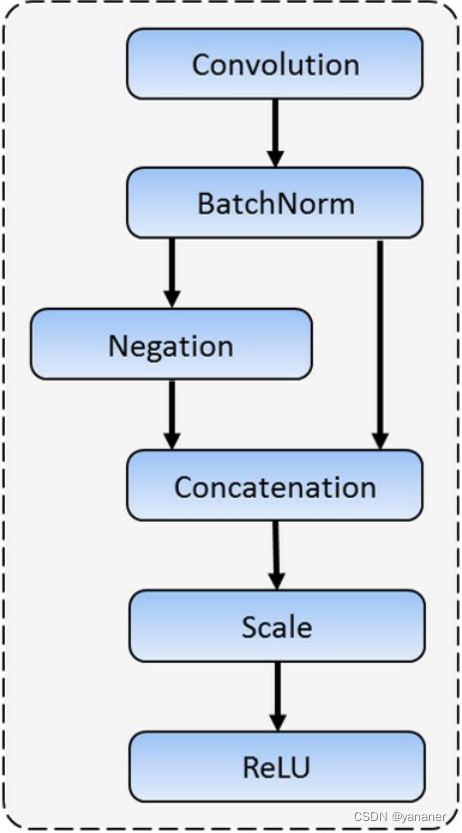
学习到的卷积核存在冗余。
底层卷积时卷积核存在负相关,也就是说假设我们本来使用10个卷积核,但是现在只需要用5个卷积核,另外5个卷积核的结果可以通过负相关得到。结果表明使用C.ReLU加速的同时也没损失精度。
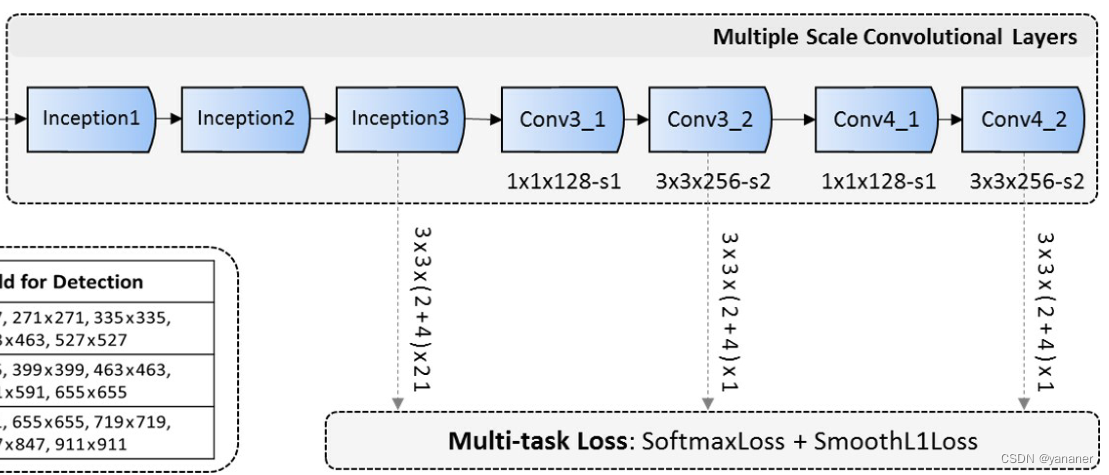
Multiple Scale Convolutional Layers (MSCL)模块
MSCL在多个上尺度进行回归和分类,在不同尺度下检测不同大小的人脸,能够大大提高检测的召回率。
深度:在MSCL模块中,随着网络的加深,便得到不同大小的特征映射(多尺度特征)。在不同大小特征映射中设置不同大小的anchor,有利于检测不同大小的人脸。
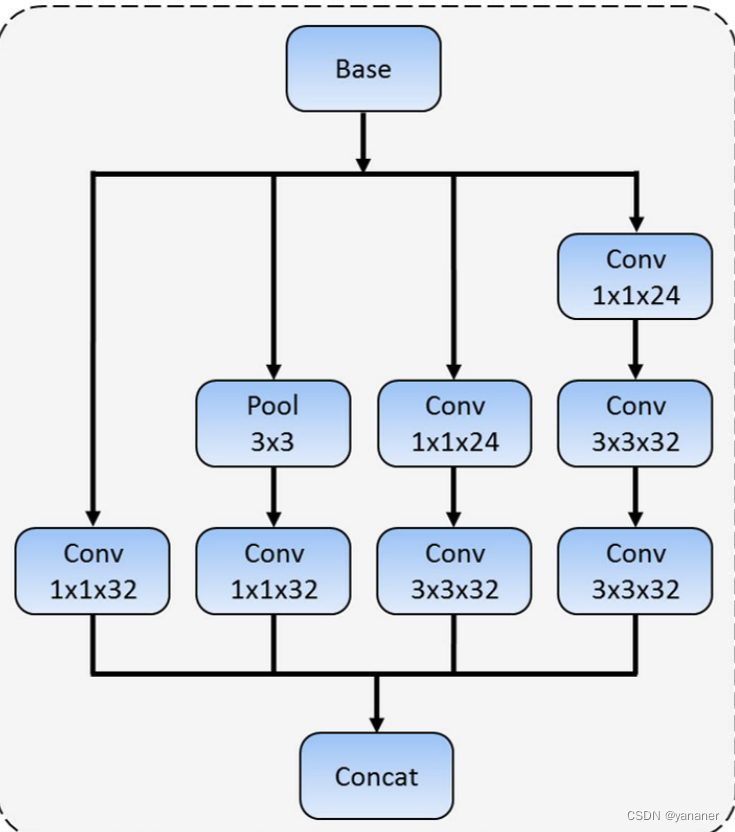
宽度:Inception由多个不同核大小的卷积分支组成。在这些分支中,不同的网络宽度,也有不同大小的特征映射。使用inception结构,由于Inception包含多个不同的卷积分支,有利用检测不同大小的人脸因此可以进一步使得感受野多样化。
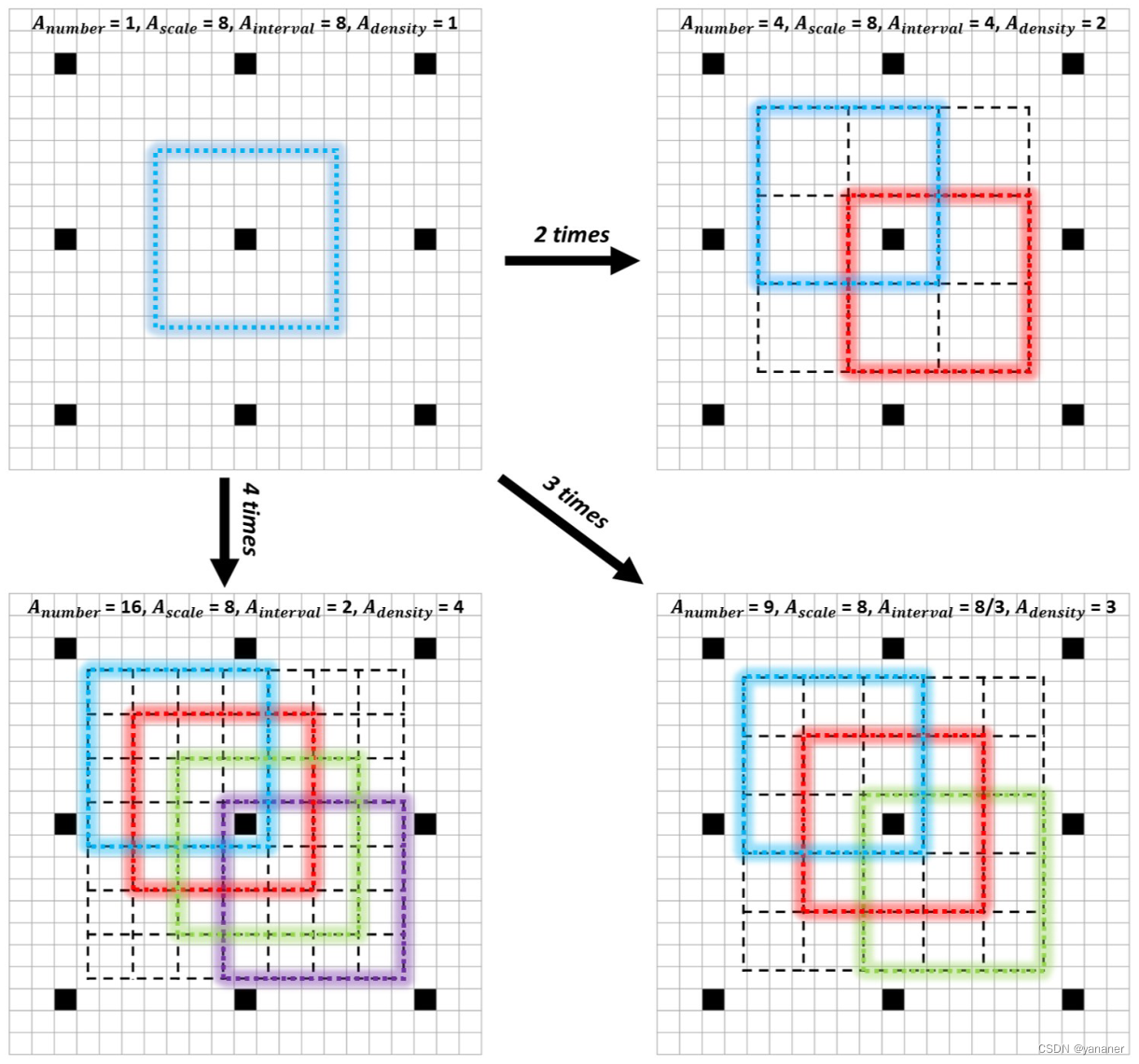
anchor密集策略

![]() anchor密度;
anchor密度;![]() anchor尺度大小;
anchor尺度大小;![]() anchor间隔。
anchor间隔。
| 尺度大小 | 间隔 | 密度 | |
| Inception3 | 32,64,128 | 32 | 1,2,4 |
| Conv3_2 | 256 | 64 | 4 |
| Conv4_2 | 512 | 128 | 4 |
不同尺度的anchor之间存在密度不平衡的问题,导致小尺度的人脸召回率比较低,为了改善小anchor的密度,本文提出anchor密度策略。为了使anchor密集n倍,作者均匀地将![]() 个anchor铺在感受野的中心附近,而不是铺在中心。
个anchor铺在感受野的中心附近,而不是铺在中心。
将32x32的anchor密集4倍,64x64的anchor密集两倍,以保证不同尺度的anchor有相同的密度。















 2932
2932











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









