






一、像素和像元
像素:是图像的最小组成单元。将一张图放大,可以看到每一个小格表示一个像素,其中每一个像素对应一个灰度值。
像元:是相机芯片上的最小感光单元,每个像元对应图像上的一个像素。
二、像元深度
存储每个像素所用的数据位数,称为像元深度。对于黑白相机来说,像元深度定义灰度由暗到亮的灰阶数。
例如,像元深度是8位的相机,输出的图像灰度等级是2的8次方,即0-255共256级。像元深度是10位的相机,输出的图像灰度等级是2的10次方,即0-1023共1024级。
像元深度越大,固然可以增强测量的精度,但同时也降低了系统的速度。一般工业上都是使用8位的像元深度。
像元深度是指每个像素用多少比特位表示。通常,每个像素的比特位数多,表达图像细节的能力强,这个像素的颜色值更加丰富、分得更细,颜色深度就更深。一般像素深度有1位、8位、16位、24位和32位。
1位像素深度就有二进制来表示,也叫单色显示。
8位像素深度是最常见的,用8个二进制来表示颜色,可以表示256种颜色,这种就是常说的灰度显示。
16位是用16个二进制位来表示,能表示65536种颜色,这时就可以彩色显示。
24位和32位则表达的颜色信息就会更加的丰富!
三、像元尺寸
像元尺寸是相机芯片上每个像元的实际物理尺寸,常见的有2.2um,3.45um,3.75um,4.8um,5.5um,5.86um,7.4um等。
不同尺寸的芯片,外部光学环境和相机参数设置相同(比如曝光时间和增益等)的情况下,像元尺寸越大,能够接收到的光子数量越多,芯片灵敏度越高,感光性越好,所成图像越亮。
像元尺寸就是每个像素的面积。单个像素的面积小,单位面积的像素数量多,相机的分辨率增加,有利于对细小缺陷的检测和增大检测视场。随着像素面积的缩小,满阱能力(每个像素能够存储的电荷数量)也随之减小,造成相机动态范围的降低。
四、精度
图像中每个像素代表的实际物理尺寸。
精度 = 单方向视场大小 / 相机单方向分辨率
例如:视场水平方向的长度是32mm,相机水平分辨率为1600,可求得视觉系统的精度为每像素对应0.02mm。
在实际应用中,为提高系统稳定性,通常要求机器视觉的理论精度高于要求精度。
五、 帧率/行频
相机的采集频率,面阵相机用帧率表示,线阵相机用行频表示。
面阵相机的帧率单位为FPS(Frame Per Second),即帧/秒,指相机每秒钟能采集多少幅图像,1幅图像为1帧。
例如15帧/秒,表示相机一秒钟最大能采集15幅图像。一般来说,分辨率越高的相机,帧率越低。
线阵相机行频单位为Hz,1Hz对应采集一行图像。例如50KHz/秒,则表示相机1秒钟内,扫描50000行。一般来说,分辨率越高的相机,行频越低。
最大帧率表示的是面阵工业相机每秒能够采集并输出的最大帧数,这往往和传感器芯片和数据输出接口带宽有关。根据项目需求,对于拍摄运动物体,建议选取高帧率相机,具体帧率数要根据拍摄精度来确定。
五、增益
输入信号与输出信号的放大比例,用来整体提高画面的亮度。增益的单位为dB。
工业相机通常具有一个对传感器的信号进行放大的视频放大器,其放大倍数称为增益。增益越大,噪声就会变大,一般情况不建议增大增益值。
六、外触发
工业相机一般都具有外触发功能,可以根据外部信号控制图像采集,即接收到一次外部信号,采集一次图像。在实际使用中,可以用传感器和相机的外触发功能配合,进行灵活的使用。
注意事项:
在有些使用相机外触发功能的场合,可能会有其他的电子设备的运用,例如直流/交流电机,变频器,接触器等等,如果对各种信号的屏蔽做的不好,很有可能对相机的外触发信号造成干扰,影响相机的使用。
信号输出:
在使用相机的外触发功能时,一般来讲,外部光源的照明也是配合相机处于外触发状态。相机采集时光源亮,相机未采集时光源灭。有的相机具有信号输出功能,输出触发信号,从而控制光源的亮和灭,从而配合相机的图像采集。
七、曝光时间/曝光方式
曝光时间:
曝光时间是指光投射到相机传感器芯片上,相机芯片的感光时间。一般曝光时间越长,图像越亮。
也可以解释为:传感器将光信号转换为电信号形成一帧图像,每个像元接受光信号的过程叫曝光,所花费的时间叫曝光时间,也叫快门速度。
外触发同步的采集方式,曝光时间可以与行周期一致,也可以设定一个固定的时间。
曝光方式:
工业相机中曝光方式分为:行曝光(rolling shutter)和帧曝光(global shutter)。
帧曝光是指传感器阵列中所有像素同时曝光,即一次性曝光所有像素,曝光周期由预先设定的快门时间确定。这种曝光方式的相机适合拍摄运动物体,图像不会偏移,不会失真。

行曝光是指同一行上的像素同时曝光,不同行的曝光起始时间不同,每行的曝光时间是相同的,行间的延迟不变。这种曝光方式的相机适用于拍摄静止的物体,拍摄运动物体,图像会偏移。
总结下来:行曝光就是逐行曝光,帧曝光为一次性曝光所有像元。线阵相机为逐行曝光,可以选择固定行频。
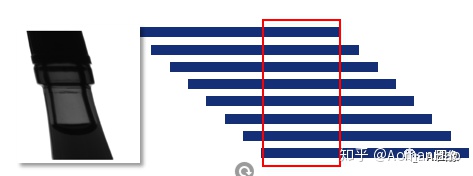
八、拖影
拍摄运动物体时,由于曝光时间和运动速度不匹配,导致物体在像元上重复成像。
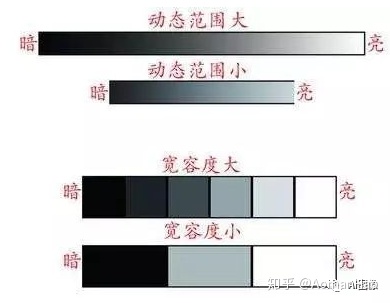
九、动态范围
相机的动态范围表明相机可探测光信号的范围,相机所能拍摄到从”最暗“至”最亮“的范围。对于固定相机,其动态范围是一个固定值,不随外界的条件变化而变化。动态范围可以用倍数、dB或bit等方式来表示。动态范围越大,则相机更能适应不同的光照强度,所能表现的层次越丰富,所包含的色彩空间也越广。
在线性响应区,相机的动态范围定义为饱和曝光量与噪声等效曝光量的比值:
动态范围 = (光敏元的满阱容量 / 等效噪声信号)
动态范围是用来描述每个像素能够分辨出的灰度等级。它是饱和电压(最大的输出电平)相机输出的噪声之比。宽动态范围能够使场景中非常亮和非常昏暗部分的细节同时被清晰的显示。
一般来说,低动态范围的相机噪声比较多,照片会缺失亮部细节和暗部细节。

十、噪点/信噪比
噪点:感光芯片将光线作为接收信号并输出的过程中所产生的图像中的粗糙部分,也指图像中不该出现的外来像素。
信噪比:表示相机系统中真实图像信号与图像噪声的比例。
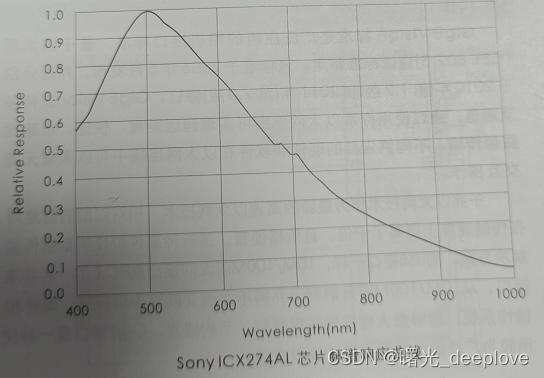
十一、光谱响应
光谱响应是指相机的芯片对不同波长的光线的响应能力。一般用光谱响应曲线表示,如图x轴表示入射光的波长,y轴表示响应能力。根据响应光谱的不同,可以把相机分为可见光相机(400nm-1000nm,峰值500nm-600nm),红外相机(700nm以上),紫外相机(200nm-400nm)。根据应用不同,而选择不同的光谱响应相机。
参考:
奥普特机器视觉手册

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











