







笔记
为简化对于桶排序的分析,我们假设
n
n
n个输入数据分布在
[
0
,
1
)
[0, 1)
[0,1)区间上。将
[
0
,
1
)
[0, 1)
[0,1)区间划分为
n
n
n个相同大小的子区间,这些子区间都称为桶。如果输入数据是均匀分布的,可以预见每个桶所包含的元素个数是近乎均匀的,不太可能出现很多元素都落在同一个桶中的情况。为得到输出,我们先对每个桶中的元素进行排序,然按照次序把每个桶中的元素列出来即可。
在下面桶排序的伪代码中,输入是一个包含
n
n
n个元素的数组
A
A
A,且每个元素
A
[
i
]
A[i]
A[i]满足
0
≤
A
[
i
]
<
1
0 ≤ A[i] < 1
0≤A[i]<1。此外,还需要一个临时数组
B
[
0..
n
−
1
]
B[0..n−1]
B[0..n−1]来存放桶,这里的桶实际上是链表。另外,对每个桶内元素的排序采用的是插入排序算法。实际上由于每个桶都是一个链表,故采用插入排序是可行的,采用快速排序、堆排序等其他排序算法反而不可行。

下面给出一个例子来展示桶排序算法的过程。

在桶排序算法中,除了第
8
8
8行以外,所有其他各行的时间代价都是
Θ
(
n
)
Θ(n)
Θ(n)。我们现在来分析桶排序算法的期望运行时间。
用随机变量
n
i
n_i
ni表示桶
B
[
i
]
B[i]
B[i]中的元素个数,于是可以得到桶排序的运行时间为
T
(
n
)
=
Θ
(
n
)
+
∑
i
=
0
n
−
1
O
(
n
i
2
)
T(n)=Θ(n)+\sum\limits_{i=0}^{n-1}O(n_i^2 )
T(n)=Θ(n)+i=0∑n−1O(ni2)
对上式取期望,得到
E
[
T
(
n
)
]
=
E
[
Θ
(
n
)
+
∑
i
=
0
n
−
1
O
(
n
i
2
)
]
=
Θ
(
n
)
+
∑
i
=
0
n
−
1
E
[
O
(
n
i
2
)
]
E[T(n)]=E[Θ(n)+\sum\limits_{i=0}^{n-1}O(n_i^2 ) ]=Θ(n)+\sum\limits_{i=0}^{n-1}E[O(n_i^2 )]
E[T(n)]=E[Θ(n)+i=0∑n−1O(ni2)]=Θ(n)+i=0∑n−1E[O(ni2)]
我们先单独分析
∑
i
=
0
n
−
1
E
[
O
(
n
i
2
)
]
\sum_{i=0}^{n-1}E[O(n_i^2 )]
∑i=0n−1E[O(ni2)]这一项,令
T
′
=
∑
i
=
0
n
−
1
E
[
O
(
n
i
2
)
]
T'=\sum_{i=0}^{n-1}E[O(n_i^2 )]
T′=∑i=0n−1E[O(ni2)]。根据
O
O
O记号的定义,存在正常量
c
c
c,使得对于足够大的
n
i
n_i
ni,有
T
′
≤
∑
i
=
0
n
−
1
E
[
c
n
i
2
]
=
∑
i
=
0
n
−
1
c
E
[
n
i
2
]
T'≤\sum_{i=0}^{n-1}E[cn_i^2 ] =\sum_{i=0}^{n-1}cE[n_i^2 ]
T′≤∑i=0n−1E[cni2]=∑i=0n−1cE[ni2] 。于是有
T
′
=
∑
i
=
0
n
−
1
O
(
E
[
n
i
2
]
)
T'=\sum_{i=0}^{n-1}O(E[n_i^2 ])
T′=∑i=0n−1O(E[ni2])。于是
E
[
T
(
n
)
]
E[T(n)]
E[T(n)]可以写为
E
[
T
(
n
)
]
=
Θ
(
n
)
+
∑
i
=
0
n
−
1
O
(
E
[
n
i
2
]
)
E[T(n)]=Θ(n)+\sum\limits_{i=0}^{n-1}O(E[n_i^2 ])
E[T(n)]=Θ(n)+i=0∑n−1O(E[ni2])
我们现在来分析
E
[
n
i
2
]
E[n_i^2 ]
E[ni2]。对所有
i
=
0
,
1
,
…
,
n
−
1
i = 0, 1, …, n−1
i=0,1,…,n−1和
j
=
1
,
2
,
…
,
n
j = 1, 2, …, n
j=1,2,…,n,定义指示器随机变量
X
i
j
X_{ij}
Xij
X
i
j
=
I
{
A
[
j
]
落
入
桶
B
[
i
]
中
}
X_{ij} = I\{A[j]落入桶B[i]中\}
Xij=I{A[j]落入桶B[i]中}
于是可以得到桶
i
i
i中的元素个数
n
i
=
∑
j
=
1
n
X
i
j
n_i=\sum\limits_{j=1}^{n}X_{ij}
ni=j=1∑nXij。于是有

现在分别计算这两项累加和。由于我们假定输入数据服从均匀分布,所以指示器随机变量
X
i
j
X_{ij}
Xij为
1
1
1的概率是
1
/
n
1/n
1/n,为
0
0
0的概率是
1
−
1
/
n
1−1/n
1−1/n。于是有
E
[
X
i
j
2
]
=
1
2
∙
1
n
+
0
2
∙
(
1
−
1
n
)
=
1
n
E[X_{ij}^2 ]=1^2∙\frac{1}{n}+0^2∙(1-\frac{1}{n})=\frac{1}{n}
E[Xij2]=12∙n1+02∙(1−n1)=n1
当
k
≠
j
k ≠ j
k=j时,随机变量
X
i
j
X_{ij}
Xij和
X
i
k
X_{ik}
Xik是互相独立的,因此有
E
[
X
i
j
X
i
k
]
=
E
[
X
i
j
]
E
[
X
i
k
]
=
1
n
∙
1
n
=
1
n
2
E[X_{ij}X_{ik}]=E[X_{ij}]E[X_{ik}]=\frac{1}{n}∙\frac{1}{n}=\frac{1}{n^2}
E[XijXik]=E[Xij]E[Xik]=n1∙n1=n21
利用这两个期望值可以得到

最终可以得到桶排序算法的期望运行时间为
E
[
T
(
n
)
]
=
Θ
(
n
)
+
∑
i
=
0
n
−
1
O
(
E
[
n
i
2
]
)
=
Θ
(
n
)
+
n
∙
O
(
2
−
1
n
)
=
Θ
(
n
)
E[T(n)]=Θ(n)+\sum\limits_{i=0}^{n-1}O(E[n_i^2 ]) =Θ(n)+n∙O(2-\frac{1}{n})=Θ(n)
E[T(n)]=Θ(n)+i=0∑n−1O(E[ni2])=Θ(n)+n∙O(2−n1)=Θ(n)
根据以上分析,如果输入数据服从均匀分布,桶排序可以在线性时间内完成。然而,根据等式
E
[
T
(
n
)
]
=
Θ
(
n
)
+
∑
i
=
0
n
−
1
O
(
E
[
n
i
2
]
)
E[T(n)]=Θ(n)+\sum_{i=0}^{n-1}O(E[n_i^2 ])
E[T(n)]=Θ(n)+∑i=0n−1O(E[ni2]),只要满足所有桶中元素个数
n
0
,
n
1
,
…
n
n
−
1
n_0, n_1, …n_{n−1}
n0,n1,…nn−1的平方和
∑
i
=
0
n
−
1
n
i
2
=
Θ
(
n
)
\sum_{i=0}^{n-1}n_i^2 =Θ(n)
∑i=0n−1ni2=Θ(n),桶排序就仍然可以在线性时间内完成。
练习
8.4-1 参照图8-4的方法,说明BUCKET-SORT在数组
A
=
<
0.79
,
0.13
,
0.16
,
0.64
,
0.39
,
0.20
,
0.89
,
0.53
,
0.71
,
0.42
>
A = <0.79, 0.13, 0.16, 0.64, 0.39, 0.20, 0.89, 0.53, 0.71, 0.42>
A=<0.79,0.13,0.16,0.64,0.39,0.20,0.89,0.53,0.71,0.42>上的操作过程。
解

8.4-2 解释为什么桶排序在最坏情况下运行时间是
Θ
(
n
2
)
Θ(n^2)
Θ(n2)?我们应该如何修改算法,使其在保持平均情况为线性时间代价的同时,最坏情况下时间代价为
Θ
(
n
l
g
n
)
Θ(n{\rm lgn})
Θ(nlgn)?
解
桶排序的最坏情况发生在所有元素都集中一个桶中的时候,这时候对桶内的元素调用插入排序的时间为
Θ
(
n
2
)
Θ(n^2)
Θ(n2)。
要使得桶排序最坏情况下的时间代价为
Θ
(
n
l
g
n
)
Θ(n\rm{lg}n)
Θ(nlgn),可以将桶内元素的插入排序算法替换为具有
O
(
n
l
g
n
)
O(n{\rm lg}n)
O(nlgn)时间复杂度的排序算法。然而每个桶都是一个链表,符合
O
(
n
l
g
n
)
O(n{\rm lg}n)
O(nlgn)时间复杂度并且适合链表的排序算法只有归并排序。堆排序虽然时间复杂度也为
O
(
n
l
g
n
)
O(n{\rm lg}n)
O(nlgn),但是不能应用在链表上。
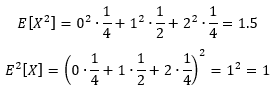
8.4-3 设
X
X
X是一个随机变量,用于表示在将一枚硬币抛掷两次时,正面朝上的次数。
E
[
X
2
]
E[X^2]
E[X2]是多少呢?
E
2
[
X
]
E^2[X]
E2[X]是多少呢?
解
下表列出了
X
X
X可能的取值以及概率。
于是有
8.4-4 在单位圆内给定
n
n
n个点,
p
i
=
(
x
i
,
y
i
)
p_i = (x_i, y_i)
pi=(xi,yi),对所有
i
=
1
,
2
,
…
,
n
i = 1, 2, …, n
i=1,2,…,n,有
0
<
x
i
2
+
y
i
2
≤
1
0<x_i^2+y_i^2≤1
0<xi2+yi2≤1。假设所有的点服从均匀分布,即在单位元的任一区域内找到给定点的概率与该区域的面积成正比。请设计一个在平均情况下有
Θ
(
n
)
Θ(n)
Θ(n)时间代价的算法,它能够按照点到原点之间的距离
d
i
=
x
i
2
+
y
i
2
d_i=\sqrt{x_i^2+y_i^2}
di=xi2+yi2对这
n
n
n个点进行排序。(提示:在BUCKET-SORT中,设计适当的桶大小,用以反映各个点在单位圆中的均匀分布情况。)
解
可以按照面积将圆等分为
n
n
n等份。由于排序是按照点到圆心的距离来进行的,所以可以用同心圆来将圆进行
n
n
n等分,如下图所示。
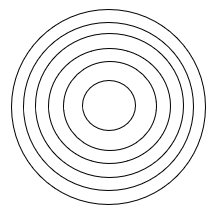
等分的目标是使得相邻同心圆之间的区域的面积相等。单位圆的面积
S
=
π
∙
1
2
=
π
S = π∙1^2 = π
S=π∙12=π。
n
n
n等分之后,每个区域的面积
s
=
π
/
n
s = π/n
s=π/n。可以算得同心圆的半径分别为
r
1
=
1
/
n
,
r
2
=
2
/
n
,
…
,
r
n
=
n
/
n
r_1=\sqrt{1/n}, r_2=\sqrt{2/n}, …, r_n=\sqrt{n/n}
r1=1/n,r2=2/n,…,rn=n/n。对于第
i
i
i个等分区域,它内部的点到圆心的距离在
(
r
i
−
1
,
r
i
]
(r_{i-1}, r_i]
(ri−1,ri]之中 (注意:
r
0
=
0
r_0 = 0
r0=0)。于是,我们对单位圆内的
n
n
n个点进行桶排序,具体做法是将到圆心距离在
(
r
i
−
1
,
r
i
]
(r_{i-1}, r_i]
(ri−1,ri]之内的点放入第
i
i
i个桶中。
如果按照距离来将每个点放入相应的桶中,还需要根据距离来查找相应的区间,而并不能直接将点入桶。这是因为在划分区间时,是按面积等分,而不是按距离等分。对每个点来说,用二分查找法来查找区间所花费的时间为
O
(
l
g
n
)
O({\rm lg}n)
O(lgn),这样一来桶排序算法的代价为
O
(
n
l
g
n
)
O(n{\rm lg}n)
O(nlgn)。而如果利用面积作为参考,可以在
Θ
(
1
)
Θ(1)
Θ(1)时间内将一个点放入到相应的桶中。对于点
(
x
i
,
y
i
)
(x_i, y_i)
(xi,yi)来说,经过该点的同心圆的面积
A
i
=
π
(
x
i
2
+
y
i
2
)
A_i=π(x_i^2+y_i^2 )
Ai=π(xi2+yi2),那么这个点应当放入第
⌈
A
i
/
s
⌉
=
⌈
n
(
x
i
2
+
y
i
2
)
⌉
⌈A_i/s⌉=⌈n(x_i^2+y_i^2 )⌉
⌈Ai/s⌉=⌈n(xi2+yi2)⌉个桶中 (注意,这里桶的序号从
1
1
1开始,而不是从
0
0
0开始)。
以下是该算法的伪代码。

8.4-5 定义随机变量
X
X
X的概率分布函数
P
(
x
)
P(x)
P(x)为
P
(
x
)
=
P
r
{
X
≤
x
}
P(x) = Pr\{X ≤ x\}
P(x)=Pr{X≤x}。假设有
n
n
n个随机变量
X
1
,
X
2
,
…
,
X
n
X_1, X_2, …, X_n
X1,X2,…,Xn服从一个连续概率分布函数
P
P
P,且它可以在
O
(
1
)
O(1)
O(1)时间内被计算得到。设计一个算法,使其能够在平均情况下在线性时间内完成这些数的排序。
解
根据概率分布函数
P
(
x
)
P(x)
P(x)将随机变量
X
1
,
X
2
,
…
,
X
n
X_1, X_2, …, X_n
X1,X2,…,Xn划分到
n
n
n个桶内。对于任意一个随机变量
X
i
X_i
Xi,将其放入第
⌈
n
P
(
X
[
i
]
)
⌉
⌈nP(X[i])⌉
⌈nP(X[i])⌉个桶 (注意,这里桶的序号从
1
1
1开始,而不是从
0
0
0开始)。如果
n
n
n个随机变量
X
1
,
X
2
,
…
,
X
n
X_1, X_2, …, X_n
X1,X2,…,Xn服从概率分布函数
P
(
x
)
P(x)
P(x),那么执行上述划分方法之后,所有随机变量应当会均匀分布在所有桶内。以下是伪代码。

代码链接:
https://github.com/yangtzhou2012/Introduction_to_Algorithms_3rd/tree/master/Chapter08/Section_8.4















 218
218











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









