






1 算法理论介绍与推荐
1.1 最近邻插值算法原理
最近邻插值,是指将目标图像中的点,对应到源图像中后,找到最相邻的整数点,作为插值后的输出。
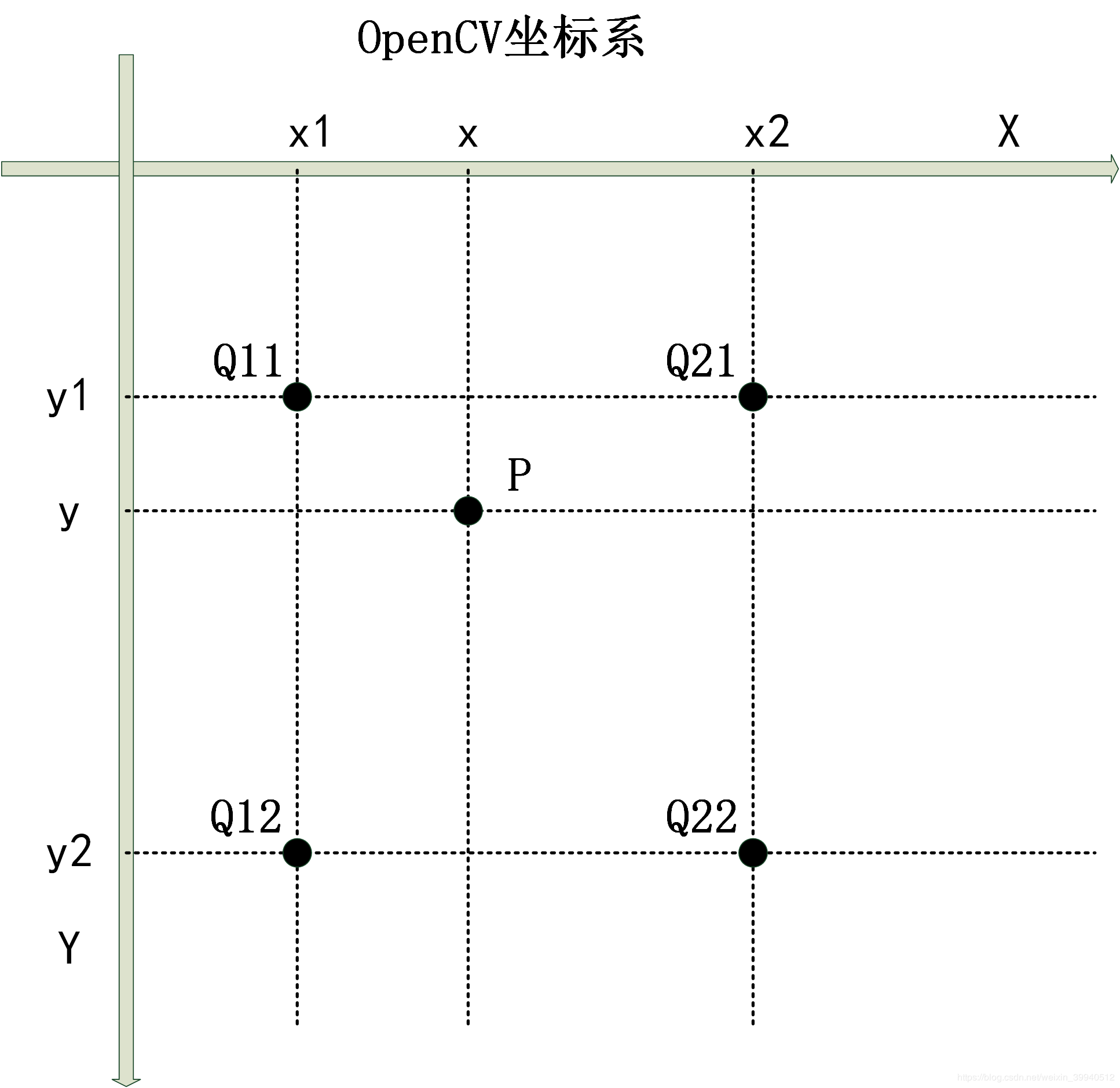
如上图所示,目标图像中的某点投影到原图像中的位置为点P,此时易知,.
一个例子:
如下图所示,将一幅3X3的图像放大到4X4,用表示目标图像,
表示原图像,我们有如下公式:
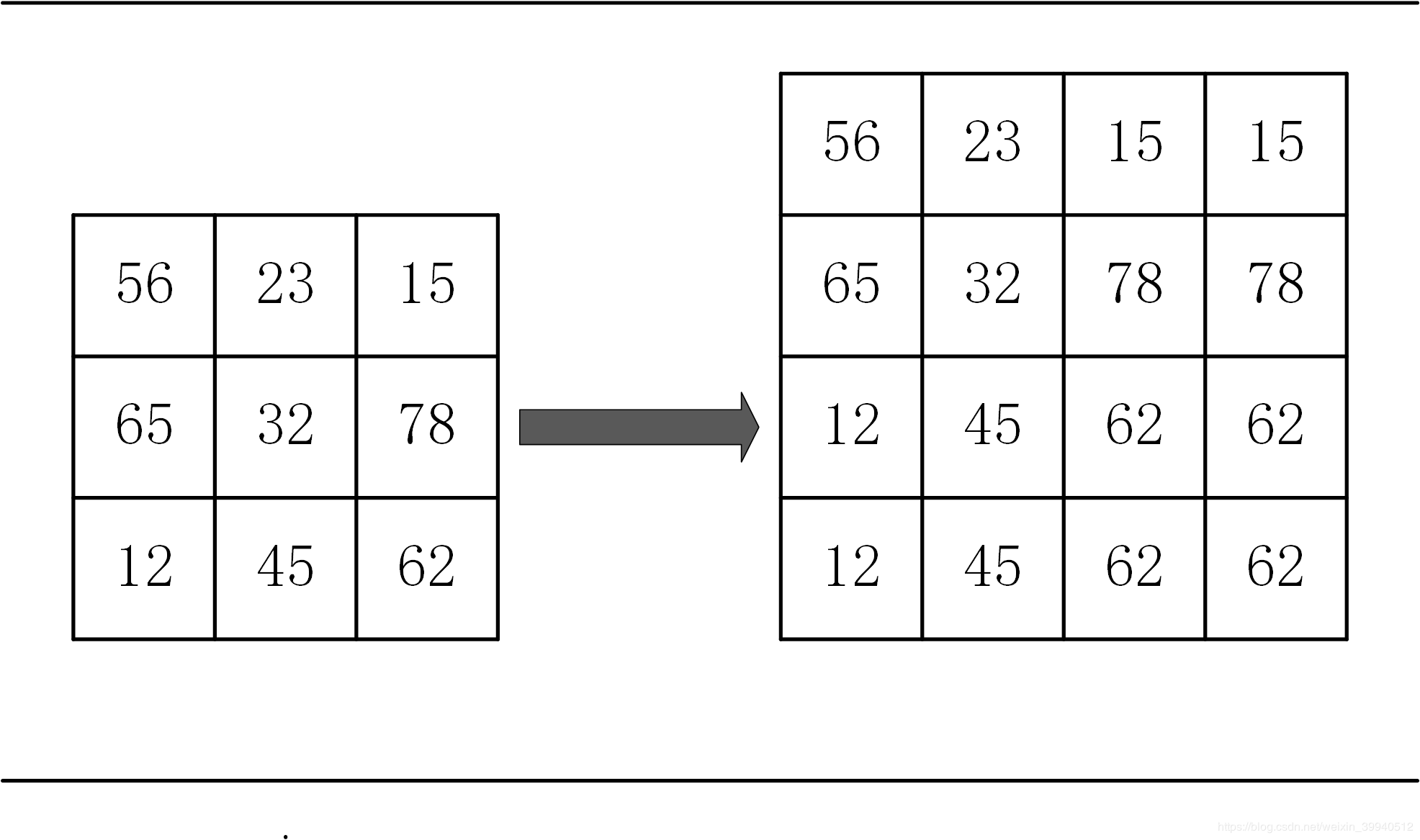
缺点:
用该方法作放大处理时,在图象中可能出现明显的块状效应
[图片上传失败...(image-3eee7e-1587461219520)]
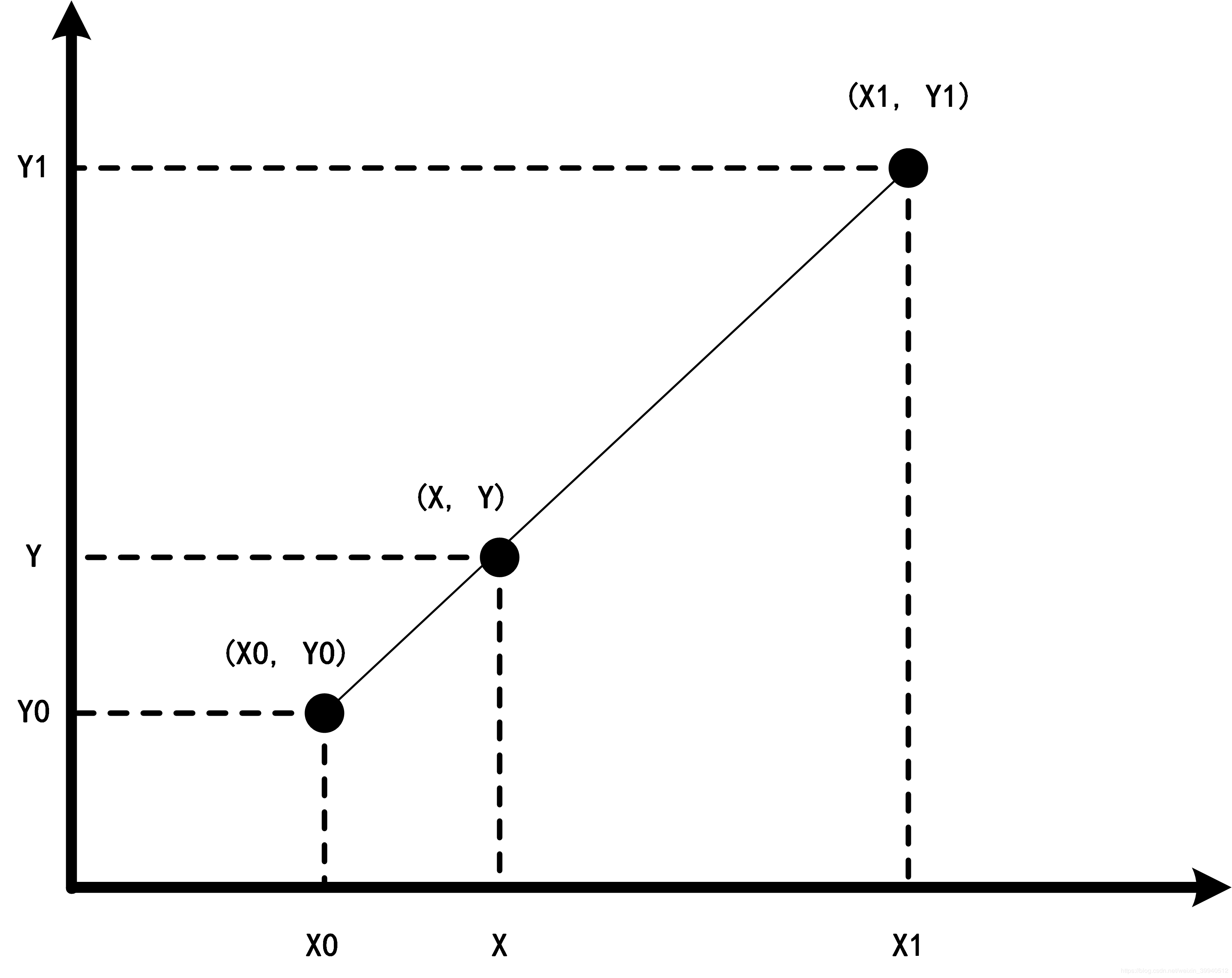
1.2 双线性插值
在讲双线性插值之前先看以一下线性插值,线性插值多项式为:
双线性插值就是线性插值在二维时的推广,在两个方向上做三次线性插值,具体操作如下图所示:
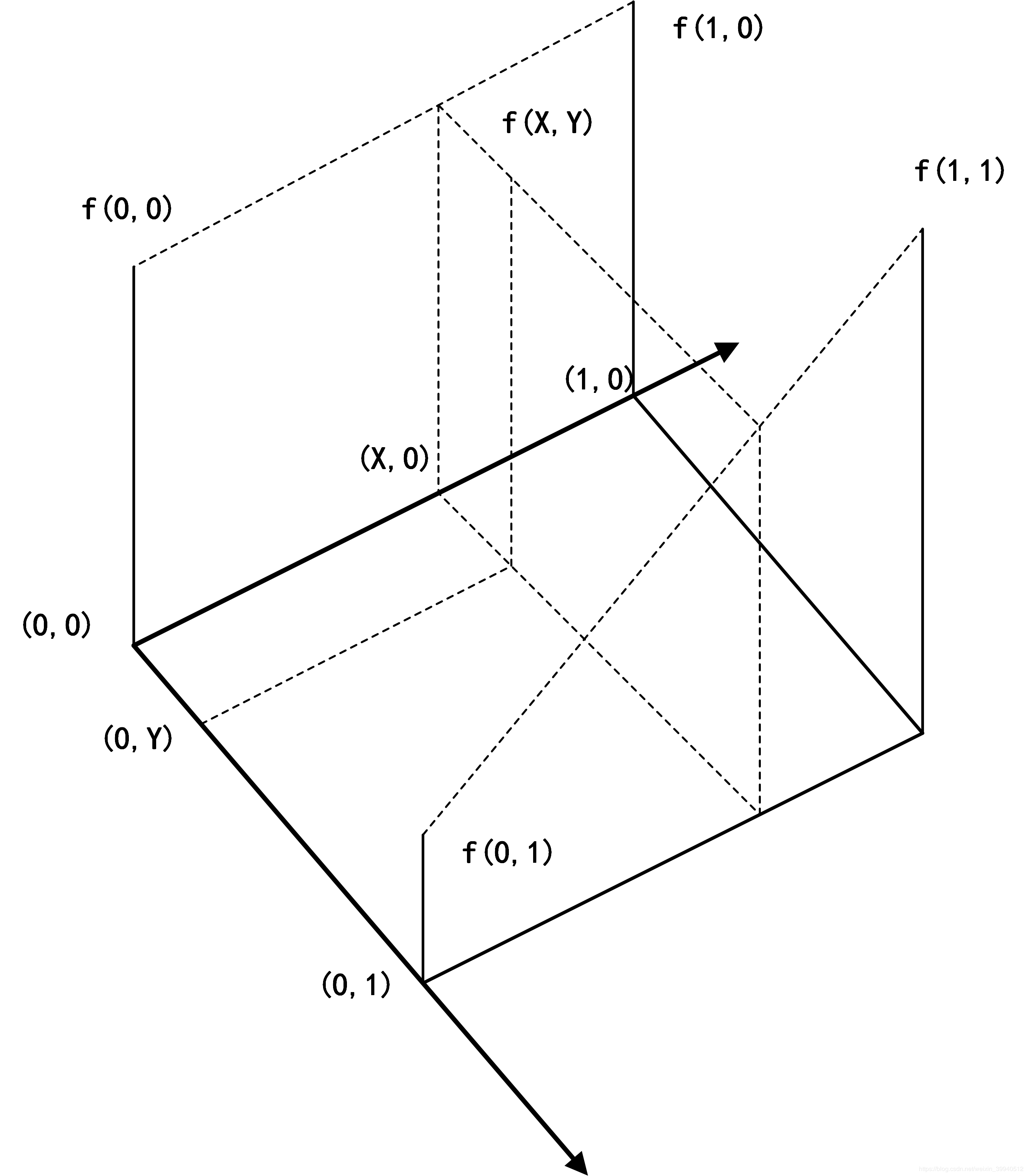
令为两个变量的函数,其在单位正方形顶点的值已知。假设我们希望通过插值得到正方形内任意点的函数值。则可由双线性方程:
来定义的一个双曲抛物面与四个已知点拟合。
首先对上端的两个顶点进行线性插值得:
类似地,再对底端的两个顶点进行线性插值有:
最后,做垂直方向的线性插值,以确定:
整理得:
1.3 映射方法
向前映射法
可以将几何运算想象成一次一个象素地转移到输出图象中。如果一个输入象素被映射到四个输出象素之间的位置,则其灰度值就按插值算法在4个输出象素之间进行分配。称为向前映射法,或象素移交影射。
注:从原图象坐标计算出目标图象坐标镜像、平移变换使用这种计算方法
向后映射法
向后映射法(或象素填充算法)是输出象素一次一个地映射回到输入象素中,以便确定其灰度级。如果一个输出象素被映射到4个输入象素之间,则其灰度值插值决定,向后空间变换是向前变换的逆。
注:从结果图象的坐标计算原图象的坐标
- 旋转、拉伸、放缩可以使用
- 解决了漏点的问题,出现了马赛克
2 OpenCV框架
Python
函数原型:
cv2.resize(src, dsize[, dst[, fx[, fy[, interpolation]]]])
参数:
| 参数 | 描述 |
|---|---|
| src | 【必需】原图像 |
| dsize | 【必需】输出图像所需大小 |
| fx | 【可选】沿水平轴的比例因子 |
| fy | 【可选】沿垂直轴的比例因子 |
| interpolation | 【可选】插值方式 |
插值方式:
| cv.INTER_NEAREST | 最近邻插值 |
| cv.INTER_LINEAR | 双线性插值 |
| cv.INTER_CUBIC | 基于4x4像素邻域的3次插值法 |
| cv.INTER_AREA | 基于局部像素的重采样 |
通常,缩小使用cv.INTER_AREA,放缩使用cv.INTER_CUBIC(较慢)和cv.INTER_LINEAR(较快效果也不错)。默认情况下,所有的放缩都使用cv.INTER_LINEAR。
代码实践:
import cv2
if __name__ == "__main__":
img = cv2.imread('D:/image/yuner.jpg', cv2.IMREAD_UNCHANGED)
print('Original Dimensions : ',img.shape)
scale_percent = 30 # percent of original size
width = int(img.shape[1] * scale_percent / 100)
height = int(img.shape[0] * scale_percent / 100)
dim = (width, height)
# resize image
resized = cv2.resize(img, dim, interpolation = cv2.INTER_LINEAR)
fx = 1.5
fy = 1.5
resized1 = cv2.resize(resized, dsize=None, fx=fx, fy=fy, interpolation = cv2.INTER_NEAREST)
resized2 = cv2.resize(resized, dsize=None, fx=fx, fy=fy, interpolation = cv2.INTER_LINEAR)
print('Resized Dimensions : ',resized.shape)
cv2.imshow("Resized image", resized)
cv2.imshow("INTER_NEAREST image", resized1)
cv2.imshow("INTER_LINEAR image", resized2)
cv2.waitKey(0)
cv2.destroyAllWindows()
0.3倍缩小,双线性插值

1.5倍放大,最近邻插值

1.5倍放大,双线性插值
















 338
338











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









