



磁轴键盘是一种利用霍尔效应进行触发的键盘,与传统的机械键盘有所不同。磁轴键盘的轴体采用了霍尔效应技术,可以更快速、更稳定地触发按键,同时也具有更高的耐用性和更长的使用寿命。它能够为每个按键单独设置灵敏度,充分满足个性化需求,为用户带来极致的使用体验。MST的霍尔系列MH481是磁轴键盘的首选!
一、霍尔传感器在键盘上的作用
霍尔效应传感器是一个换能器,将变化的磁场转化为输出电压的变化。霍尔传感器首先是实用于测量磁场,此外还可测量产生和影响磁场的物理量,例如被用于接近开关、霍尔、位置测量、转速测量和电流测量设备。

二、磁轴键盘原理
磁轴键盘是利用电磁原理,通过霍尔感应器与永磁铁感应来实现触发,从而提供更快速和更精准的触发体验。磁轴包括轴心、永磁铁、霍尔传感器和弹簧。当按键被按下时,磁铁会靠近霍尔传感器,感应到磁场的变化,导致霍尔电压超过阈值并触发相应的动作。松开时,按键原理磁体,磁性开关再次感应到磁场的变化,输入信号变化。

磁轴拆解图
三、MSTMH481线性霍尔传感器
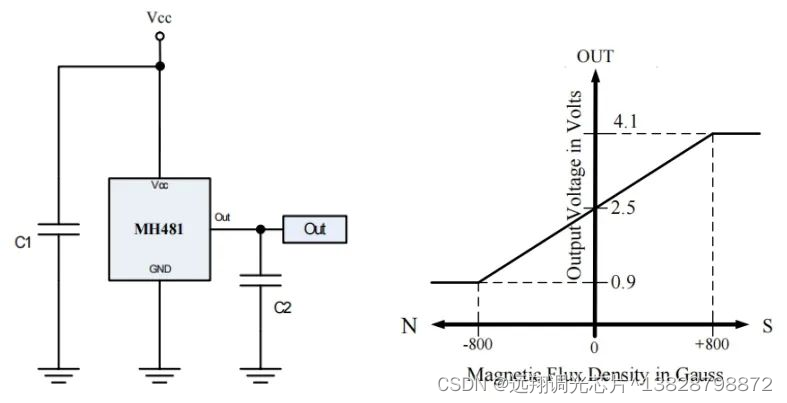
MST美伽科技针对磁轴键盘行业研发了几款超低功耗的高精度线性霍尔传感器,电磁摇杆专用的低功耗线性霍尔传感器。MH481是一种线性霍尔效应传感器,由霍尔传感器、线性放大器和图腾柱输出级组成。它具有低噪声输出,这使得不必要使用外部滤波。它还可以提高温度的稳定性和准确性。
➢工作电压范围:3-6.5V
➢5 VDC能耗2.5 mA
➢低噪声运行
➢线性输出为电路设计的灵活性
➢图腾柱,为一个稳定和准确的输出
➢对积极或消极的高斯反应的反应
➢封装:SOT23/TO-92S
四、总结
一款专为电磁摇杆设计的低功耗线性霍尔传感器,MH481霍尔效应传感器的高灵敏度可以精确地跟踪磁通量密度的极弱变化。线性电源输出电压由电源电压和磁通密度变化的比例设定。典型的工作电流为2.5 mA,工作电压范围为3.0伏至6.5伏。MH481的额定功率工作范围-40℃至+105℃之间运行。可用的四种包风格为大多数应用提供磁优化解决方案。包装类型SQ是一个DFN2020-3(0.5 mm标称高度),SD是一个DFN2020-6(0.6mm标称高度),ST是一个Tsot-23(0.7 mm标称高度)微型低轮廓表面安装包装,保证了稳定可靠的性能。
MST霍尔传感器厂家MH481线性霍尔元件,专为磁轴键盘设计。这款传感器具有高精度、低功耗等优点,可实现高灵敏度的位置检测,实现超低功耗,斩波稳定性设计使其具有高温度稳定性和高物理压力抗性,可在-40℃到+105℃温度范围内工作。适用于数字数码、电流传感、位置传感、电动机控制器等领域。
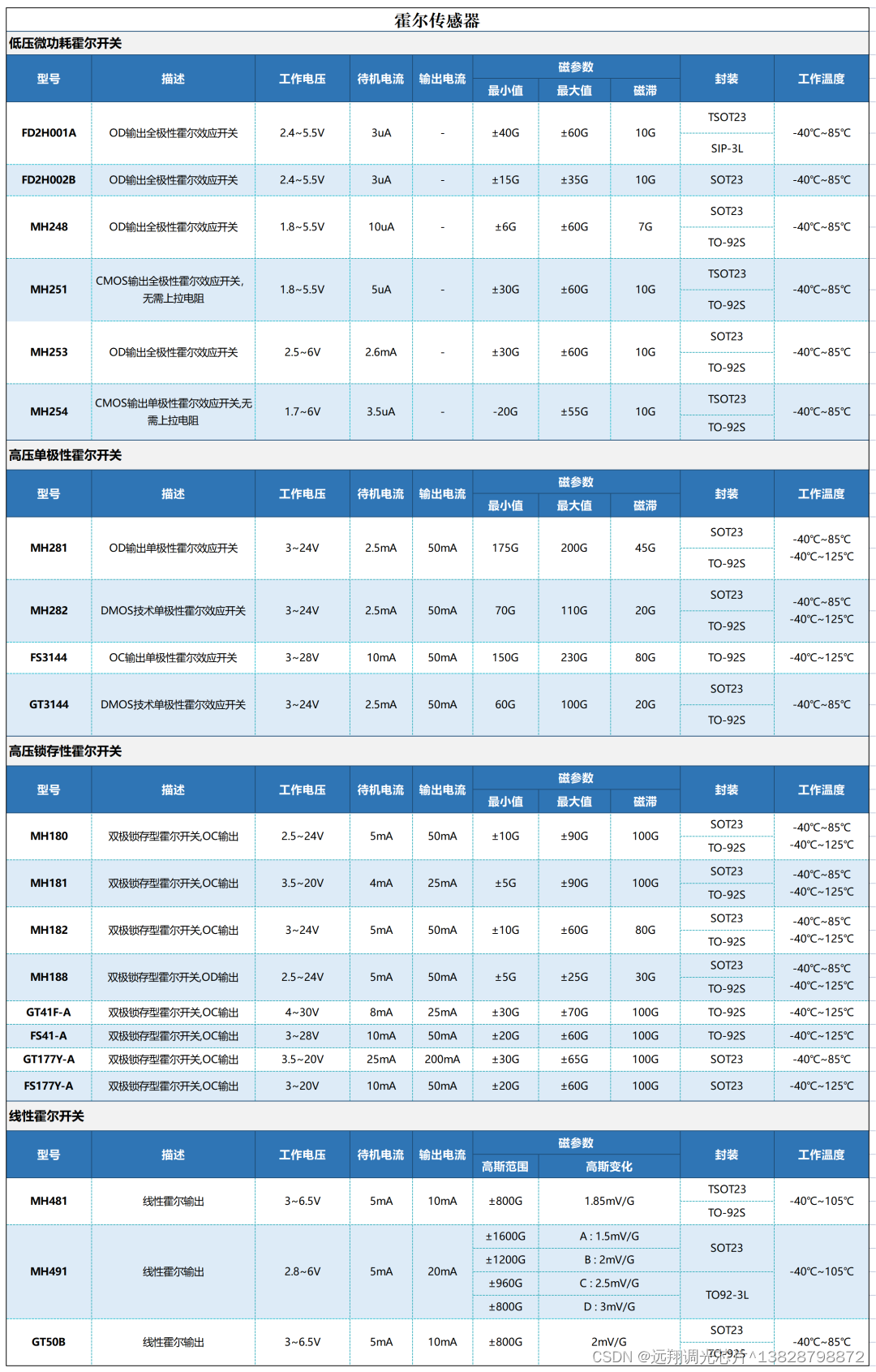
其他霍尔传感器IC:

















 1577
1577

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









