鉴客发表于 1-2 09:50 8个月前,
0回/1853阅
参考文献:
http://blog.csdn.net/luoshengyang/article/details/6573809
http://blog.csdn.net/hongtao_liu/article/details/6060734
建议阅读本文时先浏览以上两篇文章,本文是对上两篇文章在HAL对上层接口话题的一个总结.
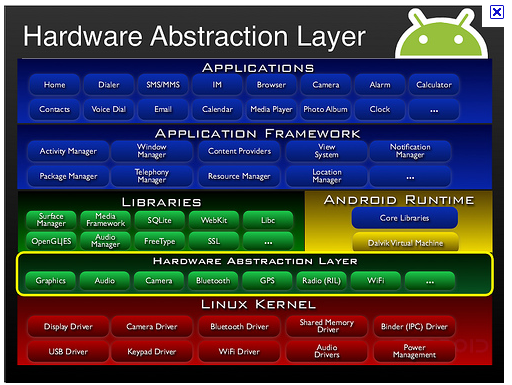
1 什么是HAL
HAL的全称是Hardware Abstraction Layer,即硬件抽象层.其架构图如下:
Android的HAL是为了保护一些硬件提供商的知识产权而提出的,是为了避开linux的GPL束缚。思路是把控制硬件的动作都放到了 Android HAL中,而linux driver仅仅完成一些简单的数据交互作用,甚至把硬件寄存器空间直接映射到user space。而Android是基于Aparch的license,因此硬件厂商可以只提供二进制代码,所以说Android只是一个开放的平台,并不是一个开源的平台。也许也正是因为Android不遵从GPL,所以Greg Kroah-Hartman才在2.6.33内核将Andorid驱动从linux中删除。GPL和硬件厂商目前还是有着无法弥合的裂痕。Android 想要把这个问题处理好也是不容易的。
总结下来,Android HAL存在的原因主要有:
1. 并不是所有的硬件设备都有标准的linux kernel的接口
2. KERNEL DRIVER涉及到GPL的版权。某些设备制造商并不原因公开硬件驱动,所以才去用HAL方式绕过GPL。
3. 针对某些硬件,Android有一些特殊的需求.
2 与接口相关的几个结构体
首先来看三个与HAL对上层接口有关的几个结构体:
2 | struct hw_module_methods_t; |
这几个数据结构是在Android工作目录/hardware/libhardware/include/hardware/hardware.h文件中定义.
3 解释
一般来说,在写HAL相关代码时都得包含这个hardware.h头文件,所以有必要先了解一下这个头文件中的内容.
017 | #ifndef ANDROID_INCLUDE_HARDWARE_HARDWARE_H |
018 | #define ANDROID_INCLUDE_HARDWARE_HARDWARE_H |
021 | #include <sys/cdefs.h> |
023 | #include <cutils/native_handle.h> |
024 | #include <system/graphics.h> |
032 | #define MAKE_TAG_CONSTANT(A,B,C,D) (((A) << 24) | ((B) << 16) | ((C) << 8) | (D)) |
034 | #define HARDWARE_MODULE_TAG MAKE_TAG_CONSTANT('H', 'W', 'M', 'T') |
035 | #define HARDWARE_DEVICE_TAG MAKE_TAG_CONSTANT('H', 'W', 'D', 'T') |
038 | struct hw_module_methods_t; |
047 | typedef struct hw_module_t { |
052 | uint16_t version_major; |
055 | uint16_t version_minor; |
068 | struct hw_module_methods_t* methods; |
074 | uint32_t reserved[32-7]; |
078 | typedef struct hw_module_methods_t { |
080 | int (*open)(const struct hw_module_t* module, const char* id, |
081 | struct hw_device_t** device); |
082 | } hw_module_methods_t; |
089 | typedef struct hw_device_t { |
097 | struct hw_module_t* module; |
100 | uint32_t reserved[12]; |
103 | int (*close)(struct hw_device_t* device); |
110 | #define HAL_MODULE_INFO_SYM HMI |
115 | #define HAL_MODULE_INFO_SYM_AS_STR "HMI" |
122 | int hw_get_module(const char *id, const struct hw_module_t **module); |
136 | int hw_get_module_by_class(const char *class_id, const char *inst, |
137 | const struct hw_module_t **module); |
141 | #endif /* ANDROID_INCLUDE_HARDWARE_HARDWARE_H */ |
由以上内容可以看出(typedef struct hw_module_t ,typedef struct hw_device_t),如果我们要写一个自定义设备的驱动的HAL层时,我们得首先自定义两个数据结构:
假设我们要做的设备名为XXX:
在头文件中定义:XXX.h
02 | #define XXX_HARDWARE_MODULE_ID "XXX" |
08 | struct hw_module_t common; |
14 | struct hw_device_t common; |
17 | int (*set_val)(struct xxx_device_t* dev, int val); |
18 | int (*get_val)(struct xxx_device_t* dev, int* val); |
注:特别注意xxx_device_t的结构定义,这个才是HAL向上层提供接口函数的数据结构,其成员就是我们想要关心的接口函数.
接下来我们在实现文件XXX.c文件中定义一个xxx_module_t的变量:
02 | struct xxx_module_t HAL_MODULE_INFO_SYM = { |
05 | tag: HARDWARE_MODULE_TAG, |
08 | id: XXX_HARDWARE_MODULE_ID, |
10 | author: MODULE_AUTHOR, |
11 | methods: &xxx_module_methods, |
注意到上面有HAL_MODULE_INFO_SYM变量的成员common中包含一个函数列表xxx_module_methods,而这个成员函数列表是在本地自定义的。那么这个成员函数列是不是就是HAL向上层提供函数的地方呢?很失望,不是在这里,前面我们已经说过了,是在 xxx_device_t中定义的,这个xxx_module_methods实际上只提供了一个open函数,就相当于只提供了一个模块初始化函数.其定义如下:
2 | static struct hw_module_methods_t xxx_module_methods = { |
注意到,上边的函数列表中只列出了一个xxx_device_open函数,这个函数也是需要在本地实现的一个函数。前面说过,这个函数只相当于模块初始化函数。
那么HAL又到底是怎么将xxx_device_t中定义的接口提供到上层去的呢?
且看上面这个函数列表中唯一的一个xxx_device_open的定义:
01 | static int xxx_device_open(const struct hw_module_t* module, const char* name, struct hw_device_t** device) { |
02 | struct xxx_device_t* dev; |
03 | dev = (struct hello_device_t*)malloc(sizeof(struct xxx_device_t)); |
06 | LOGE("Hello Stub: failed to alloc space"); |
10 | memset(dev, 0, sizeof(struct xxx_device_t)); |
12 | dev->common.tag = HARDWARE_DEVICE_TAG; |
13 | dev->common.version = 0; |
14 | dev->common.module = (hw_module_t*)module; |
15 | dev->common.close = xxx_device_close; |
17 | dev->set_val = xxx_set_val; |
18 | dev->get_val = xxx_get_val; |
20 | if((dev->fd = open(DEVICE_NAME, O_RDWR)) == -1) { |
21 | LOGE("Hello Stub: failed to open /dev/hello -- %s.", strerror(errno)); |
27 | *device = &(dev->common); |
28 | LOGI("Hello Stub: open /dev/hello successfully."); |
经验告诉我们,一般在进行模块初始化的时候,模块的接口函数也会“注册”,上面是模块初始化函数,那么接口注册在哪?于是我们找到*device =&(dev->common);这行代码,可问题是,这样一来,返回给调用者不是&(dev->common)吗?而这个 dev->common仅仅只包含了一个模块关闭接口!到底怎么回事?为什么不直接返回dev,dev下不是提供所有HAL向上层接口吗?
在回答上述问题之前,让我们先看一下这xxx_device_open函数原型,还是在hardware.h头文件中,找到下面几行代码:
1 | typedef struct hw_module_methods_t { |
3 | int (*open)(const struct hw_module_t* module, const char* id, |
4 | struct hw_device_t** device); |
这是方法列表的定义,明确要求了方法列表中有且只一个open方法,即相当于模块初始化方法,且,这个方法的第三个参数明确指明了类型是struct hw_device_t **,而不是用户自定义的xxx_device_t,这也就是解译了在open函数实现内为什么输出的是&(dev->common)而不是dev了,原来返回的类型在hardware.h中的open函数原型中明确指出只能返回hw_device_t类型.
可是,dev->common不是只包含close接口吗?做为HAL的上层,它又是怎么"看得到"HAL提供的全部接口的呢?
接下来,让我们来看看做为HAL上层,它又是怎么使用由HAL返回的dev->common的:
参考: 在Ubuntu为Android硬件抽象层(HAL)模块编写JNI方法提供Java访问硬件服务接口 这篇文章,从中可以看到这么几行代码:
2 | static inline int hello_device_open(const hw_module_t* module, struct hello_device_t** device) { |
3 | return module->methods->open(module, HELLO_HARDWARE_MODULE_ID, (struct hw_device_t**)device); |
由此可见,返回的&(dev->common)最终会返回给struce hello_device_t **类型的输出变量device,换句话说,类型为hw_device_t的dev->common在初始化函数open返回后,会强制转化为 xxx_device_t来使用,终于明白了,原来如此!另外,在hardware.h中对xxx_device_t类型有说明,要求它的
第一个成员的类型必须是hw_device_t,原来是为了HAL上层使用时的强制转化的目的,如果xxx_device_t的第一个成员类型不是hw_device_t,那么HAL上层使用中强制转化就没有意义了,这个时候,就真的“看不到”HAL提供的接口了.
此外,在hardware.h头文件中,还有明确要求定义xxx_module_t类型时,明确要求第一个成员变量类型必须为hw_module_t,这也是为了方便找到其第一个成员变量common,进而找到本地定义的方法列表,从而调用open函数进行模块初始化.
综上所述,HAL是通过struct xxx_device_t这个结构体向上层提供接口的.
即:接口包含在struct xxx_device_t这个结构体内。
而具体执行是通过struct xxx_module_t HAL_MODULE_INFO_SYM这个结构体变量的函数列表成员下的open函数来返回给上层的.
文章出处:http://blog.csdn.net/flydream0/article/details/7086273
























 2165
2165

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









