







 Arduino串口监视器是用于调试与计算机间串口通讯的工具,显示发送/接收数据。数据传输包括起始位、数据位(通常8位)、停止位(通常1位)和校验位(可选)。常用方法如设置波特率、开始/结束串口通信、读写数据等。Serial类提供了多种函数,如print()、println()、read()等,便于数据交互。
Arduino串口监视器是用于调试与计算机间串口通讯的工具,显示发送/接收数据。数据传输包括起始位、数据位(通常8位)、停止位(通常1位)和校验位(可选)。常用方法如设置波特率、开始/结束串口通信、读写数据等。Serial类提供了多种函数,如print()、println()、read()等,便于数据交互。
Arduino串口监视器是配置于Arduino IDE内部的一个工具,主要作用是监视和调试Arduino和计算机之间的串口通讯,具体是将Arduino发送/接收的数据显示出来,必要时能手动写入数据。
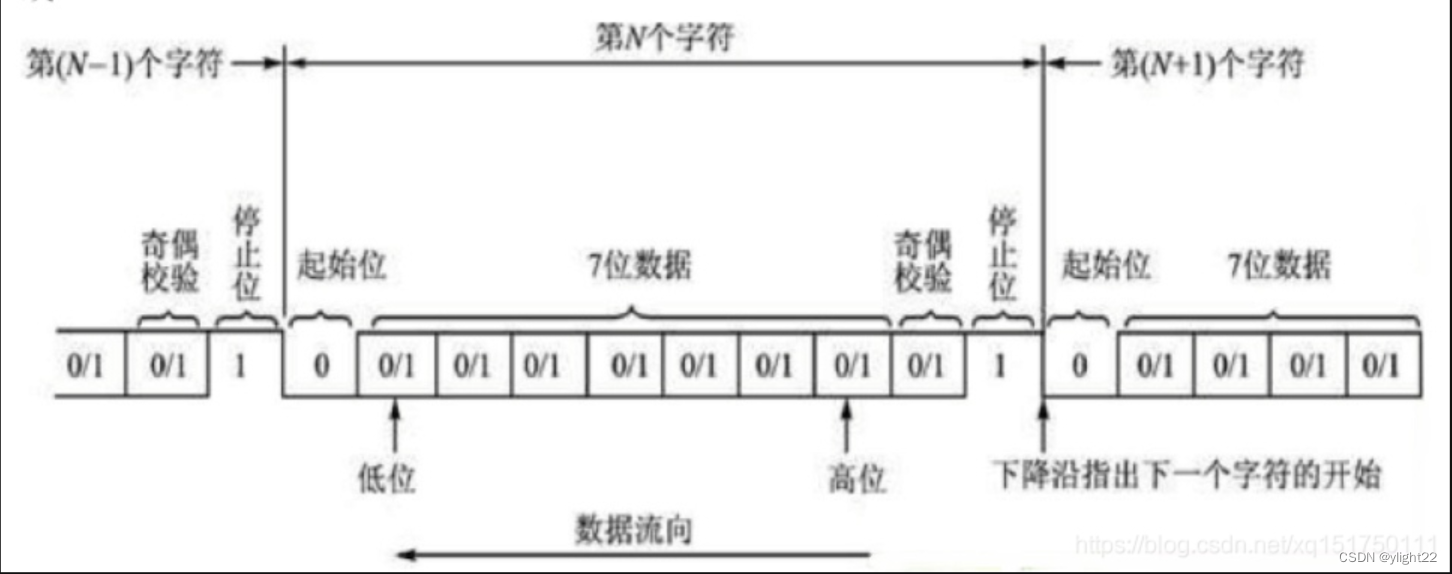
当Arduino输出数据时,已知串口通信是遵循一定的协议的,那么输出的这些信号/数据也会有相应的格式,如下图所示:
以下是几个常用参数:
1、起始位:总是低电平,是一组数据帧开始的信号
2、数据位:一般为8位,指定传输的数据位数;
3、 停止位:一般为1位,总是高电平,指定传输结束的位置;
4、校验位:用于在传输过程中检查数据是否正确,一般可选择无校验(Arduino默认)、奇偶校验、偶校验、和校验、空格校验等;
以上4个参数组成(如图所示)在数据传输过程中的一个单位,称为数据帧,也是数据传输的格式。
当然除此之外,串口监视器还有别的参数如:波特率------用于指定数据传输的速
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









