










KUKA机械臂配置PROFINET
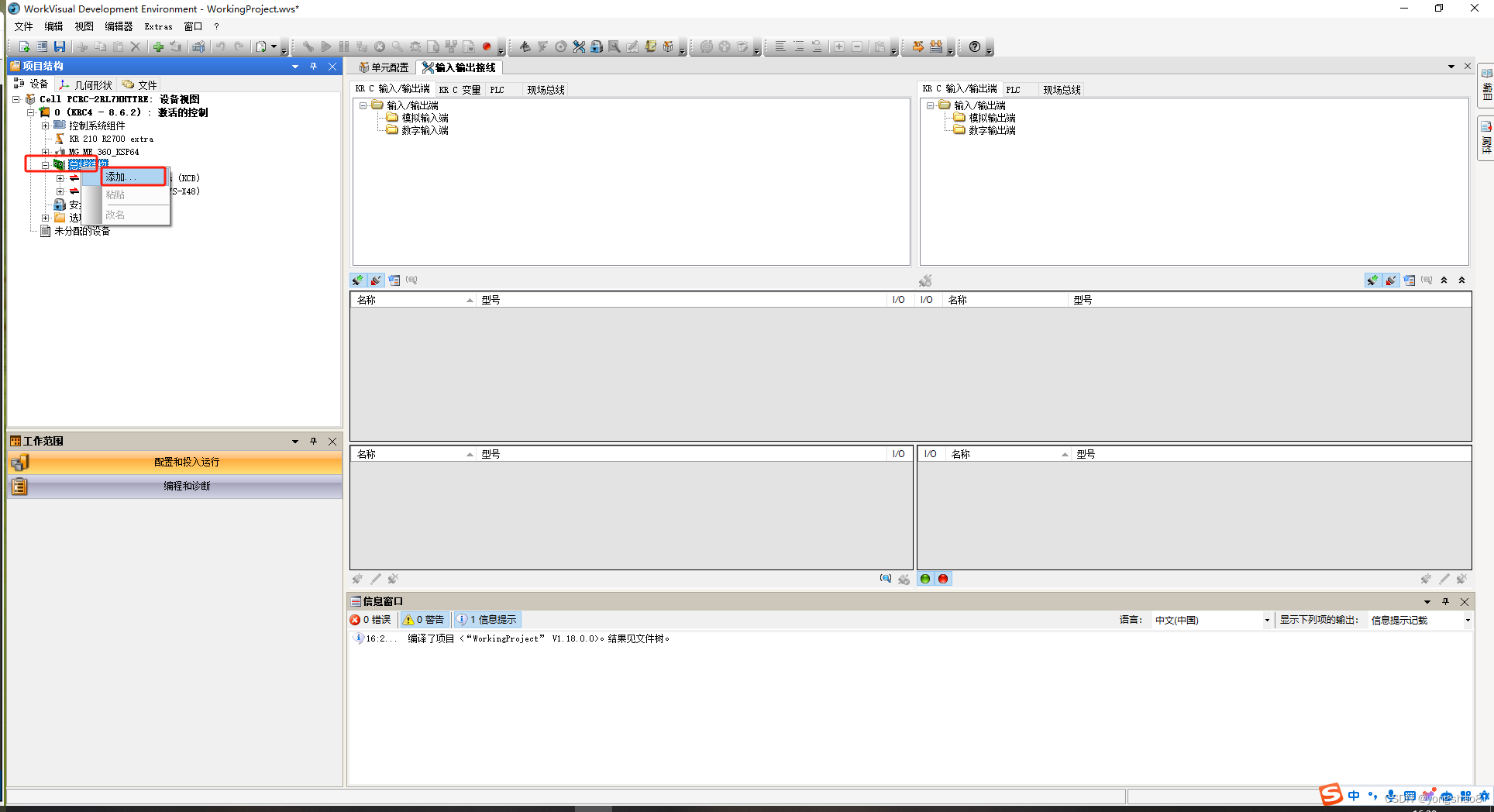
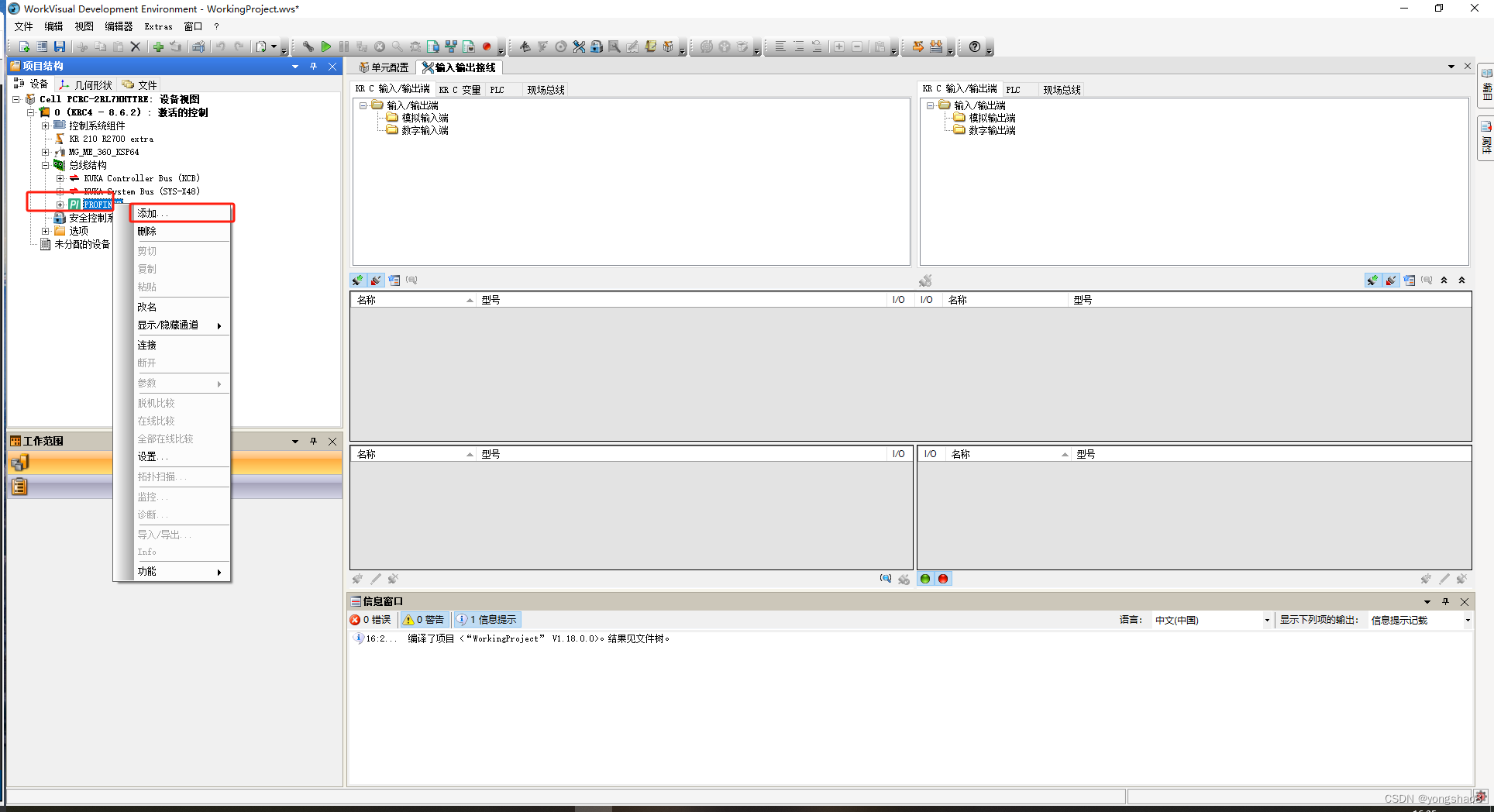
1、Work Visual打开项目,添加DTM选项–PROFINET
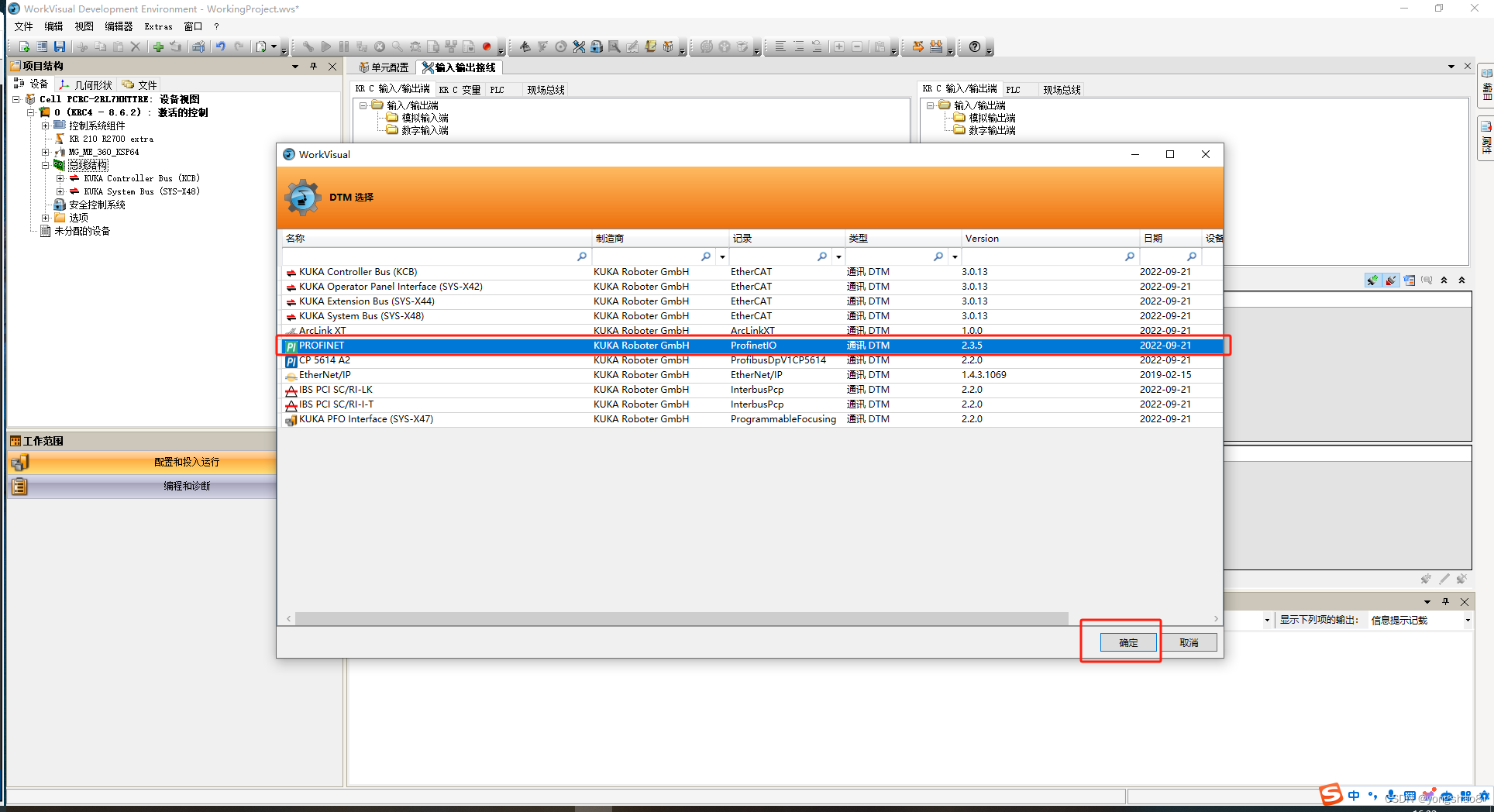
鼠标右键点击总线结构–选择添加选择需要添加的选项PROFINET。
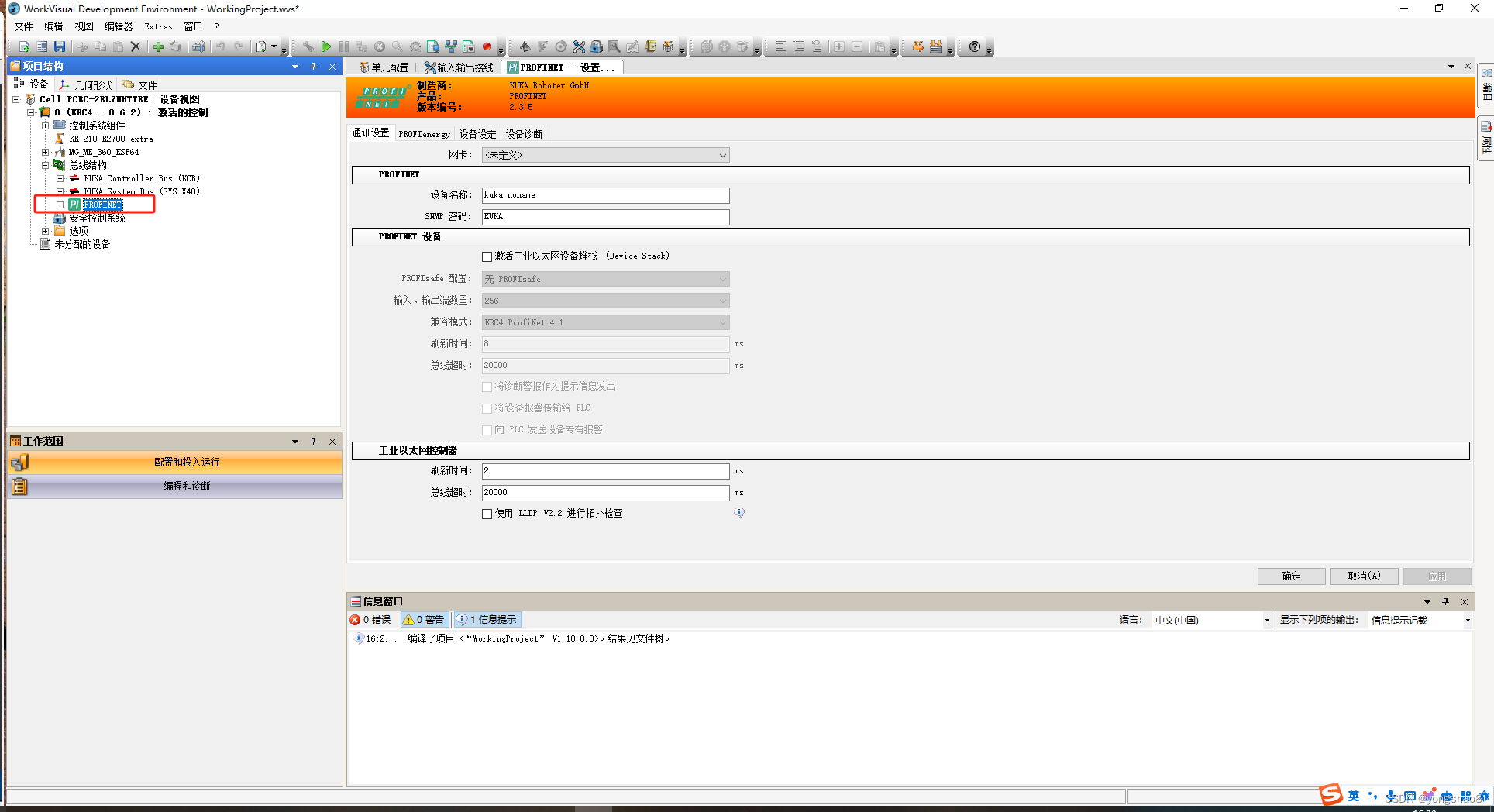
2、配置PROFINET设置–通讯设置
鼠标左键双击PROFINET,会出现PROFINET设置页面。
通讯设置页面:
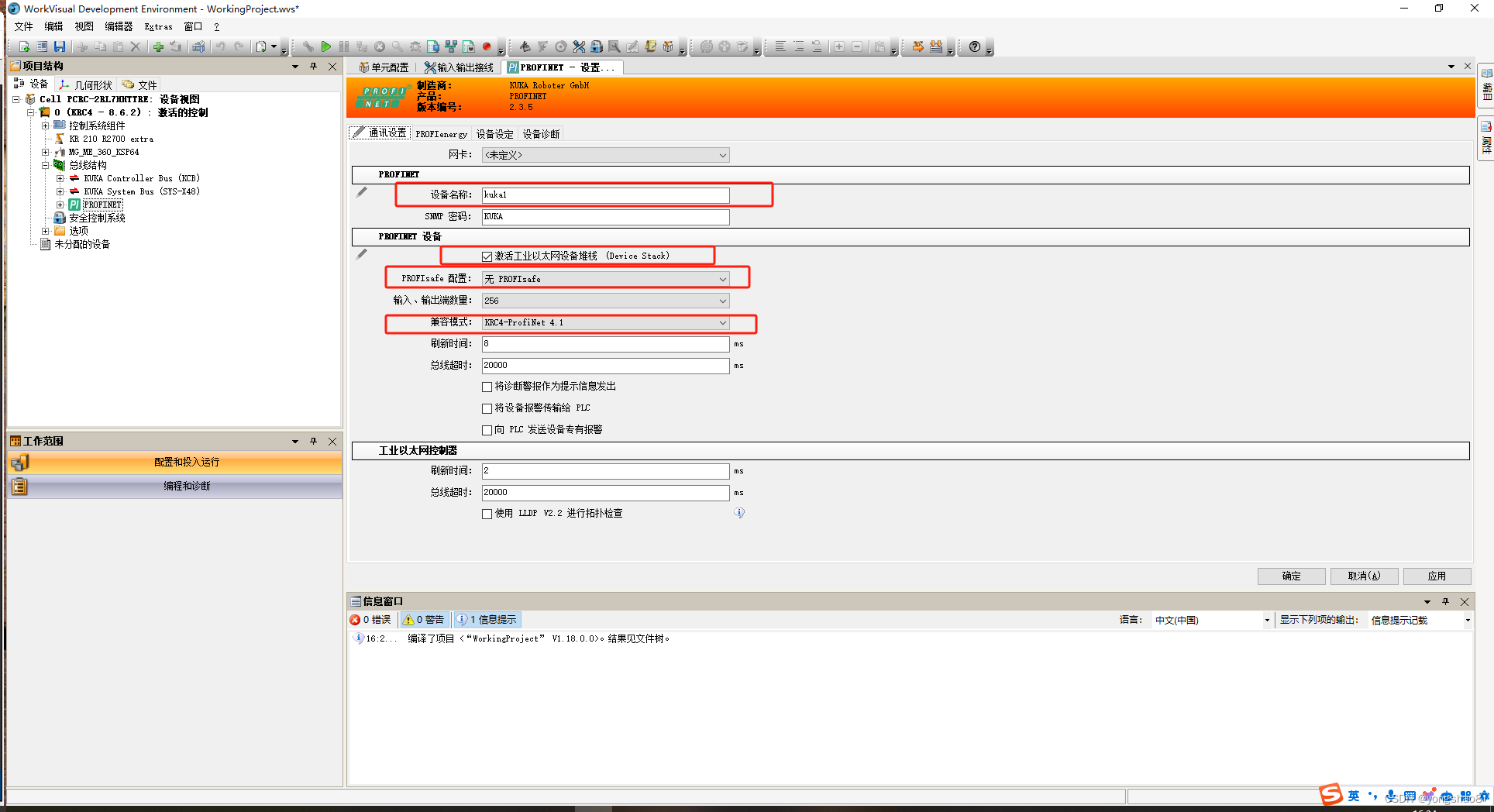
设备名称:PROFINET设备名称,自定义修改。
激活工业以太网设备堆栈(Device Stack):勾选上。
PROFIsafe配置:我这里选的无。
输入输出端数量:我用的默认256 。
兼容模式:我选择的是KRC4-ProfiNet 4.1 。
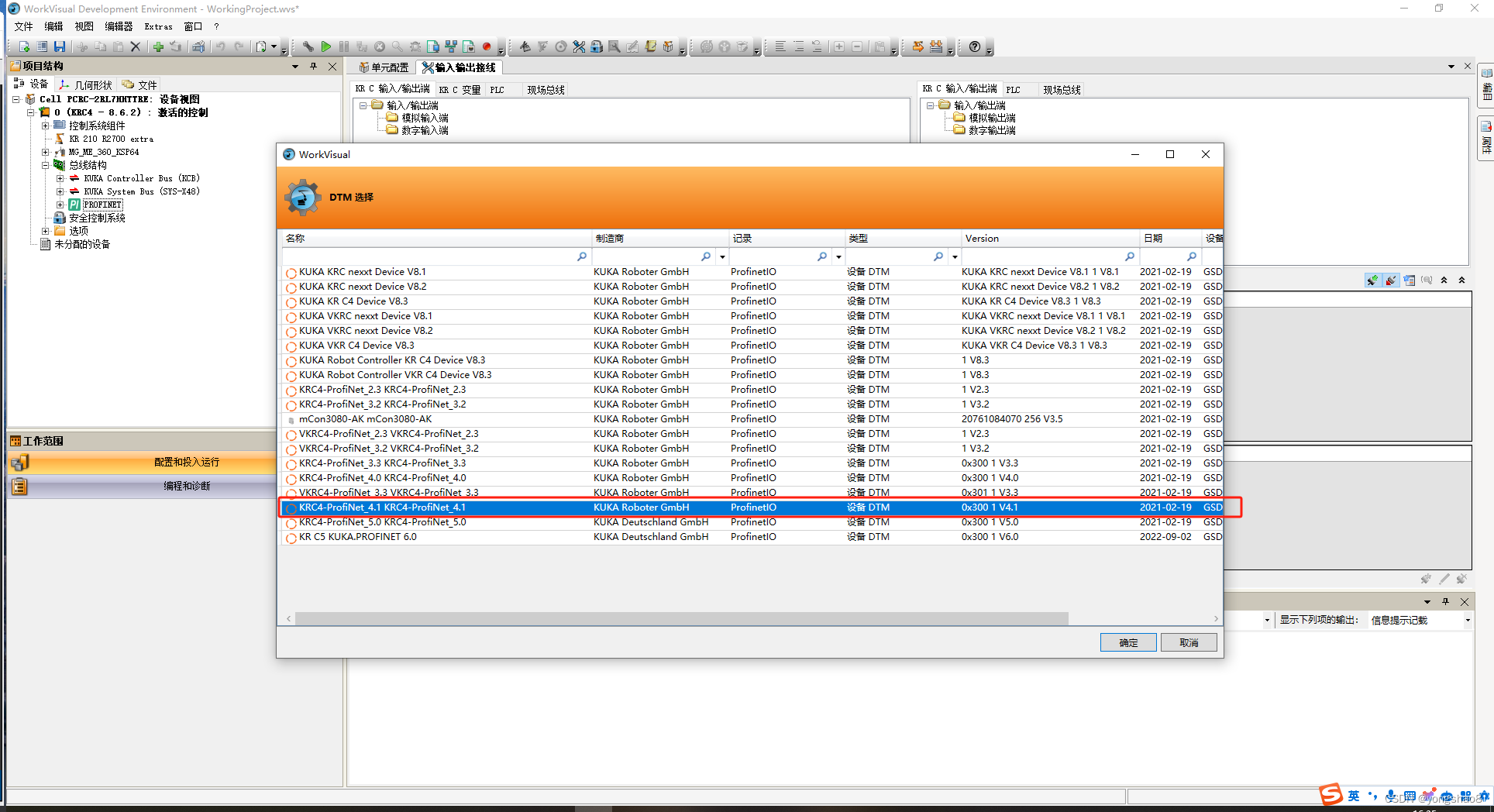
3、添加对应的PROFINET版本
鼠标右键PROFINET–点击添加–选择KRC4-ProfiNet_4.1(与上一步中兼容模式选择相同的设备版本)。
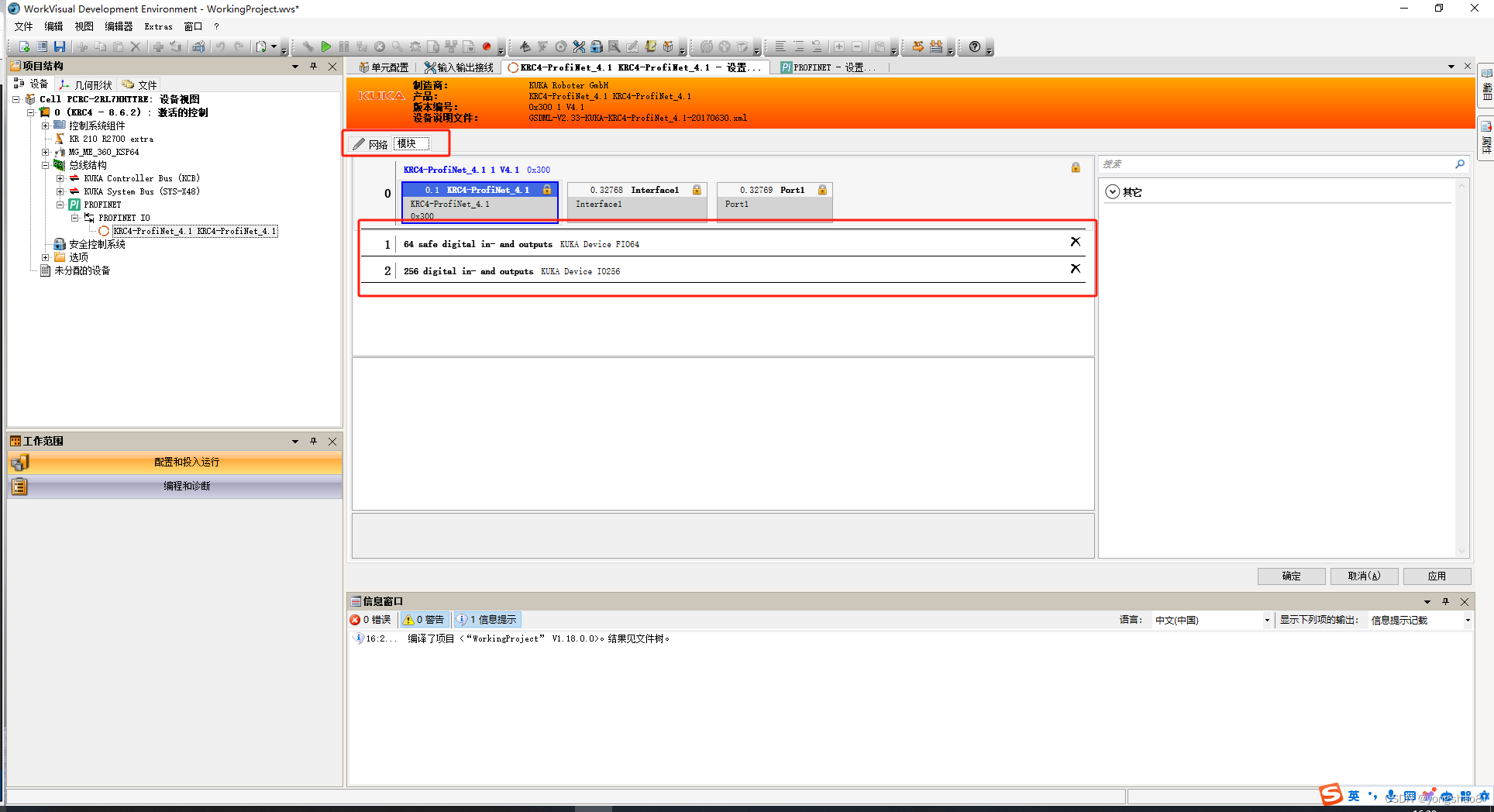
4、KRC4-ProfiNet_4.1的模块配置
鼠标左键双击KRC4-ProfiNet_4.1,会出现KRC4-ProfiNet_4.1设置页面。
网络页面:
IP地址:与西门子plc组态的地址一致
子网掩码:与西门子plc组态的地址一致

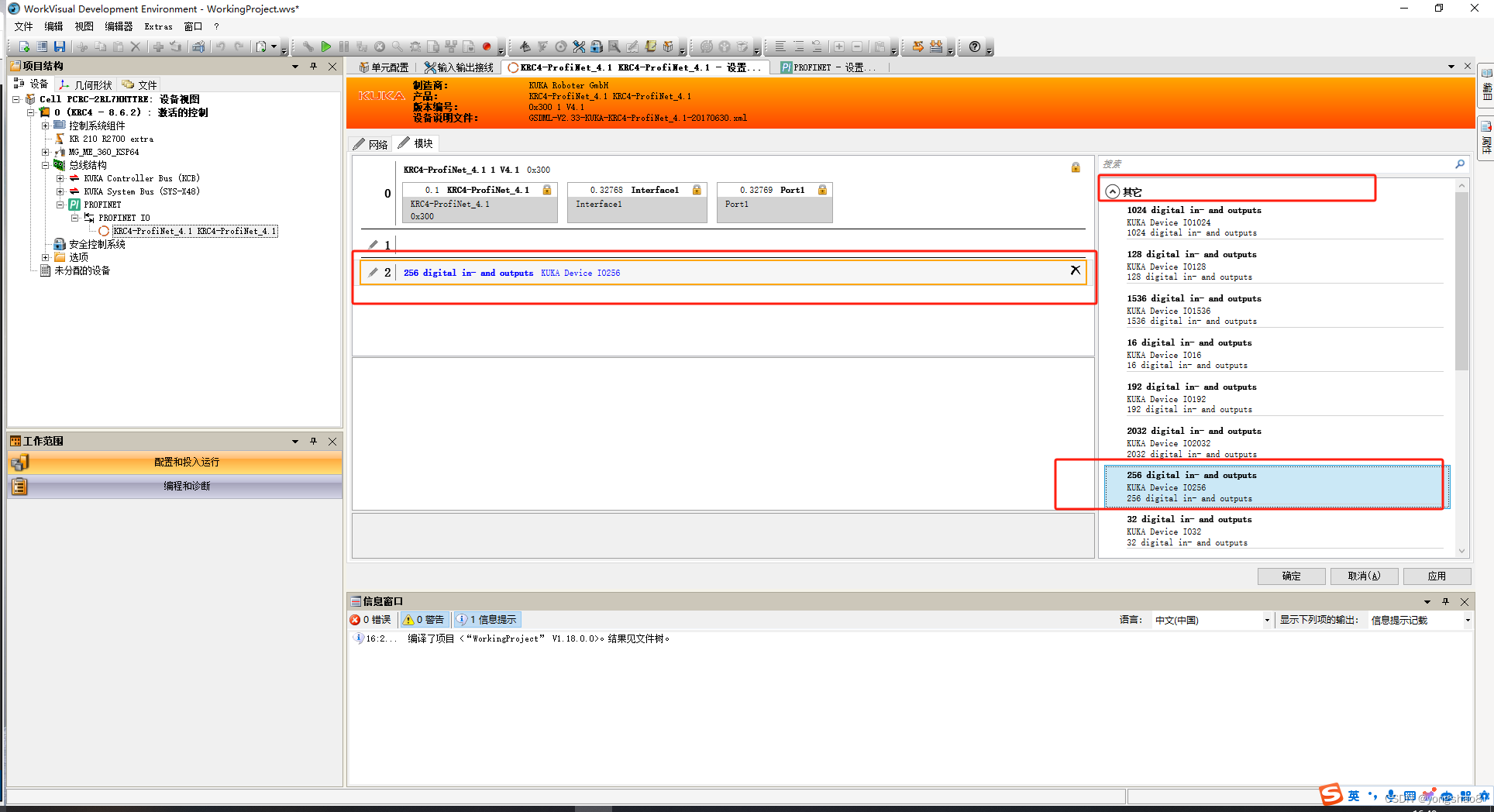
模块页面:
插槽1和2,根据自己前面第2步中的设置选择相应的设备。
插槽1:没有PROFIsafe,所以我直接删除了。
插槽2:数字输入和数字输出都是256个数量,选择256 digital in- and outputs。
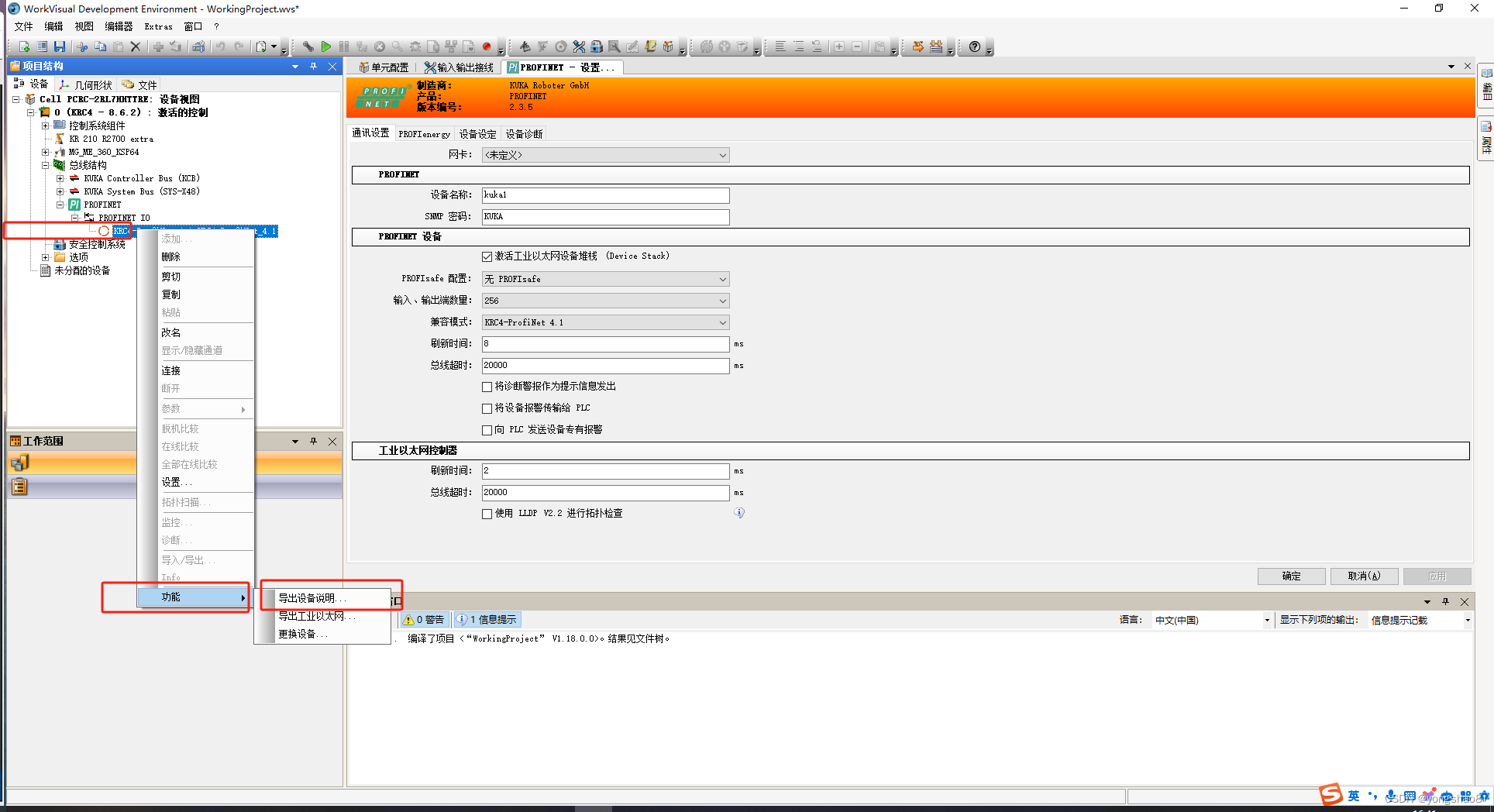
5、导出设备说明文件(xml文件)
鼠标右键点击KRC4-ProfiNet_4.1–选择功能–点击导出设备说明。
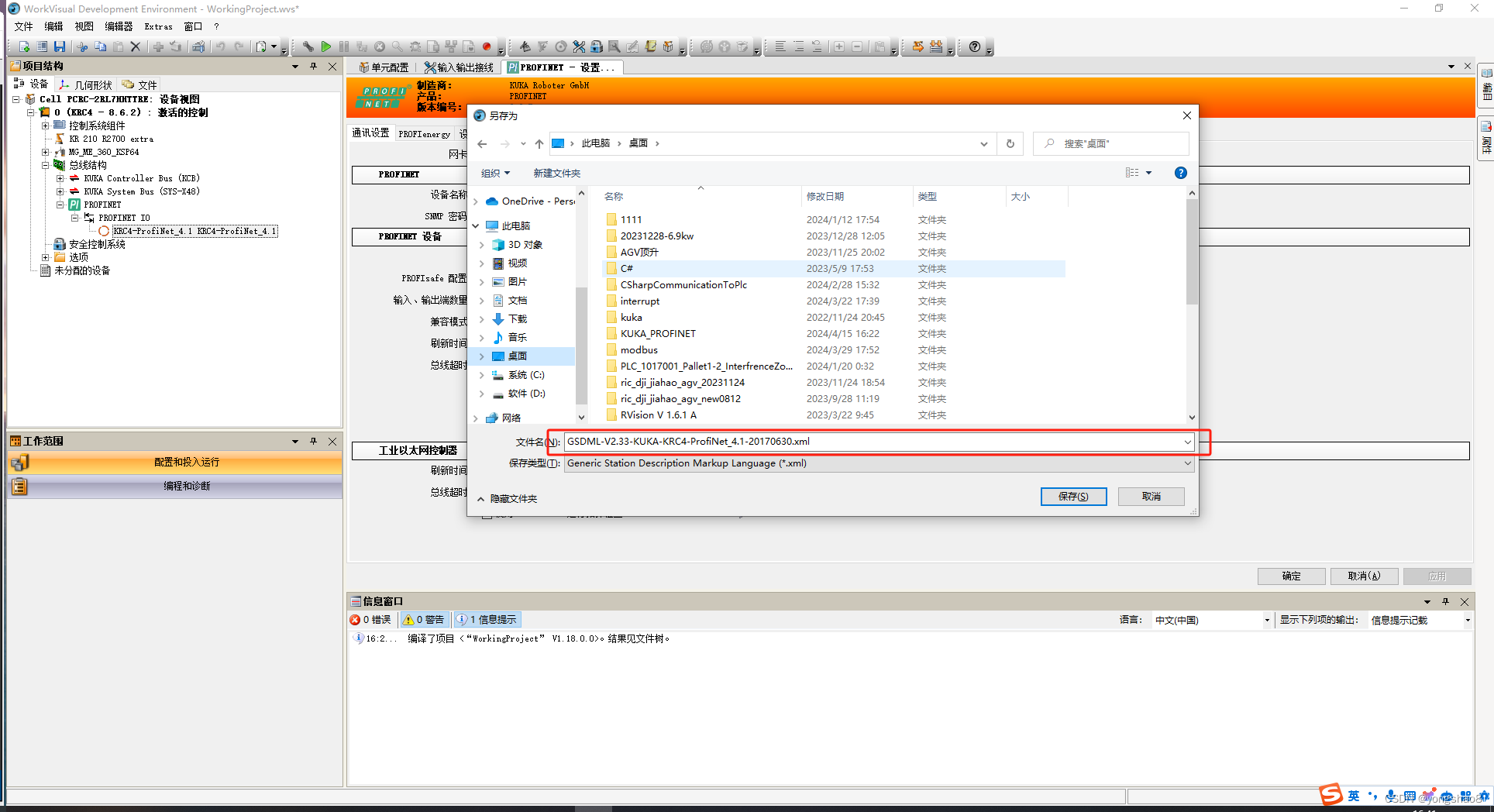
导出的xml文件可以在西门子博图软件安装,安装成功后,组态的时候就可以添加kuka机械臂的组态了。
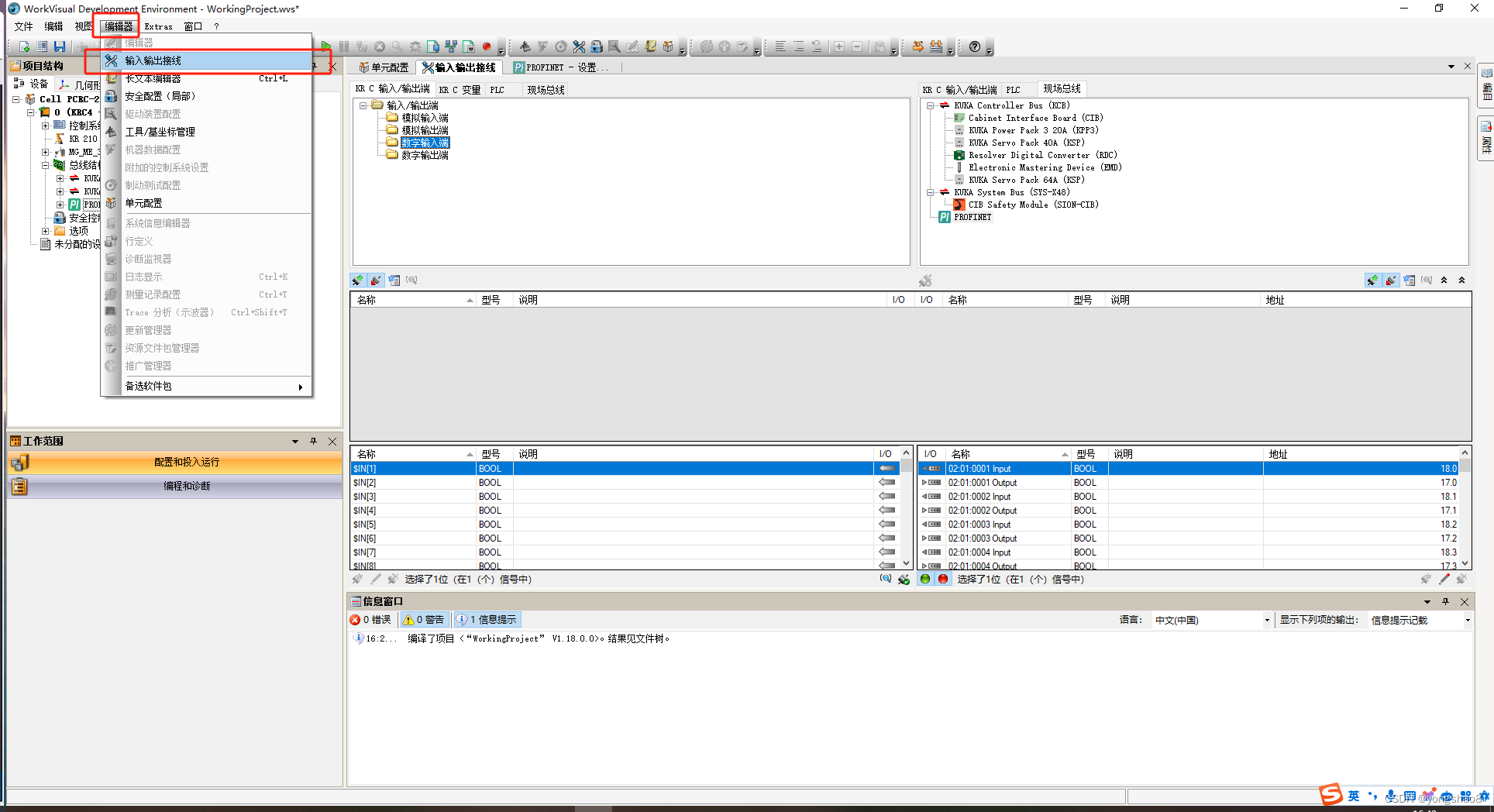
6、IO映射
设备说明文件导出之后,删除之前添加的KRC4-ProfiNet_4.1。
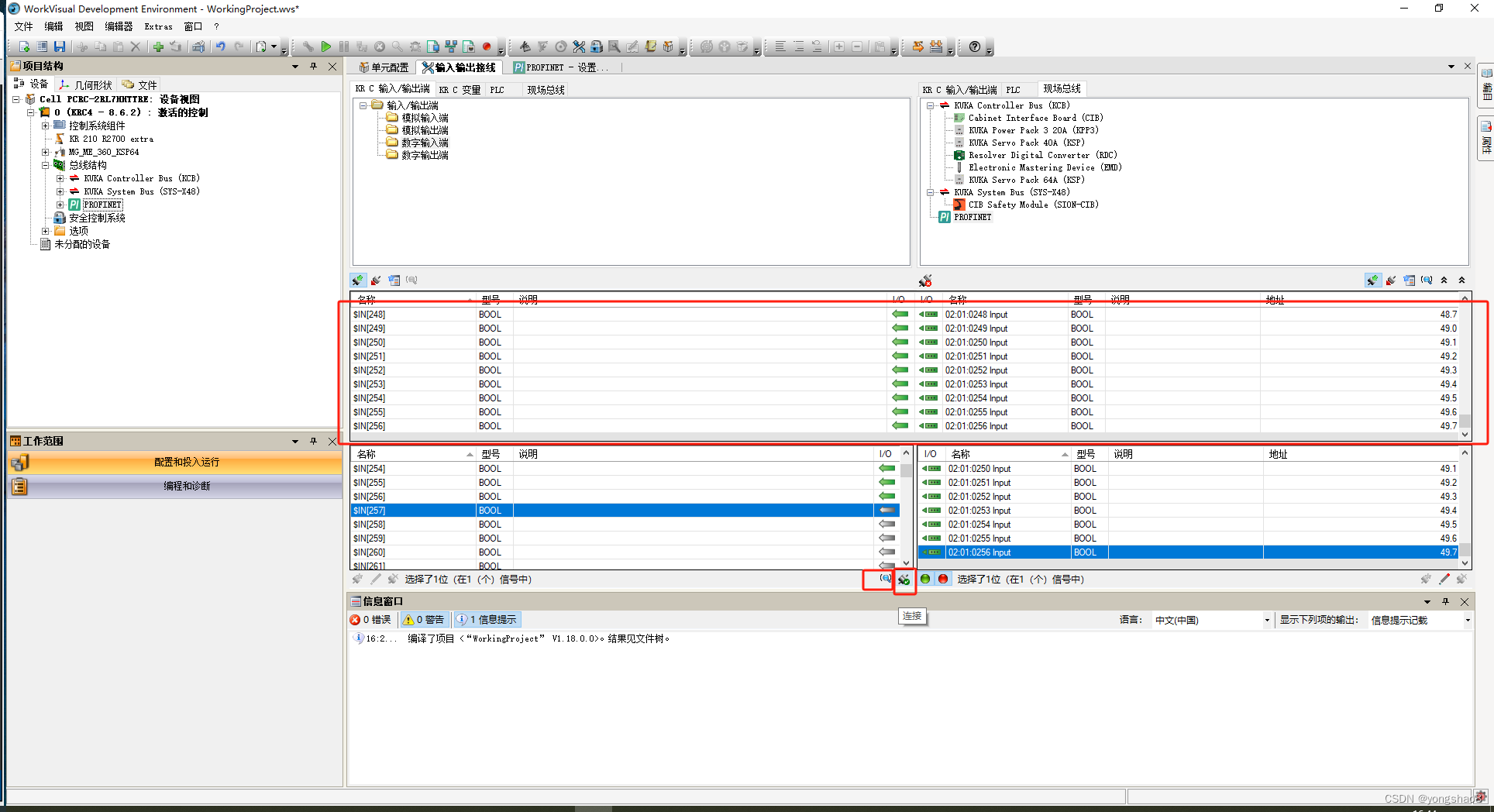
点击编辑器–选择输入输出接线,会出现IO映射界面。
输入输出接线页面,左侧页面选择KRC输入/输出端,右侧页面选择现场总线。
下图红框中绿色的为输入端过滤器,红色的为输出端过滤器。
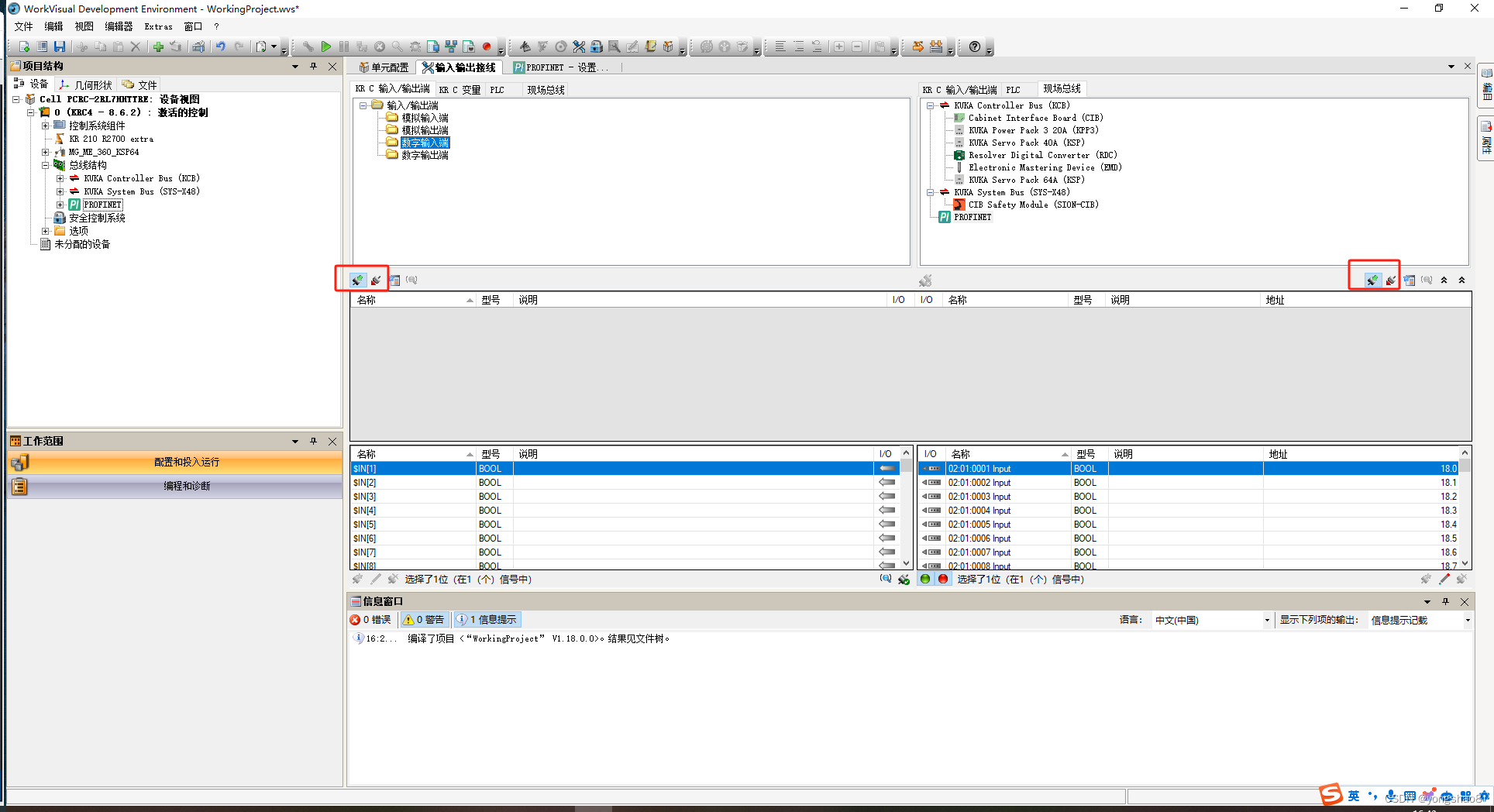
根据自己需求将KRC端的输入/输出端与PROFINET端的输入/输出端映射对应上。
7、 IO映射编组BYTE,INT等其他类型
KRC中的输入/输出选择连续的8个位,OUT[271]-OUT[278],鼠标右键选择编组,选择需要编组的类型。
若需要映射非BOOL类型的IO,需要手动将KRC输入输出端进行编组。

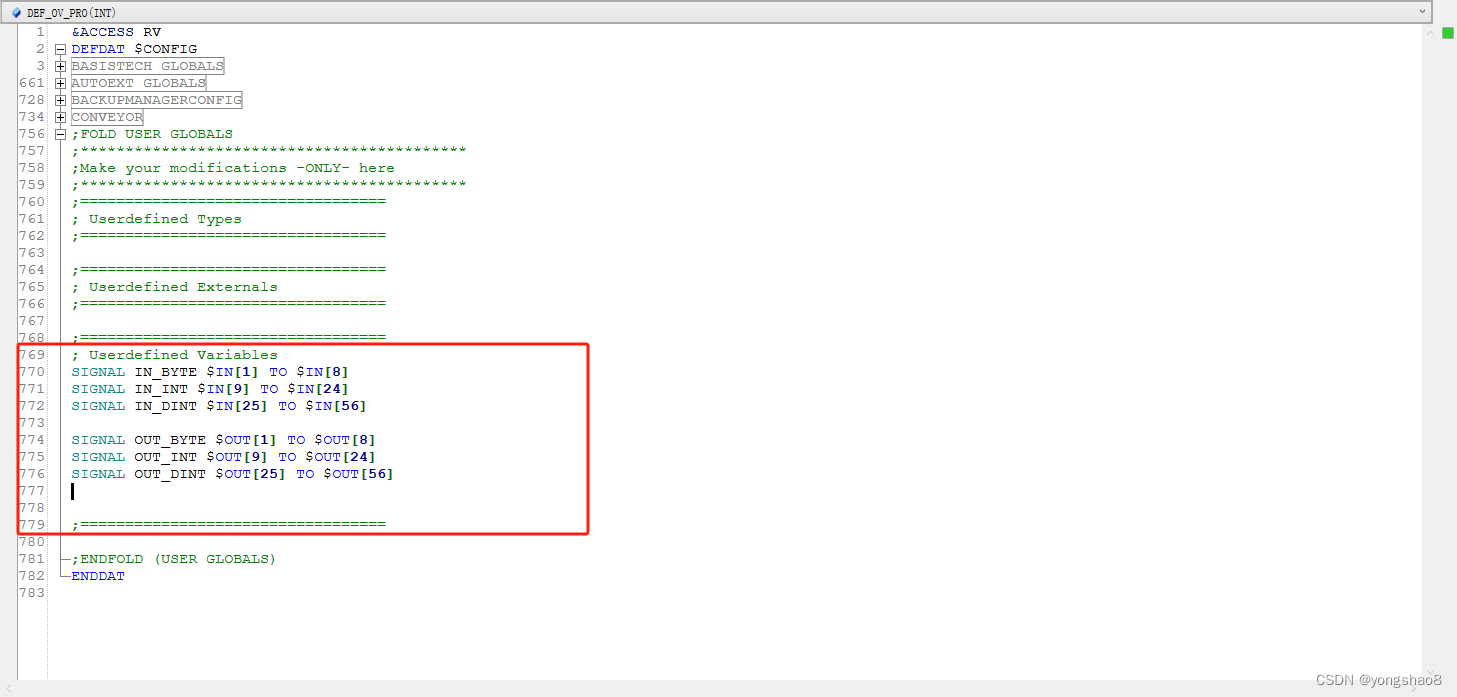
8、自定义数据变量
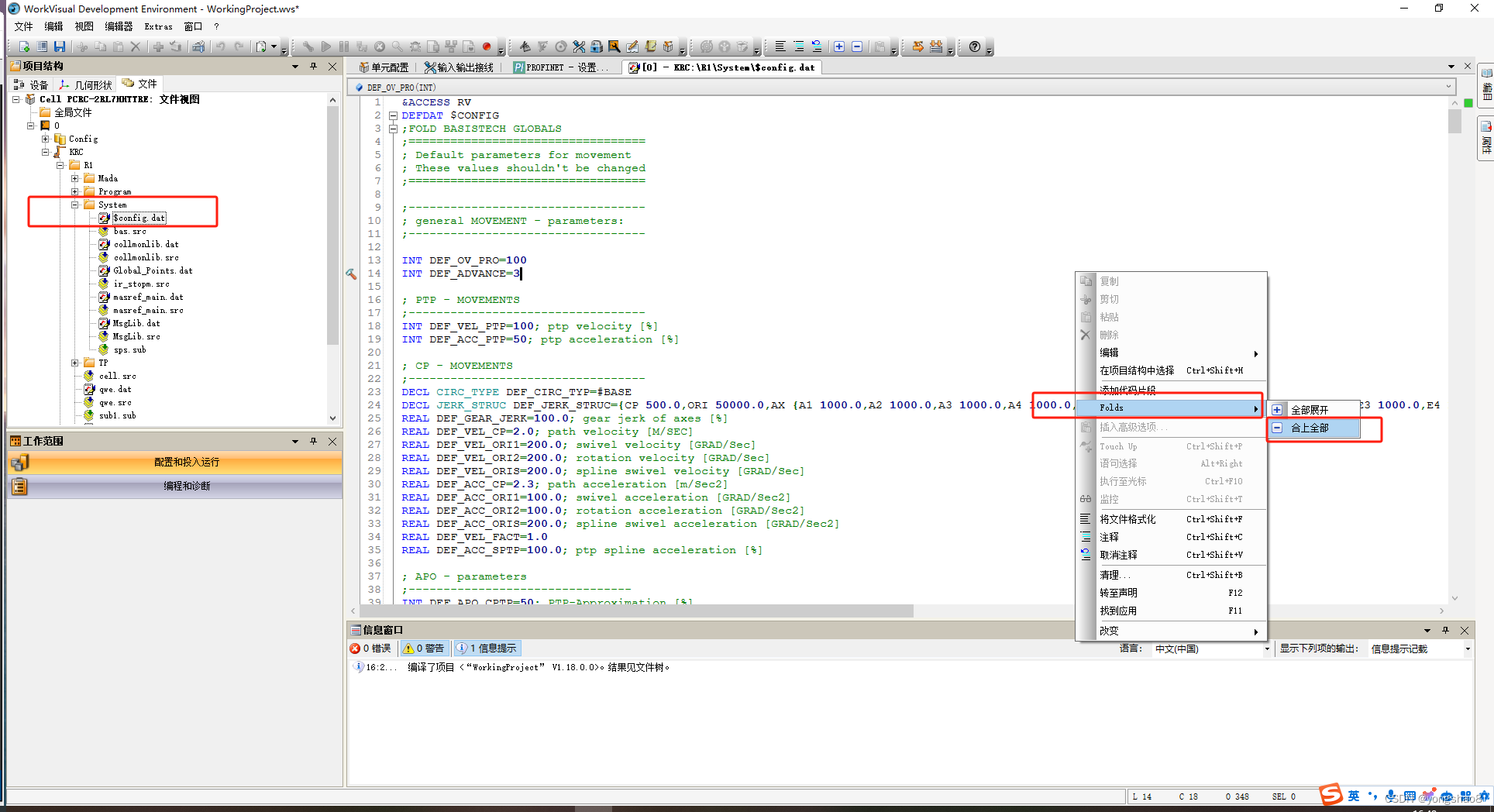
项目结构中文件–控制器名称–KRC–SYSTEM–$config.dat,进入系统配置文件。
鼠标右键点击空白处–Folds–合上全部。
找到Userdefined Variables。
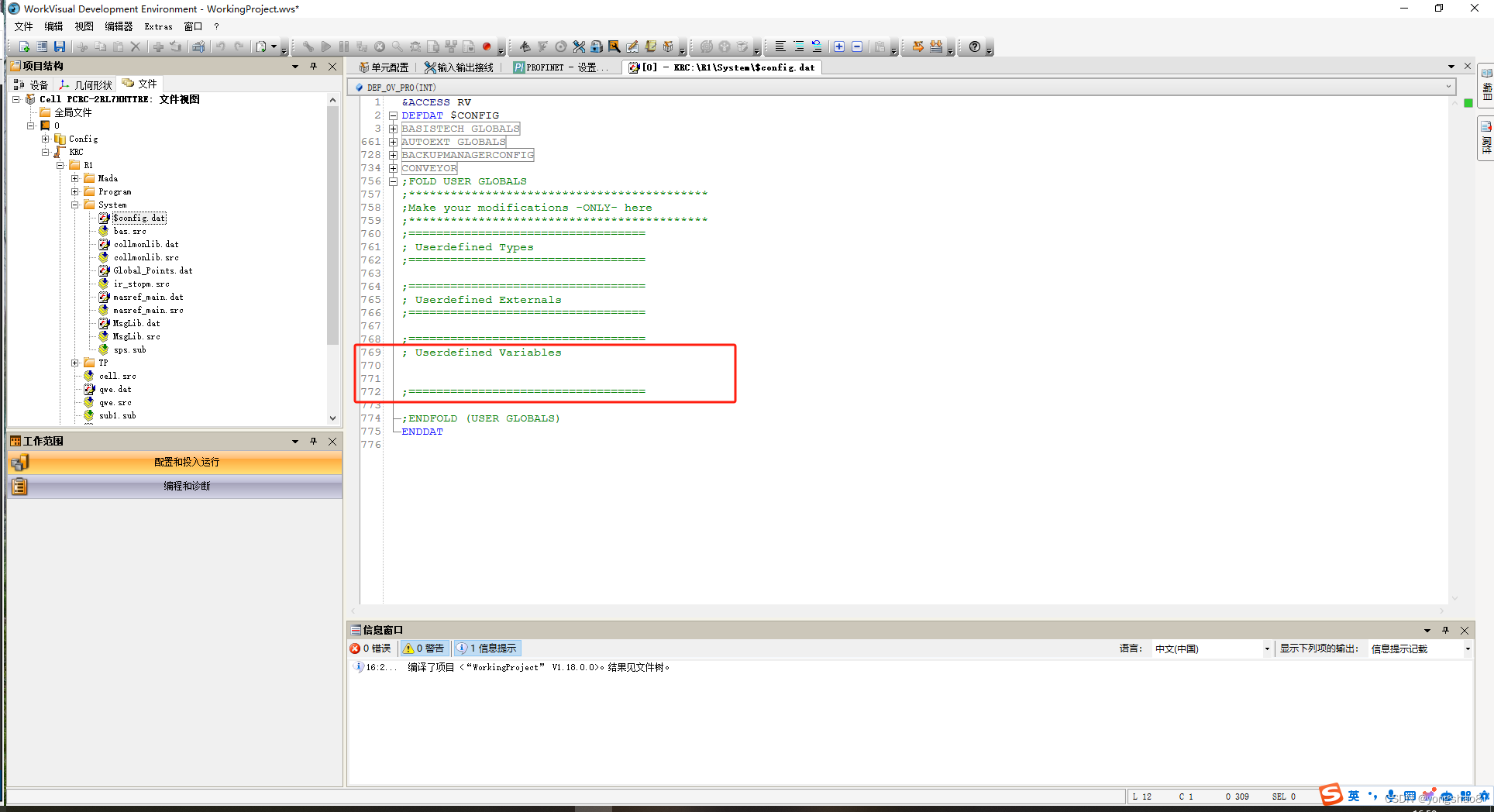
自定义变量,我这里定义了BYTE,INT,DINT的变量,即可实现PLC和kuka机械臂之间的数据传输。


















 1745
1745

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











