







KUKA PN-IO通讯配置——作为设备站
编写前言
为何想写这些经验?
之前只专注于工业自动化PLC部分,对机器人侧的设计逻辑了解较浅,所以一直有系统学习KUKA机器人的想法。上段时间刚好有些空闲学习了KUKA机器人应用技术的基础知识,加之最近项目有大量KUKA机器人可供学习实践。因此突发兴趣,想通过边学边用的机会把认为有记录分享价值的调试操作、理论理解、实践经验总结成文进行记录分享。
编写目的用途
- 方便自己以后记录回顾、参考积累、对比升级完善(好记性不如电子文档化)
- 方便快速分享给他人参考&进行技术交流
- 供我发布的其它经验进行关联参考
- 自己理解下的经验文档呈现(在查阅网上其他类似博文后觉得不够贴切,毕竟每个工程师都有自己的理解与实现方式,写出来的经验不一定符合自己的理解与需求)
技术经验测试环境
- PLC:
- 控制器:Siemens S7-1214C DC/DC/DC
- IDE:TIA-Portal V17
- ROB:
- 控制器:KRC4 (8.6.13)
- 系统固件:KSS 8.6.13
- 选件包:KUKA.PROFINET S (V5.0.5.51)
- 本体:KR 210 R2700-2
- IDE:WorkVisual 6.0.31
- ROB:KRC
- 控制器:KRC4 (8.6.13)
基本准备条件
KUKA控制器软件系统直接支持Profinet通讯,无需采购添加额外通讯硬件模块或板卡。硬件连接上只需通过工业网线将控制器柜内KPC(KUKA PC)主机网卡KLI接口(KUKA Line Interface,图2-7)与外部PN控制器网络相连接。这里与S7-1200 PLC控制器通过工业交换机(支持LLDP)连接。连接注意保证KLI网口指示灯正常闪烁即代表连接正常。
详细硬件接口连接说明参考官方手册“KR C4 标准控制柜说明”1

(部分型号产品将KLI接口引到控制柜底部接线板X66接口,如图 2-6,此情况推荐接到底部防尘X66网口上)

一 、PN设备组态配置(KUKA侧)
KUKA侧组态配置主要包括安装Profinet选件包、配置总线结构树、配置PN设备站的通讯参数、机器人交互信号表配置。初次配置稍微复杂繁琐,不过在交互信号配置过程中可以利用我做好的Excel表模板进行快速导入。以下配置过程参考“ProfiNet 总线通讯技术手册”2与“Workvisual6.0 使用手册”3对配置步骤进行简单图文说明。
安装KUKA.PROFINET选件包
获取选件包
KUKA选件包可以在官方渠道采购获取。若机器人采购时选配了Profinet功能,可直接在机器人控制器系统盘默认选件包路径 [C:\KukaOptionPackage] 中拷贝对应选件安装包(xxx.kop文件)。安装方式可以通过WorkVisual安装或者通过KCP(Smart-HMI)示教器安装。


注意: 选件包有 KUKA.PROFINET MS 与 KUKA.PROFINET S两种。根据官方手册2理解,以MS结尾代表可配置为PN主站*( PROFINET Controller)与PN从站(PROFINET Device),而以S结尾代表只可以配置为PN从站。因此在下猜测MS后缀为英文缩写M=Master,S=Slave。
通过U盘在KCP示教器上导入并安装
- 将包含选件包U盘插入控制柜USB接口上(目录显示盘符K:\)或KCP示教器USB接口上(目录显示盘符E:\)。注意在【管理员】权限下操作。
- 在主菜单中进入投入运行 > 辅助软件。

- 按下新软件:在 名称 列中必须显示条目 KUKA.PROFINET MS或KUKA.PROFINET S,而在 路径 列中必须显示驱动器 E:\ 或 K:\。否则按下更新/刷新键,从而刷新目录下的可安装文件进行列出。
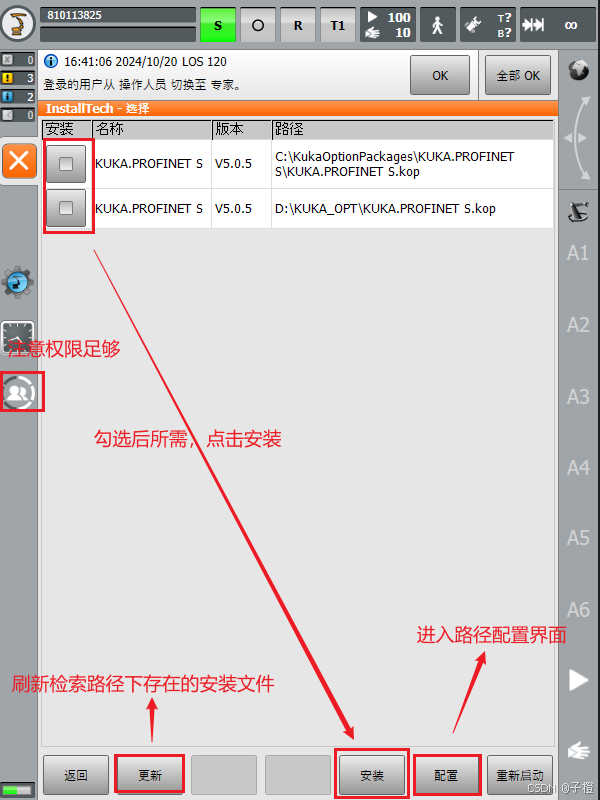
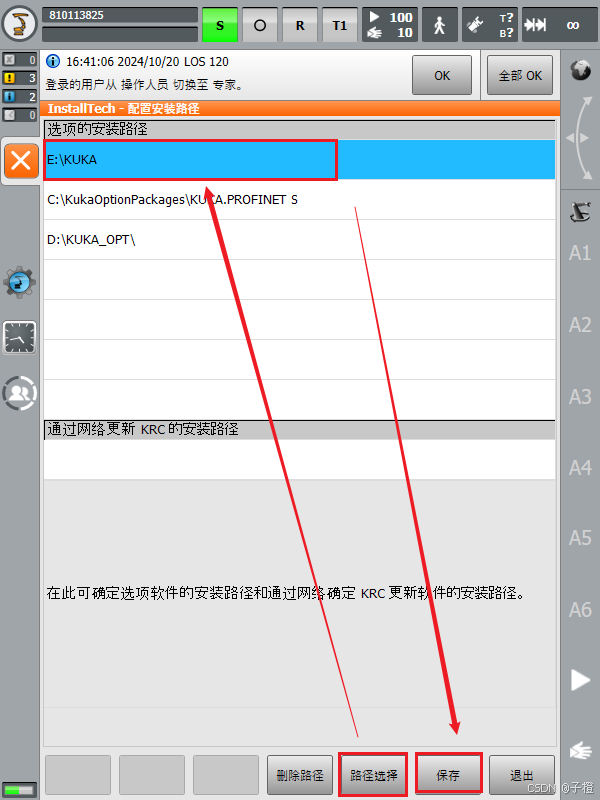
- 若未检索到U盘的kop文件,可以通过上图的安装检索路径“配置”按钮进入如下图所示路径手动配置界面,点击“路径”将U中选件包kop文件所在路径添加到路径列表中,点击保存,再次回到上图刷新显示即可。
- 勾选 KUKA.PROFINET MS 或 KUKA.PROFINET S,然后点击 安装。点击 OK 确认安装提示。
- 将显示安全询问“允许激活项目 […] 吗?”。激活时,当前活动的项目被覆盖。如果没有相关的项目要覆盖:点击是确认询问。
- 此时将显示修改概览以及一条安全询问。用是回答该询问。安装该备选软件包后机器人控制系统执行重启即可安装生效。
通过WorkVisual工程项目导入并安装
-
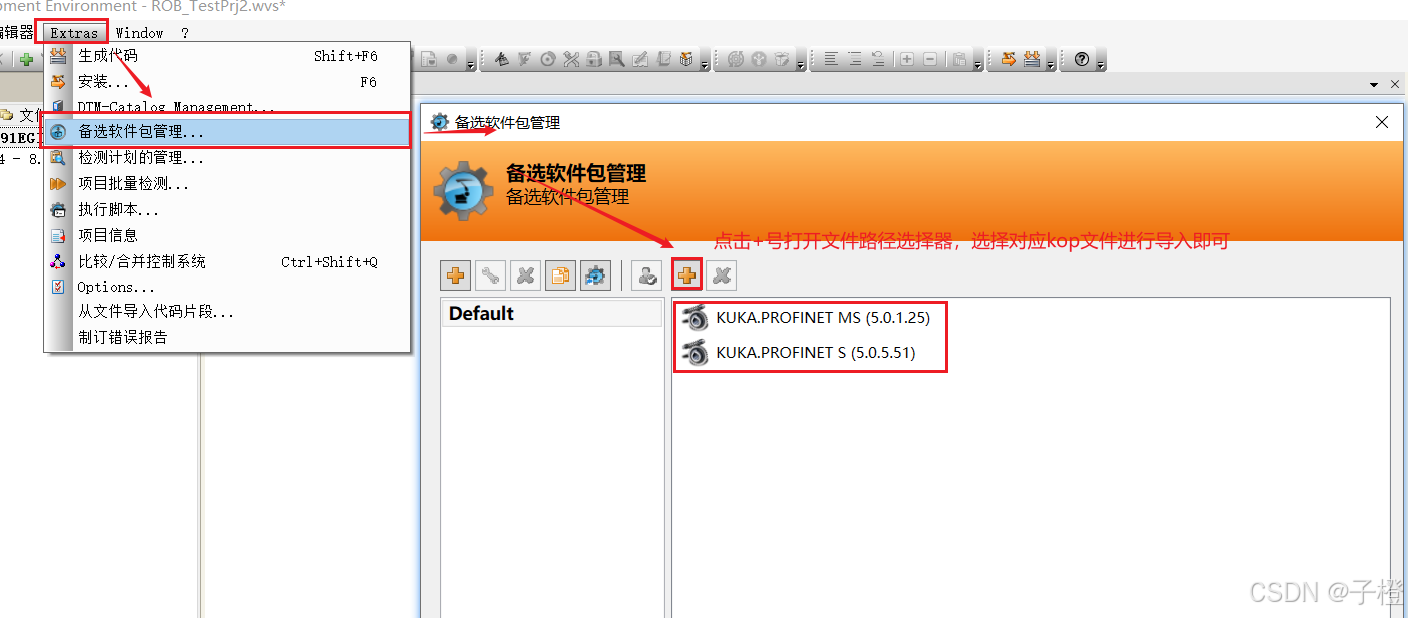
在WorkVisual软件窗口中【点击菜单栏Extras > 备选软件包管理… > 弹出“备选软件包管理”界面】
-
在备选软件包管理界面右侧 “+” 号按钮(通过文件添加软件包按钮)打开kop文件选择
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1699
1699

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









