









题意:
在一条笔直的路上进行赛跑,给出n个运动员的初始坐标和速度大小,假设所有人都会不停地跑,问有都少人可能在某时刻成为第一。
解:
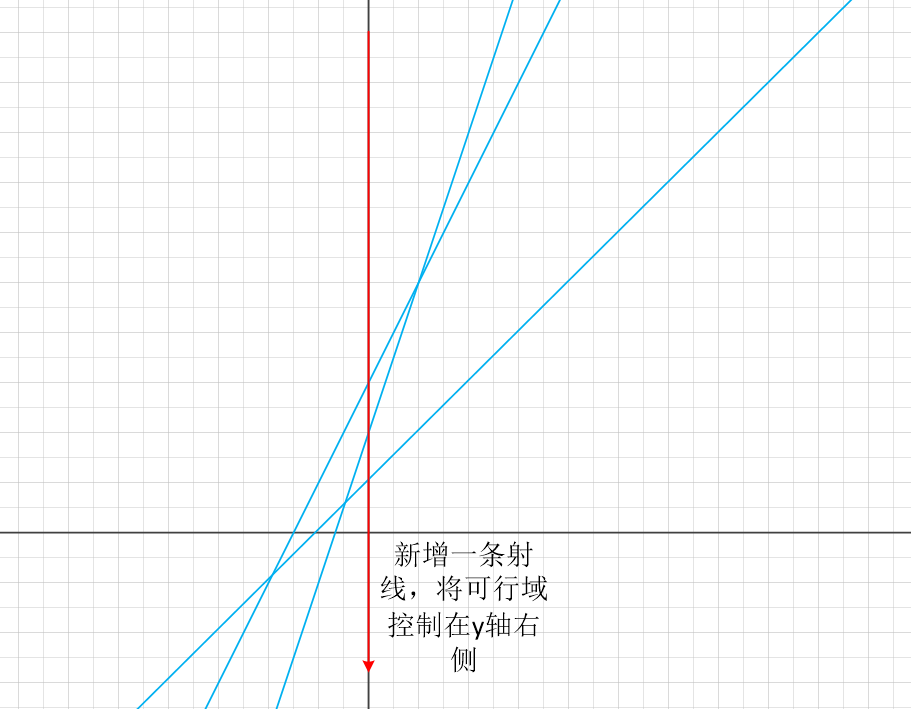
以初始位置为纵坐标,速度为斜率,构造射线。进行半平面交,每条射线的左方为所求部分,现在要找出所求部分的边缘线。
#include<cstdio>
#include<string>
#include<cstring>
#include<iostream>
#include<cmath>
#include<algorithm>
#include<vector>
using namespace std;
#define all(x) (x).begin(), (x).end()
#define for0(a, n) for (int (a) = 0; (a) < (n); (a)++)
#define for1(a, n) for (int (a) = 1; (a) <= (n); (a)++)
#define mes(a,x,s) memset(a,x,(s)*sizeof a[0])
#define mem(a,x) memset(a,x,sizeof a)
#define ysk(x) (1<<(x))
typedef long long ll;
typedef pair<int, int> pii;
const int INF =0x3f3f3f3f;
const int maxn= 50000 ;
const double PI=cos(-1.0);
const double eps=1e-10;
int dcmp(double x)
{
if(fabs(x)<eps) return 0;
else return x<0?-1:1;
}
struct Point
{
double x,y;
Point(double x=0,double y=0):x(x),y(y) {};
bool operator ==(const Point B)const {return dcmp(x-B.x)==0&&dcmp(y-B.y)==0;}
bool operator<(const Point& b)const
{
return dcmp(x-b.x)<0|| dcmp(x-b.x)==0 &&dcmp(y-b.y)<0;
}
}poly[maxn+10];
typedef Point Vector;
Vector operator -(Vector A,Vector B) {return Vector(A.x-B.x,A.y-B.y); }
double Cross(Vector A,Vector B)//叉乘
{
return A.x*B.y-A.y*B.x;
}
double Dot(Vector A,Vector B)//点乘
{
return A.x*B.x+A.y*B.y;
}
Vector operator +(Vector A,Vector B) {return Vector(A.x+B.x,A.y+B.y); }
Vector operator *(Vector A,double p) {return Vector(A.x*p,A.y*p); }
Point GetLineIntersection(Point P,Vector v,Point Q,Vector w)//点线式
{
Vector u=P-Q;
double t=Cross(w,u)/Cross(v,w);
return P+v*t;
}
struct Line
{
Point p,p2;
Vector v;
double ang;
Line(){}
Line(Point a,Vector v):p(a),v(v){ang=atan2(v.y,v.x); }//点线式
void twoPointIntial(Point p,Point p2)//两点式
{
this->p=p;
this->p2=p2;
v= p2-p;
ang=atan2(v.y,v.x);
}
bool operator<(const Line & L)const
{
return ang<L.ang;
}
}L[maxn+10];
typedef Line Seg;
Point GetIntersection(Line a,Line b)
{
Vector u=a.p-b.p;
double t=Cross(b.v,u)/Cross(a.v,b.v);
return a.p+a.v*t;
}
bool OnLeft(Line L,Point p)
{
return Cross(L.v,p-L.p)>0;
}
Point p[maxn+5];
Line q[maxn+5];
int HalfplaneIntersection(Line* L,int n,Point * poly)
{
sort(L,L+n);
int first,last;
q[first=last=0]=L[0];
for(int i=1;i<n;i++)
{
while(first<last&&!OnLeft(L[i],p[last-1] ) ) last--;
while(first<last&&!OnLeft(L[i],p[first])) first++;
q[++last]=L[i];
if(fabs(Cross(q[last].v,q[last-1].v) )<eps )
{
last--;
if(OnLeft(q[last],L[i].p) ) q[last]=L[i];
}
if(first<last) p[last-1]=GetIntersection(q[last-1],q[last] );
}
while(first<last&&!OnLeft(q[first],p[last-1])) last--;
if(last-first<=1) return 2;
p[last]=GetIntersection(q[last],q[first]);
int m=0;
for(int i=first;i<=last;i++) poly[m++]=p[i];
return m;
}
int main()
{
std::ios::sync_with_stdio(false);
int T,n;cin>>T;
while(T--)
{
cin>>n;
for0(i,n)
{
double p,sp;
cin>>p>>sp;
L[i]=Line(Point(0,p),Vector(1,sp));
}
L[n++].twoPointIntial(Point(0,0),Point(0,-INF));
int m=HalfplaneIntersection(L,n,poly);
printf("%d\n",m-1);
}
return 0;
}
/*
1
1
1 1
*/
最后减去1,是为了减去新增加的1条边。在此题进行半平面角后的结果集合中,有多少个点正好就对应多少条边。















 480
480

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









